") 汽車AEBS技術(shù)的工作原理及未來發(fā)展分析
汽車AEBS技術(shù)的工作原理及未來發(fā)展分析

AEBS的發(fā)展歷程
說起AEBS,首先就得從車輛制動(dòng)的歷史說起。在汽車工業(yè)的發(fā)展初期,制動(dòng)系統(tǒng)是沒有助力的,制動(dòng)能量完全由駕駛者的作用力來提供,我們可以將這種制動(dòng)系統(tǒng)稱之為“人力制動(dòng)系統(tǒng)”。由于沒有助力,駕駛者需要費(fèi)很大的力氣才能讓車輛停止。基于這樣的現(xiàn)狀,工程師們?cè)O(shè)計(jì)了助力系統(tǒng)。他們?cè)凇叭肆χ苿?dòng)系統(tǒng)”的基礎(chǔ)上加設(shè)了一套動(dòng)力伺服系統(tǒng),采用氣壓能、真空能以及液壓能等作為伺服能量,形成了各種形式的助力器。
再后來,由于很多新手在制動(dòng)時(shí),掌握不好制動(dòng)車的時(shí)機(jī)和力度,不習(xí)慣“點(diǎn)剎”,于是工程師們又加入了被看做是行車安全歷史上最重要的三大發(fā)明之一的“ABS”(防抱死系統(tǒng))。最后大家發(fā)現(xiàn),即便是車輛配備了眾多先進(jìn)的制動(dòng)技術(shù),但前提是駕駛者得有制動(dòng)的動(dòng)作。而現(xiàn)實(shí)的情況是,在遇到突發(fā)情況時(shí),很多駕駛者有些措手不及,還來不及制動(dòng),就已經(jīng)與前車發(fā)生“親密接觸”。于是,便有了AEB(自動(dòng)緊急制動(dòng)系統(tǒng))的誕生。
進(jìn)化后的AEBS
AEBS,即“Advanced Emergency Braking System”的縮寫,意為自動(dòng)緊急制動(dòng)系統(tǒng),可以在檢測(cè)到危險(xiǎn)時(shí)通過 系 統(tǒng) 協(xié) 助 駕 駛 者 進(jìn) 行 制動(dòng),從而避免或減少事故的發(fā)生。AEB也就是我們常聽到的預(yù)碰撞安全系統(tǒng),不同廠商對(duì)這套系統(tǒng)的稱呼有所不同。簡(jiǎn)單來說, AEB就像是你在學(xué)車時(shí),守護(hù)在您身邊的那個(gè)“高度警覺的教練”。教 練 控 制 著 獨(dú) 立 的 制 動(dòng) 踏板,在提醒無效且追尾事故即將發(fā)生之前出手干預(yù),危急情況下及時(shí)踩停,避免發(fā)生事故。所謂“不怕一萬,就怕萬一”,車輛能在緊急情況下自動(dòng)制動(dòng),其重要性不言而喻。
AEBS系統(tǒng)通過攝像頭或雷達(dá)檢測(cè)和識(shí)別前方車輛,在有碰撞可能的情況下先用聲音和警示燈提醒駕駛者進(jìn)行制動(dòng)操作回避碰撞。若駕駛者仍無制動(dòng)操作,系統(tǒng)判斷已無法避免追尾碰撞,就會(huì)采取自動(dòng)制動(dòng)措施來減輕或避免碰撞。同時(shí), AEB系統(tǒng)還包括動(dòng)態(tài)制動(dòng)支持,當(dāng)駕駛者踩下制動(dòng)踏板的力量不足以避免即將到來的碰撞時(shí),就會(huì)為其補(bǔ)充制動(dòng)力。AEB的作用究竟有多大呢?此前Euro NCAP通過對(duì)交通事故的分析發(fā)現(xiàn), 90%的交通事故是由于駕駛者的注意力不集中而引起的,而AEB系統(tǒng)則有效避免或減少事故的發(fā)生。Euro NCAP和ANCAP于2015年5月共同在《Accident Analysis & Prevention》期刊發(fā)表題為“現(xiàn)實(shí)世界追尾碰撞中AEB的有效性”的研究報(bào)告,結(jié)果顯示:AEB技術(shù)能在現(xiàn)實(shí)世界中減少38%的追尾碰撞,且無論是在城市道路(限速60km/h)或郊區(qū)道路行駛的情況下,效果并無顯著差別。
