") 考慮柔性負(fù)荷的微電網(wǎng)快速一致性多目標(biāo)調(diào)度
考慮柔性負(fù)荷的微電網(wǎng)快速一致性多目標(biāo)調(diào)度

作者:邵雪蓮,陳珍萍,付保川,吳征天
引 言
隨著分布式能源的大量涌現(xiàn),微電網(wǎng)作為接納眾多分布式電源的有效方式,受到了廣泛關(guān)注。然而,微電網(wǎng)在面對分布式電力元件接入時存在著一些弊端,例如環(huán)境污染較為嚴(yán)重、經(jīng)濟效益不高、難以靈活應(yīng)對柔性負(fù)荷的即插即用、系統(tǒng)的穩(wěn)定性受機組的變化影響較大等。
經(jīng)濟調(diào)度指在滿足一定的系統(tǒng)約束前提下,通過合理安排發(fā)電使系統(tǒng)運行的經(jīng)濟性盡可能地提高。國內(nèi)外關(guān)于微電網(wǎng)的經(jīng)濟運行與優(yōu)化調(diào)度的研究一直處于有增無減的趨勢。經(jīng)濟調(diào)度算法基本分為兩類:集中式算法(如λ迭代法、生物遺傳算法、免疫粒子群算法等)和分布式算法(如基于復(fù)制因子的算法、一致性算法、交替乘子算法等)。現(xiàn)有的經(jīng)濟調(diào)度大多是僅僅考慮了發(fā)電成本最小的單目標(biāo)優(yōu)化問題,無法滿足微電網(wǎng)多元件參與與節(jié)能減排的發(fā)展趨勢。
為了實現(xiàn)微電網(wǎng)的多目標(biāo)優(yōu)化調(diào)度運行,文獻[11]研究了在時延和噪聲等通信環(huán)境下兼顧經(jīng)濟和環(huán)境的多目標(biāo)調(diào)度模型,在一致性算法中額外引入了虛擬一致性變量,避免了不理想通信環(huán)境帶來的影響,但是未考慮儲能裝置和柔性負(fù)荷的協(xié)調(diào)作用,并且其目標(biāo)函數(shù)只涉及到了發(fā)電機,沒有考慮其他電力元件的出力調(diào)度。文獻[5]針對電熱綜合能源系統(tǒng)研究了計及網(wǎng)絡(luò)傳輸損耗的電熱綜合能源系統(tǒng)多目標(biāo)優(yōu)化調(diào)度模型,該模型同時考慮電傳輸損耗和熱傳輸損耗,采用了基于雙層雙 λ的迭代算法以最小化系統(tǒng)經(jīng)濟環(huán)境調(diào)度目標(biāo),但屬于集中式控制。文獻[12]針對電轉(zhuǎn)氣設(shè)備接入綜合能源系統(tǒng)時,用戶的行為會影響電、熱負(fù)荷比例的問題,建立了考慮用戶需求響應(yīng)的兼顧電?氣?熱的兩階段日前綜合能源系統(tǒng)經(jīng)濟調(diào)度模型,不僅促進了清潔能源的利用率,還提高了系統(tǒng)的經(jīng)濟性,但是未考慮系統(tǒng)的傳輸損耗。
微電網(wǎng)信息通信網(wǎng)絡(luò)和電力物理網(wǎng)絡(luò)在未來的聯(lián)合會越來越緊密,因而可以考慮借助多智能體系統(tǒng)一致性算法,充分利用雙方滲透的便利實現(xiàn)多目標(biāo)優(yōu)化調(diào)度。在實際的應(yīng)用中,一致性協(xié)議好壞的性能指標(biāo)和系統(tǒng)的穩(wěn)定性均與算法的收斂速度有關(guān)。同時,由于可再生能源易受環(huán)境影響,用電負(fù)荷也不規(guī)律變動,導(dǎo)致微電網(wǎng)的調(diào)度需求十分頻繁,因此要求一致性協(xié)議有較高的計算速度。
基于現(xiàn)有研究,本文將快速一致性算法引入含柔性負(fù)荷的微電網(wǎng)環(huán)境經(jīng)濟多目標(biāo)調(diào)度中。首先,建立一種綜合考慮污染氣體排放、傳統(tǒng)發(fā)電機發(fā)電成本、儲能成本、柔性負(fù)荷用電效益及網(wǎng)絡(luò)損耗的微電網(wǎng)多目標(biāo)優(yōu)化模型;其次,應(yīng)用線性加權(quán)法將多目標(biāo)優(yōu)化問題轉(zhuǎn)化為單目標(biāo)優(yōu)化問題;再次,采用引入反饋增益的分布式快速一致性算法和拉格朗日乘子法求解該優(yōu)化模型;最后,基于改進的IEEE 14節(jié)點系統(tǒng),通過3個算例驗證了所提方法的有效性。
1、理論基礎(chǔ)
1.1 分布式調(diào)度
傳統(tǒng)的電力調(diào)度往往采用集中式方法,此方法對調(diào)度中心的要求和依賴性較高,一旦故障易導(dǎo)致整個控制系統(tǒng)癱瘓,并且各節(jié)點與中心的通信建設(shè)與維護成本較高,另外系統(tǒng)難以應(yīng)對頻繁的時變拓?fù)洹?/p>
與集中式方法相比,分布式調(diào)度可以在每個智能體中同時進行一致性變量的迭代計算。領(lǐng)導(dǎo)者負(fù)責(zé)系統(tǒng)功率平衡的集中調(diào)整,確保所有智能體在迭代計算后能收斂。因而分布式方法有較大的靈活性和可擴展性。
1.2 快速一致性算法
本文用有向圖G表示微電網(wǎng)中節(jié)點間的通信關(guān)系。鄰接矩陣A=(apq)n×n用來描述節(jié)點p, q之間的通信關(guān)系,其中,n表示節(jié)點數(shù)。節(jié)點p能夠獲取節(jié)點q的狀態(tài)信息時,apq=1;當(dāng)節(jié)點p無法獲取節(jié)點q的信息或當(dāng)p=q時,apq=0。定義節(jié)點 p 的鄰居集合為Np;圖G的入度矩陣為D=diag(dpp),其中dpp=∑p≠qapq。
多智能體系統(tǒng)一致性算法發(fā)展至今已有多種形式,其中,一階離散一致性算法得到了較為廣泛的應(yīng)用,可以表示為:

式中:xp (t)是第p個智能體的狀態(tài),t為迭代序列;mpq 為行隨機矩陣的第(p, q )個元素。
一致性算法式(1)常見于無向通信電網(wǎng)經(jīng)濟調(diào)度中,為區(qū)別起見,本文將式(1)記為傳統(tǒng)一致性算法。為提高有向通信微電網(wǎng)多目標(biāo)調(diào)度的收斂速度,本文選用基于局部信息反饋的單增益快速一致性算法[13]:
式中:kp > 0 ( p = 1, 2,?, n )為智能體 p的反饋增益;np為智能體 p 的鄰居智能體數(shù)量,也即智能體 p 的入度,且有np=dpp。
2、基于快速一致性的多目標(biāo)調(diào)度
2.1 多目標(biāo)模型
本文研究的微電網(wǎng)處于獨立運行方式,采用的優(yōu)化策略是:同時考慮經(jīng)濟和環(huán)境兩個目標(biāo),通過優(yōu)化控制燃料發(fā)電機、儲能蓄電池和柔性負(fù)荷等可控電力元件的有功功率,最小化微電網(wǎng)的運行成本和污染物排放綜合總目標(biāo)。
2.1.1 環(huán)境調(diào)度
環(huán)境調(diào)度指在最小化系統(tǒng)中傳統(tǒng)燃料發(fā)電機的污染氣體排放量。環(huán)境調(diào)度的目標(biāo)函數(shù)具體描述為:

式中:αi, βi, γi為第i臺機組的排放系數(shù);PGi為第i個發(fā)電機組的輸出功率;SG為發(fā)電機單元集合;ei ( PGi )為第 i個發(fā)電機組的污染氣體排放量,可以按一定規(guī)則換算成費用[11]。
2.1.2 經(jīng)濟調(diào)度
本文將柔性負(fù)荷考慮進經(jīng)濟調(diào)度目標(biāo),符合微電網(wǎng)社會效益最大的現(xiàn)實需求。經(jīng)濟調(diào)度涉及儲能蓄電池成本、傳統(tǒng)燃料發(fā)電機的有功發(fā)電成本和柔性負(fù)荷的用電效益。
式中:ζ表示蓄電池儲能成本的參數(shù);αi, βi, γi分別為第i個發(fā)電單元成本的參數(shù);aj, bj,cj 分別為第 j 個柔性負(fù)荷用電效益的參數(shù);PGi 為第 i 個發(fā)電機組的輸出功率;PDj 為第 j個柔性負(fù)荷的功率;SG為發(fā)電機單元集合;SD為柔性負(fù)載單元集合。
那么經(jīng)濟調(diào)度目標(biāo)為:

2.1.3 綜合環(huán)境與經(jīng)濟的多目標(biāo)模型
微電網(wǎng)中有功傳輸損耗通常占總負(fù)荷功率的3%~7%,因而將傳輸損耗考慮進系統(tǒng)功率平衡非常重要。假定傳輸損耗與負(fù)荷的關(guān)系是線性的[14],用傳輸損耗因子sr表示傳輸損耗 PL:

在微電網(wǎng)多目標(biāo)調(diào)度過程中,需滿足有功功率平衡約束。用ΔP表示系統(tǒng)總有功功率差,則有:

式中:PREG表示可再生能源機組功率;Pd表示系統(tǒng)純負(fù)荷總功率;PB表示儲能電池的功率。
為了同時處理環(huán)境與經(jīng)濟兩個目標(biāo),采用線性加權(quán)法將多目標(biāo)問題轉(zhuǎn)化為單目標(biāo)問題,兼顧到功率平衡,那么綜合環(huán)境與經(jīng)濟的多目標(biāo)模型可表述如下:

式中ω1+ω2=1且0<ω1 ,ω2<1。
2.2 基于快速一致性的調(diào)度方法
對于最小化問題式(10),利用拉格朗日乘子法將等式約束問題轉(zhuǎn)化為如下無約束問題:

式中 λ表示與等式約束對應(yīng)的拉格朗日乘子。對式(11)中變量 PDj,PGi,PB 和 λ 分別求偏導(dǎo)并求解其方程組,可得系統(tǒng)多目標(biāo)調(diào)度模型最優(yōu)解為:

綜合式(3)~式(6)和式(12),可求得對應(yīng)的發(fā)電機、柔性負(fù)荷、儲能蓄電池的 λ分別為:

基于上述分析,可選擇λ為該一致性算法的一致性變量,通過與鄰居交換信息更新其一致性變量,最終使得網(wǎng)絡(luò)中所有智能體的一致性變量收斂于統(tǒng)一值,也即λGi = λDj = λB,實現(xiàn)了系統(tǒng)的最優(yōu)調(diào)度目標(biāo)式(12)。假設(shè)微電網(wǎng)中每個發(fā)電機、柔性負(fù)荷和儲能蓄電池都已嵌入了一個本地智能體,將其記為智能體p。根據(jù)式(2),系統(tǒng)發(fā)電機、柔性負(fù)荷和儲能蓄電池的λ快速一致性算法可寫為:
在一致性迭代過程中,為保證系統(tǒng)的功率平衡,需選擇一個“決策主節(jié)點”,即“領(lǐng)導(dǎo)節(jié)點”。“領(lǐng)導(dǎo)節(jié)點”通過獲取系統(tǒng)的整體功率偏差不斷調(diào)節(jié)自身一致性變量,通過信息交換促使其他節(jié)點的一致性變量實現(xiàn)實時調(diào)整。對于領(lǐng)導(dǎo)節(jié)點,其更新公式為:
式中:ε為功率平衡調(diào)節(jié)系數(shù),與“領(lǐng)導(dǎo)節(jié)點”的收斂速度有關(guān),一般設(shè)為正標(biāo)量。
本文將系統(tǒng)的功率偏差作為判斷收斂的條件,即當(dāng)|ΔP≤δ|,認(rèn)為該一致性算法達到了收斂,其中δ為一個閾值,取值一般很小。
在實際的微電網(wǎng)中,考慮到發(fā)電機組、柔性負(fù)荷和儲能蓄電池的有功功率都為受限值,可用下述不等式表示:
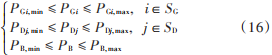
式中:PGi, max與PGi, min為第 i個發(fā)電機的出力上下限;PDi, max和 PDi, min為第 i個柔性負(fù)荷的出力上下限;PB, max和PB, min為儲能蓄電池功率的上下限。
綜合式(13)和式(16)可得,傳統(tǒng)發(fā)電機、柔性負(fù)荷和儲能蓄電池有功功率迭代分別為:
基于快速一致性的調(diào)度算法步驟如下:
Step1:輸入各節(jié)點的初始功率值,得到各節(jié)點一致性變量的初值 λp ( 0 )和系統(tǒng)初始功率差 ΔP(0);
Step2:微電網(wǎng)中跟隨節(jié)點和“領(lǐng)導(dǎo)節(jié)點”分別按照一致性迭代式(14)和式(15)計算 λp (t);
Step3:根據(jù)更新后的λp (t),網(wǎng)絡(luò)發(fā)電機節(jié)點、柔性負(fù)荷節(jié)點和儲能節(jié)點分別按照式(17)、式(18)和式(19)計算 PGi (t),PDj (t)和PB (t);
