 如何快速構建一臺高精度AGV
如何快速構建一臺高精度AGV
隨著科學技術的發展,機器人技術迅速崛起。面對于各行業人口紅利的逐漸消失,各行業掀起一股“機器人”的熱潮。近年電商的發展,促進了物流領域的企業紛紛投入先進機器人技術的研究及應用。以物流行業叉車AGV為例,該如何快速實現叉車AGV產品?如何構建AGV導航控制系統?
一 選擇車載控制器
車載控制器是AGV主要核心,包含導航算法、通信及IO接口、控制邏輯,負責導航和引導等信號數據采集、數據計算、結果儲存、機構控制等功能,目前一般分為PLC、工控機、單片機、專業控制器這幾類。
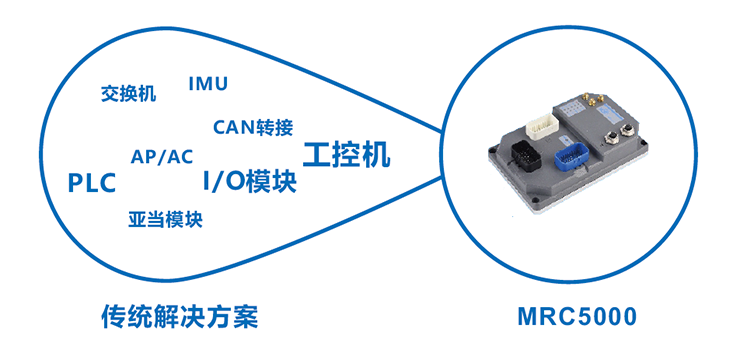
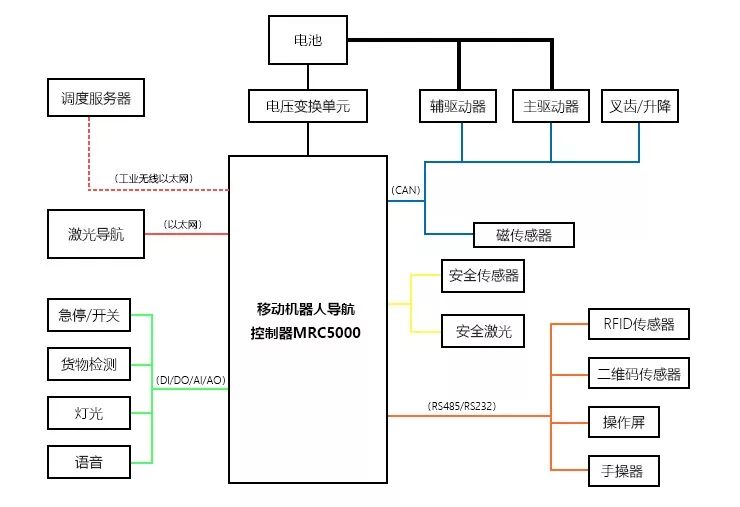
科聰智能MRC5000自主導航控制器,集成了成熟的導航和運動控制算法,符合ICE標準的圖形化二次應用功能開發和部署,穩定性和防護等級更高。MRC5000控制器支持自然導航、激光導航、二維碼導航、磁導航、3D激光導航、混合導航等,
MRC5000控制器自帶豐富I/O資源,傳感器、驅動器可一鍵接入。控制器具備RS-232、RS-485、CAN、以太網等通訊接口,支持CANopen、Modbus RTU 主/從站、Modbus TCP 客戶端/服務器 等標準通訊協議,同時支持自定義協議(可通過車輛設計二次開發)。

二 確定車輛底盤控制
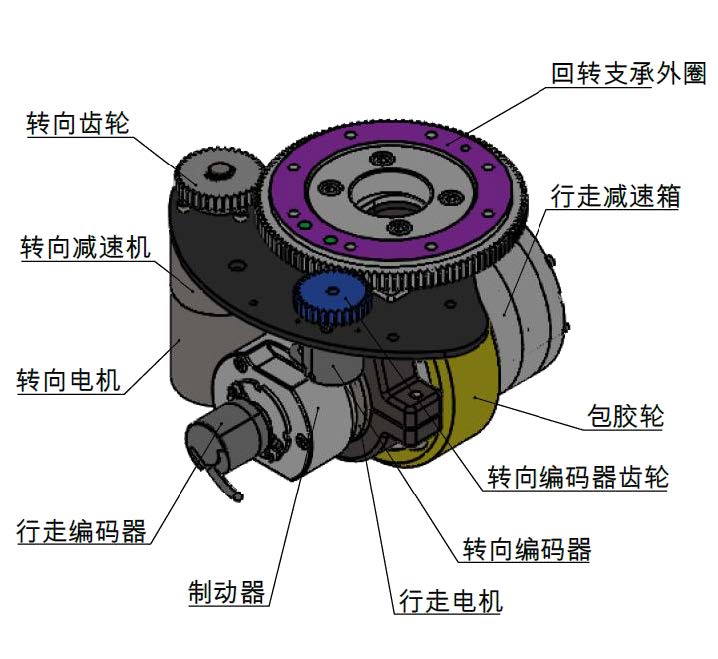