AEBS系統(tǒng)工作原理
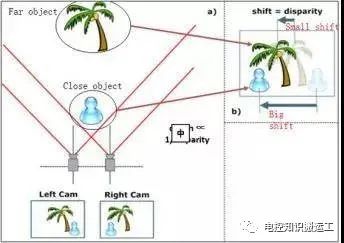
AEBS系統(tǒng)其工作原理很簡(jiǎn)單,主要分為三個(gè)部分:環(huán)境感知、智能決策、執(zhí)行機(jī)構(gòu)。目前環(huán)境感知傳感器部分主要由三種探測(cè)技術(shù),分別是:毫米波雷達(dá)、激光雷達(dá)、視覺識(shí)別。AEBS系統(tǒng)采用雷達(dá)測(cè)出與前車或者障礙物的距離,然后利用數(shù)據(jù)分析模塊將測(cè)出的距離與報(bào)警距離、安全距離進(jìn)行比較。小于報(bào)警距離時(shí)就進(jìn)行報(bào)警提示,而小于安全距離時(shí)即使在駕駛員沒來得及踩制動(dòng)踏板的情況下,通過車載電腦AEBS系統(tǒng)也會(huì)啟動(dòng),使汽車在安全距離內(nèi)自動(dòng)制動(dòng),從而為安全出行保駕護(hù)航。
1.毫米波雷達(dá)
其本質(zhì)為電磁波,其探測(cè)距離遠(yuǎn),波束角較大,探測(cè)范圍寬,用于AEBS時(shí)探測(cè)時(shí),在本車道前方50米左右位置,其探測(cè)寬度已達(dá)3.5米,超出本車道,相鄰車道的車輛容易形成干擾,其抗干擾問題無法解決。另外毫米波對(duì)金屬物體非常敏感,車道前方的任何金屬物體,如易拉罐、窨井蓋等都容易被識(shí)別為障礙物,形成誤報(bào)警、誤剎車;另外對(duì)人體、墻體、樹木等不敏感,所以像類似8.10事故這樣的情況,根本不起作用,無法避免事故的發(fā)生。所以,單純依靠毫米波雷達(dá),干擾大,誤報(bào)、誤剎率高,基本不能使用。

2.攝像頭(視覺識(shí)別)
其本質(zhì)類似于攝像機(jī),通過這個(gè)手段可以直觀識(shí)別前方障礙物情況,但是其探測(cè)距離非常有限,只能短距離探測(cè);探測(cè)距離近,意味著留給駕駛員的反映時(shí)間大大縮短,只能低速防碰撞,無法解決高速情況下發(fā)生重特大交通事故的根本問題。更為關(guān)鍵的是,無法全天候使用,白天對(duì)于太陽光直射情況下,無法識(shí)別;夜晚,對(duì)向車道遠(yuǎn)光燈直射時(shí),引起誤報(bào)。所以,誤報(bào)、漏報(bào)率極高,基本無法使用。
3.毫米波雷達(dá)+攝像頭
兩種傳感器數(shù)據(jù)融合后對(duì)前方車輛或障礙物進(jìn)行判斷,共同認(rèn)為是障礙物后,方可進(jìn)行預(yù)警或制動(dòng),這樣組合使用降低了毫米波的探測(cè)距離,同時(shí)視頻識(shí)別的短板也都全部存在。所以組合方式的缺點(diǎn)是:容易受光線干擾,目標(biāo)識(shí)別不準(zhǔn),誤報(bào)、誤剎、漏剎情況嚴(yán)重;無法解決50km/h以上的高速防碰撞問題。無法實(shí)現(xiàn)遏制重特大交通事故的根本目的。
4.激光雷達(dá)
激光雷達(dá),本質(zhì)屬于光,是不可見光,具備光的所有特性,傳播速度快,探測(cè)距離遠(yuǎn);但缺點(diǎn)是波束角小,相對(duì)盲區(qū)比較大;容易受霧霾、煙霧、灰塵等干擾。若能解決盲區(qū)和抗干擾問題,激光探測(cè)是一種很好的傳感器。智能決策部分,傳感器探測(cè)到相關(guān)數(shù)據(jù)之后,需要處理器處理相關(guān)信息,分析判斷,發(fā)送相應(yīng)指令,預(yù)警或剎車。