Step4:"領(lǐng)導(dǎo)節(jié)點"根據(jù) PGi (t),PDj(t)PB(t)的計算值,按照 求系統(tǒng)ΔP(t),并判斷|ΔP(t)|≤δ是否滿足,若滿足,則迭代結(jié)束,系統(tǒng)多目標(biāo)調(diào)度達到最優(yōu);否則,跳轉(zhuǎn)至 Step2繼續(xù)進行迭代和功率調(diào)整。
求系統(tǒng)ΔP(t),并判斷|ΔP(t)|≤δ是否滿足,若滿足,則迭代結(jié)束,系統(tǒng)多目標(biāo)調(diào)度達到最優(yōu);否則,跳轉(zhuǎn)至 Step2繼續(xù)進行迭代和功率調(diào)整。
3、仿真結(jié)果與分析
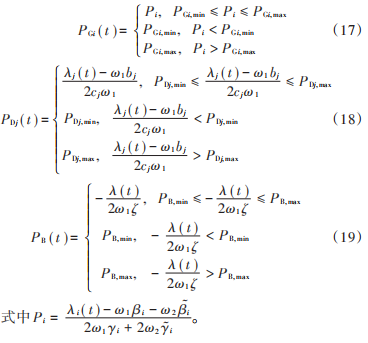
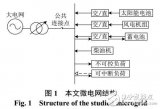
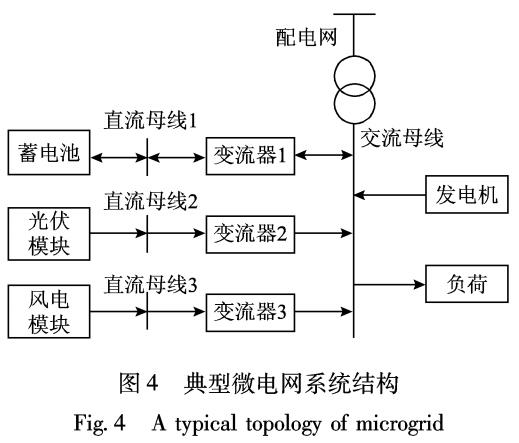
基于改進的IEEE 14系統(tǒng)圖進行仿真以驗證本文所提策略的有效性。系統(tǒng)通信網(wǎng)絡(luò)的有向拓?fù)淙鐖D1所示。節(jié)點1~節(jié)點4分別表示發(fā)電機G1~G4,節(jié)點 5~節(jié)點 7 分別表示柔性負(fù)荷D1~D3,節(jié)點8表示儲能蓄電池B。
3.1 系統(tǒng)參數(shù)設(shè)置
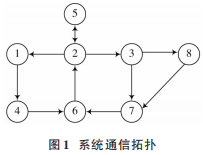
考慮到系統(tǒng)的收斂性和最優(yōu)調(diào)度結(jié)果不受傳統(tǒng)發(fā)電機參數(shù)αi,αi 和柔性負(fù)荷參數(shù)aj的影響,設(shè)定αi=αi=aj=0。由于系統(tǒng)中存在儲能設(shè)備,可再生能源發(fā)電機在一定時間內(nèi)可以維持其功率恒定,設(shè)置可再生能源輸出功率PREG=300 MW 不變。系統(tǒng)的基礎(chǔ)純負(fù)荷設(shè)為400MW。設(shè)置ω1=0.25,ω2=0.75 ,判 定 系 數(shù)δ=0.001。微電網(wǎng)電力單元相關(guān)參數(shù)及發(fā)電約束參數(shù)如表1~表3所示。在調(diào)度過程中將G2和D2設(shè)為“領(lǐng)導(dǎo)節(jié)點”。假設(shè)所有可控機組的功率范圍均在調(diào)控范圍內(nèi)。采用集中式方法調(diào)度時,該系統(tǒng)的綜合調(diào)度最優(yōu)解為λ=89.68 $/MW。
3.2 有效性驗證
取kp=0.15,也即k1=k2=?=k9=0.15,收斂因子ε=0.03,仿真結(jié)果如圖2所示。從圖 2 中可以看出,與集中式調(diào)度結(jié)果相同,快速一致性算法的一致性變量在第151次迭代時也收斂到了λ=89.68 $/MW,表明該算法能實現(xiàn)系統(tǒng)的多目標(biāo)調(diào)度,可以使系統(tǒng)達到最優(yōu)運行狀態(tài),并且滿足了系統(tǒng)的功率平衡要求。