車輛本地一般包含手動操作系統、行走驅動系統、轉向驅動系統、叉齒驅動系統、供電系統,實現車輛行走轉向一般取決于輪系方式、輪胎方式及電機驅動器。
▌輪系方式:單舵輪、雙舵輪、四舵輪、兩驅差速、四驅差速、四驅麥克納姆輪等。
▌輪胎方式:充氣、實心、導電橡膠、麥克納姆。
▌驅動器:柯蒂斯、薩牌、E-Motion、Copley、和利時、MOTEC等
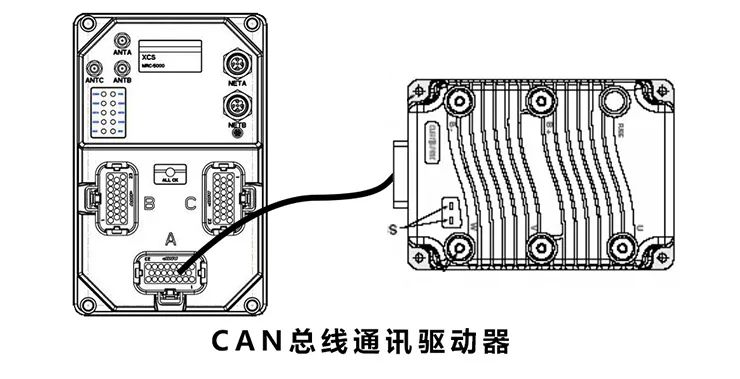
控制器與各品牌驅動器通訊,一般低端驅動器可以用模擬量或者脈沖信號傳遞數據,高端驅動器則采用規范的通信協議傳遞數據(RS-232、RS-485、CAN、以太網)。
以柯蒂斯驅動器為例,MRC5000控制器采用CAN總線通訊方式,CAN總線速度更快、采用差分信號抗干擾穩定性更高、有優先級和仲裁機制更加智能。
三 導航傳感器接入
導航傳感器,一般根據不同的導航方式,會采用磁導航傳感器、激光傳感器、二維碼傳感器等。
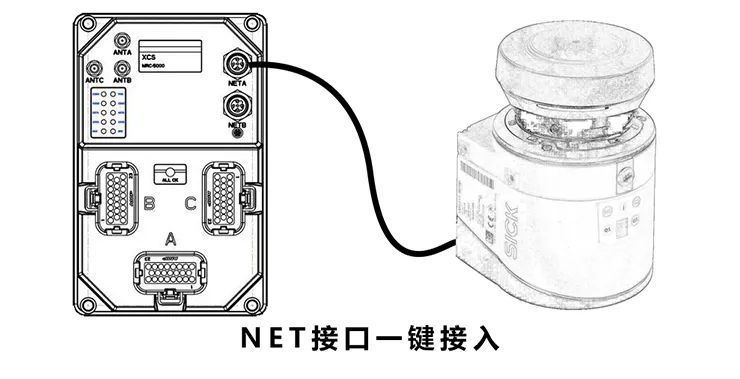
以激光導航為例,目前市面上常用激光品牌有SICK、倍加福等。MRC5000控制器支持全系列SICK激光,可通過以太網接口一鍵接入。
四 相關傳感器接入
其他傳感器包含安全傳感器、叉齒位置傳感器、貨物檢測傳感器、燈光及鳴音系統、自動充電系統。
安全傳感器,根據要求一般由安全激光、防撞觸邊組成。防撞觸邊屬于接觸式,接觸到障礙物才會進行操作,而激光避障采用激光傳感不用接觸障礙物,更加安全。車輛一般這兩種方式會組合使用,提高車輛安全性。