AEBS與EBS
那么AEBS和EBS又是什么關(guān)系?AEBS功能是否可以通過EBS系統(tǒng)實(shí)現(xiàn)呢?首先我們要知道,EBS即電子控制制動(dòng)系統(tǒng), 制動(dòng)總泵裝有制動(dòng)踏板傳感器,控制單元接收到踏板信號(hào)后,通過控制前橋模塊、后橋模塊的電磁閥實(shí)現(xiàn)制動(dòng)輸出。與傳統(tǒng)的機(jī)械控制方式相比不僅制動(dòng)響應(yīng)時(shí)間更快,而且能夠?qū)崿F(xiàn)更多的控制功能,如按著軸荷分配制動(dòng)力等。

而AEBS系統(tǒng)通過計(jì)算確認(rèn)有碰撞危險(xiǎn)時(shí),會(huì)向EBS系統(tǒng)發(fā)出制動(dòng)指令,EBS系統(tǒng)負(fù)責(zé)執(zhí)行。需要說明的是AEBS系統(tǒng)也可以和具有ESP功能的ABS系統(tǒng)搭配,并不一定要基于EBS系統(tǒng)進(jìn)行工作,這取決于車輛的實(shí)際配置。通常情況下,如果跟車距離過小、有碰撞危險(xiǎn)時(shí),系統(tǒng)首先點(diǎn)亮黃燈,進(jìn)行警報(bào),如果駕駛員對(duì)警報(bào)做出反應(yīng)、進(jìn)行了減速制動(dòng),碰撞危險(xiǎn)被解除,就不會(huì)促發(fā)制動(dòng)。但當(dāng)駕駛員對(duì)警報(bào)沒有做出反應(yīng)、接管車輛時(shí),才會(huì)觸發(fā)二級(jí)、三級(jí)報(bào)警(紅燈點(diǎn)亮)。紅燈點(diǎn)亮,首先實(shí)施部分制動(dòng),如果駕駛員對(duì)警報(bào)做出反應(yīng)、進(jìn)行了減速制動(dòng),碰撞危險(xiǎn)被解除,就不會(huì)促發(fā)全制動(dòng),但駕駛員對(duì)警報(bào)沒有做出反應(yīng)時(shí),才會(huì)觸發(fā)全制動(dòng)。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2564文章
52788瀏覽量
765301 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4218瀏覽量
192385
原文標(biāo)題:汽車AEBS技術(shù)發(fā)展及工作原理介紹
文章出處:【微信號(hào):智能汽車電子與軟件,微信公眾號(hào):智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
輪邊驅(qū)動(dòng)電機(jī)專利技術(shù)發(fā)展
物聯(lián)網(wǎng)未來發(fā)展趨勢(shì)如何?
光學(xué)傳感器的工作原理與應(yīng)用
工業(yè)電機(jī)行業(yè)現(xiàn)狀及未來發(fā)展趨勢(shì)分析
紅外感應(yīng)技術(shù)的工作原理
熱重分析儀的工作原理是什么
便攜式示波器的技術(shù)原理和應(yīng)用場(chǎng)景
發(fā)電機(jī)的主要工作原理是什么?簡(jiǎn)單分析
汽車發(fā)電機(jī)的工作原理是什么?簡(jiǎn)單分析
電動(dòng)汽車充電樁工作原理介紹
一文讀懂RFID技術(shù)的工作原理及技術(shù)參數(shù)
射頻識(shí)別技術(shù)的工作原理
新能源汽車電機(jī)控制器工作原理
深入解析:汽車水箱氣密性檢測(cè)儀的工作原理與優(yōu)勢(shì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論