3.3 算法收斂速度的討論
1)反饋增益kp對收斂速度的影響
收斂因子仍取ε=0.03,分別將反饋增益kp由 0.15增大至 0.25 和 0.8。由仿真結(jié)果圖 3 可以看出:系統(tǒng)的一致性變量仍收斂到了λ=89.68 $/MW;kp=0.25時系統(tǒng)的一致性變量在第101次迭代時達到收斂,比kp=0.15 時的迭代次數(shù)提前了50次;kp=0.8時系統(tǒng)的一致性變量在第72次迭代時達到收斂,比kp=0.25 的迭代次數(shù)提前了29次。仿真結(jié)果表明,反饋增益kp在一定范圍內(nèi)取值越大,系統(tǒng)收斂速度越快,系統(tǒng)越能提前到達目標(biāo)最優(yōu)運行狀態(tài),越有利于系統(tǒng)的穩(wěn)定運行。

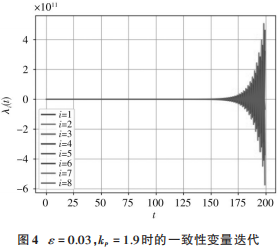
然而當(dāng)反饋增益 kp 逐漸增大到1.9時,系統(tǒng)不再收斂,如圖4所示。說明適當(dāng)?shù)脑龃蠓答佋鲆嬗欣诩涌煜到y(tǒng)的收斂速度;若取值過大則會擾亂系統(tǒng)的穩(wěn)定性,甚至造成系統(tǒng)的不穩(wěn)定。
2)同時調(diào)節(jié)反饋增益 kp 和功率平衡調(diào)節(jié)系數(shù) ε 對系統(tǒng)收斂速度的影響
由于 ε 為功率平衡調(diào)節(jié)系數(shù),它的變化會影響“領(lǐng)導(dǎo)節(jié)點”的收斂速度,而“領(lǐng)導(dǎo)節(jié)點”收斂速度的改變會影響系統(tǒng)的收斂速度。因而,可進一步考慮同時調(diào)節(jié) kp和 ε對系統(tǒng)收斂速度的影響。
對比圖3a),首先保持kp=0.25不變,ε分別取0.015和0.05,由仿真結(jié)果圖5可以看出:當(dāng)ε =0.015時,系統(tǒng)一致性變量在第160次迭代時達到了收斂(λ=89.68 $/MW);當(dāng)ε=0.05 時,系統(tǒng)的一致性變量在第86次迭代時達到了收斂(λ=89.68 $/MW)。由此可見,功率平衡調(diào)節(jié)系數(shù)ε在一定范圍內(nèi)取值越大,系統(tǒng)收斂速度越快。

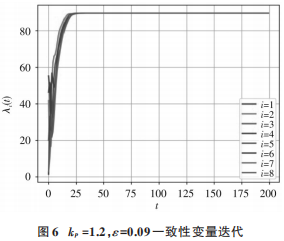
另取kp=1.2, ε=0.09,其仿真曲線如圖6所示。由圖6可以看出,系統(tǒng)的一致性變量在第27次迭代時達到了收斂(λ=89.68 $/MW),系統(tǒng)的收斂速度得到了顯著提高。為此,在某些場景中,若對系統(tǒng)收斂速度有要求,那么在參數(shù)設(shè)置時可以考慮同時增大反饋增益kp和調(diào)節(jié)系數(shù)ε;另外,若kp和ε 同時取值過大,會造成系統(tǒng)的不穩(wěn)定。
需要說明的是,通信網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)和“領(lǐng)導(dǎo)節(jié)點”的選擇[15]等因素也會影響系統(tǒng)的收斂速度,在此不再展開討論。
3)與傳統(tǒng)一致性算法的比較
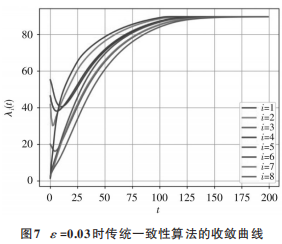
為了控制變量準(zhǔn)確對比,將傳統(tǒng)一致性算法中的 ε也設(shè)置為 0.03。從仿真結(jié)果圖 7 中可以看出:系統(tǒng)采用傳統(tǒng)一致性算法在第160次迭代時達到收斂(λ=89.68 $/MW);而快速一致性算法通過調(diào)節(jié)反饋增益kp可實現(xiàn)在第72次迭代時達到收斂(見圖 3b))。通過對比可知,快速一致性算法的收斂速度比傳統(tǒng)一致性算法的收斂速度提高了2.2倍左右。因而,基于快速一致性的微電網(wǎng)調(diào)度不僅實現(xiàn)了系統(tǒng)功率的合理分配,還有效提高了收斂速度,時間復(fù)雜度更小,比傳統(tǒng)一致性算法更加靈活應(yīng)對微電網(wǎng)的各種狀況。
3.4 應(yīng)對負(fù)荷變動的驗證
在實際調(diào)度過程中,高滲透的柔性負(fù)荷不可避免地會出現(xiàn)負(fù)荷波動,某些節(jié)點甚至?xí)驗椴豢煽匾蛩赝话l(fā)故障,導(dǎo)致微電網(wǎng)的通信拓?fù)浒l(fā)生變化。采用該快速一致性算法,即使調(diào)度過程中負(fù)荷發(fā)生了改變,只要通信拓?fù)鋱D是連通的,該算法仍然可以快速實現(xiàn)目標(biāo)調(diào)度。以算例2中kp= 0.8 和 ε = 0.03 為例,在迭代次數(shù)t=100次時,因為一些偶然因素,柔性負(fù)荷機組 D3 退出網(wǎng)絡(luò)調(diào)度,其他機組保持不變,仿真結(jié)果如圖8所示。