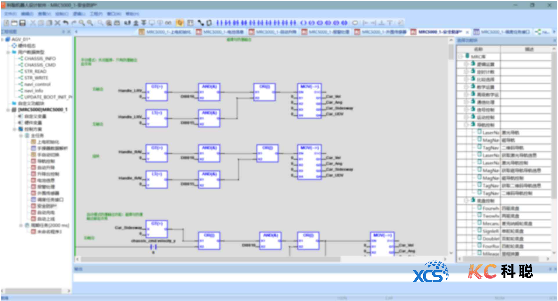
五 機器人軟件使用
MRC控制器配套MRC二次開發平臺 — 機器人設計 xRobotStudio,對移動機器人控制器的各種輸入和輸出進行二次編程,快速實現不同的控制邏輯、應用功能二次開發。軟件提供符合符合IEC 6-1131/3標準,支持三種的可視化編程語言:LD(梯形圖),FBD(功能塊),ST(結構化文本)的圖形化二次開發環境。
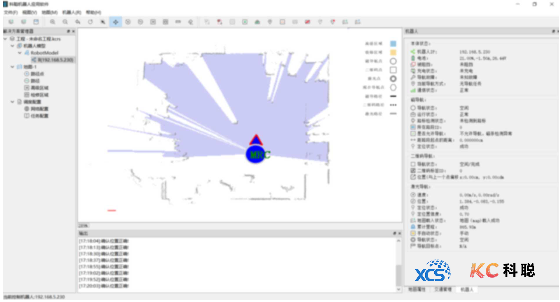
針對不同的應用現場,MRC5000配套機器人實施軟件,快速高效的構建地圖,具備快速編輯、拼接地圖等功能靈活的路徑構建能力,用戶可快速的構建路徑簡單便捷的站點配置功能,建立所需工作點,實現機器人正常工作。
審核編輯 黃昊宇
-
控制系統
+關注
關注
41文章
6662瀏覽量
110908 -
機器人
+關注
關注
211文章
28673瀏覽量
208539 -
AGV
+關注
關注
27文章
1332瀏覽量
41277
發布評論請先 登錄
相關推薦
ads1278高速模式和高精度模式下所能得到的最高精度是多少?
ADC對于10MHz高精度的采樣信號,應該通過什么來構建?
長行程直線滑臺模組如何保持高精度和穩定性?
AGV激光導航定位技術綜述與發展趨勢

類似大疆高精度三軸云臺驅動方案的深度解析
室外重載高精度變速云臺驅動技術方案的深度剖析
鳳凰動力AGV舵輪大揭秘!
