") 智能I/O簡化了無人水下航行器的有效載荷變化要求
智能I/O簡化了無人水下航行器的有效載荷變化要求

隨著軍方繼續(xù)尋找將這些智能機(jī)器用于戰(zhàn)斗、偵察和反地雷任務(wù)的新方法,無人海上車輛的開發(fā)和部署正在迅速擴(kuò)大。無人水下航行器(UUV)制造商正面臨著包括成本、時(shí)間、尺寸、重量和功耗在內(nèi)的關(guān)鍵設(shè)計(jì)挑戰(zhàn)。此外,為現(xiàn)有I/O和通信系統(tǒng)添加功能,特別是擴(kuò)展有效載荷選項(xiàng),是無人駕駛海上車輛的一個(gè)關(guān)鍵設(shè)計(jì)考慮因素。進(jìn)入先進(jìn)的嵌入式計(jì)算架構(gòu),將 I/O 和通信與任務(wù)關(guān)鍵型計(jì)算機(jī)相結(jié)合,無需重新設(shè)計(jì)昂貴的機(jī)箱或背板。這些基于以太網(wǎng)通信的系統(tǒng)可以配置多個(gè) I/O 功能,以滿足不斷變化的有效載荷要求。
無人潛航器成長于公海(盡管淺水威脅也是一個(gè)問題)威脅的時(shí)代。這些車輛更傾向于使用基于COTS的嵌入式系統(tǒng)和模塊化架構(gòu),因?yàn)樾枰叩倪\(yùn)營效率,減少軍事預(yù)算和任務(wù)時(shí)間設(shè)計(jì)限制。
可互換的以任務(wù)為中心的電子設(shè)備是UUV設(shè)計(jì)的標(biāo)志,因?yàn)楹\娙蝿?wù)的性質(zhì)不斷變化 - 水下搜索,海岸防御,海上拒止,封鎖等 - 需要能夠執(zhí)行各種應(yīng)用的替代有效載荷。在這些情況下,模塊化設(shè)計(jì)架構(gòu)使開發(fā)人員免于集成難題,同時(shí)使他們能夠根據(jù)當(dāng)前和未來的任務(wù)要求快速配置系統(tǒng)或機(jī)箱。(圖 1)。
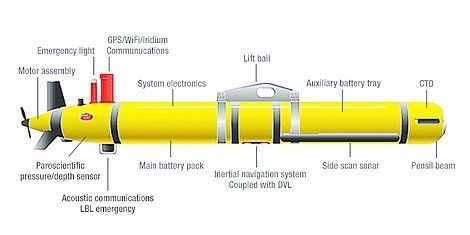
圖1:使用先進(jìn)嵌入式系統(tǒng)的設(shè)計(jì)有助于解決無人水下航行器的尺寸、重量、功耗和成本 (SWaP-C) 挑戰(zhàn)。
換句話說,UUV制造商可以采用基于特定應(yīng)用和標(biāo)準(zhǔn)COTS產(chǎn)品的智能I / O和通信系統(tǒng)和子系統(tǒng),而不是僅僅使用單板計(jì)算機(jī)(SBC),鑒于背板和機(jī)箱設(shè)計(jì)的特定性質(zhì),最終可能導(dǎo)致I/O如何在盒子中連接的不確定性。此外,非經(jīng)常性工程(NRE)成本可能會(huì)飆升,而系統(tǒng)集成商被迫重新認(rèn)證。
因此,毫不奇怪,像Bluefin-21和Knifefish這樣的早期UUV設(shè)計(jì)在使用COTS產(chǎn)品時(shí)依賴于具有模塊化和分布式接口的嵌入式計(jì)算解決方案。嵌入式計(jì)算、能源效率、傳感器、機(jī)器人和位置引導(dǎo)技術(shù)的進(jìn)步現(xiàn)在使海軍能夠用更便宜的全自動(dòng)UUV來增強(qiáng)昂貴的載人系統(tǒng)。
為什么選擇模塊化設(shè)計(jì)?