從圖 8 可以看出,當(dāng)柔性負(fù)荷 D3 退出時,余下機組的通信拓?fù)湟廊皇沁B通的,就能保證各個機組的一致性變量達到收斂。系統(tǒng)也由原先的最優(yōu)運行穩(wěn)定狀態(tài)(λ = 89.68 $/MW)進入到新的最優(yōu)運行穩(wěn)定狀態(tài)(λ =41.60 $/MW)。因而,該快速一致性分布式結(jié)構(gòu)更適用于處理拓?fù)渥儞Q和“即插即用”情況,具有更優(yōu)的穩(wěn)定性與可拓展性。
4、結(jié) 語
針對包含傳統(tǒng)燃料發(fā)電機、可再生能源發(fā)電機、柔性負(fù)荷與蓄電池的獨立微電網(wǎng)多目標(biāo)調(diào)度問題,本文提出了基于快速一致性算法的分布式優(yōu)化調(diào)度策略,與傳統(tǒng)一致性算法相比,能夠以較快的運行速度實現(xiàn)微電網(wǎng)多目標(biāo)調(diào)度。首先,建立微電網(wǎng)多目標(biāo)調(diào)度模型,包括多目標(biāo)優(yōu)化函數(shù)和約束條件;其次,采用線性加權(quán)法和拉格朗日乘子法求該優(yōu)化問題的最優(yōu)解,設(shè)計快速一致性算法,并給出算法實施步驟;最后,在改進的微電網(wǎng)IEEE 14系統(tǒng)中進行仿真驗證。仿真結(jié)果表明,該快速一致性算法在同等參數(shù)條件下比傳統(tǒng)一致性算法的收斂速度更快,且滿足了即插即用的要求,具有較高的可靠性。
在接下來的調(diào)度研究中,可綜合考慮多個相互沖突的多目標(biāo)多約束調(diào)度,目標(biāo)函數(shù)除了環(huán)保和經(jīng)濟,還可以考慮用戶滿意度等,約束條件可以兼顧無功功率、電壓及頻率等,以完善和補充現(xiàn)有的電力調(diào)度策略。
審核編輯:郭婷
-
發(fā)電機
+關(guān)注
關(guān)注
26文章
1691瀏覽量
69813 -
微電網(wǎng)
+關(guān)注
關(guān)注
24文章
895瀏覽量
35718 -
電池
+關(guān)注
關(guān)注
84文章
11106瀏覽量
135566
原文標(biāo)題:論文速覽 | 考慮柔性負(fù)荷的微電網(wǎng)快速一致性多目標(biāo)調(diào)度
文章出處:【微信號:現(xiàn)代電子技術(shù),微信公眾號:現(xiàn)代電子技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
順序一致性和TSO一致性分別是什么?SC和TSO到底哪個好?
一致性規(guī)劃研究
基于決策者偏好的微電網(wǎng)經(jīng)濟_環(huán)保多目標(biāo)優(yōu)化調(diào)度研究_李昕
加速器一致性接口
可中斷負(fù)荷的微電網(wǎng)多目標(biāo)優(yōu)化運行
Cache一致性協(xié)議優(yōu)化研究
微電網(wǎng)多目標(biāo)優(yōu)化方法

微電網(wǎng)多目標(biāo)能量優(yōu)化短時調(diào)度策略
優(yōu)化模型的乘性偏好關(guān)系一致性改進
風(fēng)光柴蓄微電網(wǎng)多目標(biāo)日前優(yōu)化調(diào)度研究
計及儲能和空調(diào)負(fù)荷的主動配電網(wǎng)多目標(biāo)優(yōu)化調(diào)度
基于業(yè)務(wù)目標(biāo)和業(yè)務(wù)場景的語義一致性驗證方法
如何保證緩存一致性

DDR一致性測試的操作步驟
深入理解數(shù)據(jù)備份的關(guān)鍵原則:應(yīng)用一致性與崩潰一致性的區(qū)別





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論