P60.X200系列高精度一維壓電納米定位臺應用于光學測量

AGV系統設計解析:布局-車體-對接-數量計算-路徑規劃

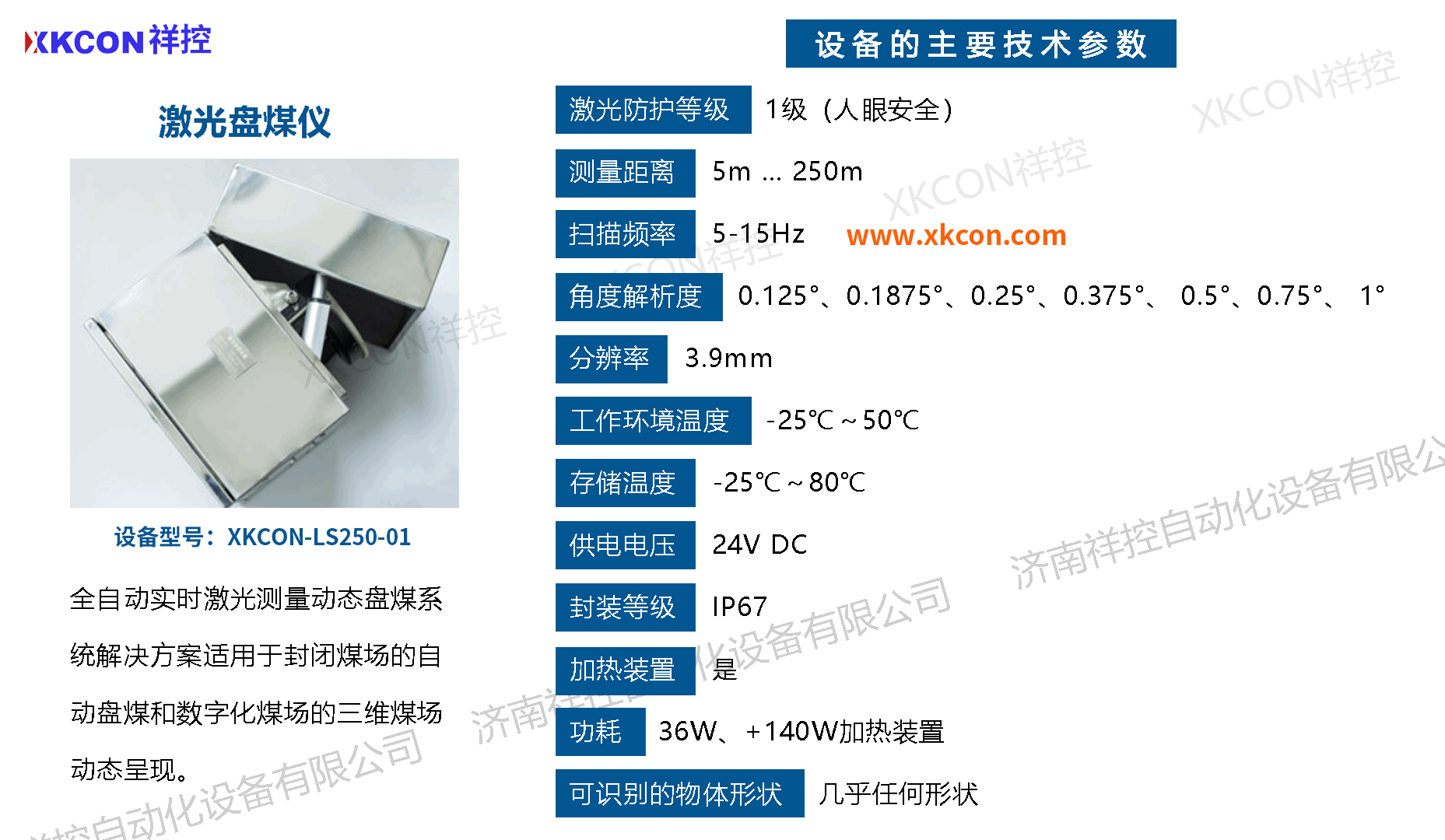
基于三維激光掃描技術的XKCON祥控激光盤煤儀可高精度、快速、全覆蓋盤煤,相對精度優于0.5‰
什么是高精度定位平板?
高精度直線滑臺輕松應對工業自動化高難度挑戰
一個實現高精度、快速建立的大電流好方法

什么是高精度電流源電路原理
Aigtek:如何設計一個高精度電壓源






 工商網監
工商網監
評論