無人駕駛海上車輛通常由多個(gè)非機(jī)外傳感器組成,包括指南針、多普勒速度記錄儀、慣性導(dǎo)航系統(tǒng)和聲速傳感器,它們以高度自動(dòng)化的方式執(zhí)行搜索、避開或跟蹤操作。首先,車輛需要一個(gè)穩(wěn)定的控制系統(tǒng)來執(zhí)行車輛自主性、任務(wù)規(guī)劃和執(zhí)行、有效載荷數(shù)據(jù)管理以及其他以處理為中心的任務(wù)。
接下來,UUV 需要了解其環(huán)境中的特征,以便它們能夠智能地檢測和分類物品,然后以自動(dòng)方式響應(yīng)傳感器數(shù)據(jù)。在這個(gè)領(lǐng)域,基于低功耗和高性能處理器的車輛控制系統(tǒng)與監(jiān)控傳感器密切合作,使用適當(dāng)?shù)挠行лd荷對(duì)物理或戰(zhàn)術(shù)任務(wù)做出反應(yīng)。
這種復(fù)雜性恰恰表明了控制或處理器部分與傳感器部分之間的連接是多么重要。同時(shí)讀取和仿真數(shù)據(jù)的能力需要強(qiáng)大的處理和I / O功能,這是UUV設(shè)計(jì)中的巨大要求。
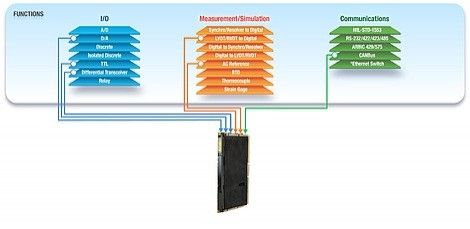
模塊化和高度自適應(yīng)的架構(gòu)(圖2)允許UUV設(shè)計(jì)人員將控制器板添加到現(xiàn)有系統(tǒng),并將其連接到以太網(wǎng)或CAN總線;控制器板將連接到UUV制造商想要支持的任何有效載荷。它必須是一個(gè)靈活且可擴(kuò)展的設(shè)計(jì)解決方案,因?yàn)橹飨到y(tǒng)不能進(jìn)行重大更改。
圖2:模塊化架構(gòu)使UUV設(shè)計(jì)人員能夠?yàn)樘囟ㄓ行лd荷選擇合適的COTS組件,將它們添加到子系統(tǒng)中,并連接到以太網(wǎng)網(wǎng)絡(luò)。
相比之下,創(chuàng)建一個(gè)具有上述所有功能的新盒子可能會(huì)增加設(shè)計(jì)復(fù)雜性并導(dǎo)致額外的 NRE 成本。以為新有效載荷添加新的任務(wù)計(jì)算機(jī)為例:首先,設(shè)計(jì)人員可能不知道如何將舊式傳感器/換能器與新板連接。然后,設(shè)計(jì)師可能不得不重新鑒定整個(gè)盒子,這可能需要幾個(gè)月的時(shí)間。
智能 I/O 功能
無人潛航器可以改變游戲規(guī)則 - 就像無人機(jī)(UAV)在空中一樣 - 通過為海軍艦隊(duì)提供完整的作戰(zhàn)圖景。然而,作為公海的眼睛意味著有大量的水需要監(jiān)測。提供智能多功能I/O和通信功能將成為UUV設(shè)計(jì)的關(guān)鍵要求。
I/O 功能專門針對(duì) UUV 必須攜帶的有效載荷。例如,如果UUV必須處理從以太網(wǎng)到同步/解析器或以太網(wǎng)到CANbus的I/O功能,則必須能夠輕松地為I/O設(shè)備配置多種功能。另一個(gè)例子:以需要使用電阻溫度檢測器(RTD)通道監(jiān)測溫度的UUV為例。
在這種情況下,COTS 模塊化和可配置板使 UUV 設(shè)計(jì)人員能夠快速為這種新有效載荷創(chuàng)建應(yīng)用程序。可配置的 I/O 模塊足夠靈活,可以適應(yīng)具有各種 I/O 設(shè)備的不同有效負(fù)載。此外,對(duì)于UUV上的新有效載荷,系統(tǒng)集成商可以簡單地將預(yù)認(rèn)證板添加到已經(jīng)合格和測試的盒子中。
無人機(jī)設(shè)計(jì)重演
值得注意的是,無人潛航器不一定只是“海上無人機(jī)”,因?yàn)樗鼈冊(cè)诖蠖鄶?shù)情況下不是遠(yuǎn)程駕駛的。與無人機(jī)不同,無人機(jī)天生就能夠很好地從空中獲取無線電信號(hào),海水對(duì)于無線電通信是不透明的;此外,聲音信號(hào)的傳播速度比無線信號(hào)慢。
UUV 是完全自主和高度自動(dòng)化的,這一事實(shí)要求基于基本構(gòu)建模塊(通信、電源管理、數(shù)據(jù)管理和存儲(chǔ))的極其堅(jiān)固可靠的電子設(shè)備。然而,與此同時(shí),UUV 的解剖結(jié)構(gòu)與無人機(jī)設(shè)計(jì)藍(lán)圖非常相似。這一現(xiàn)實(shí)對(duì)海軍工程師來說是一種可喜的解脫。無人機(jī)通過使用COTS組件和模塊化架構(gòu)開創(chuàng)了先例,現(xiàn)在UUV設(shè)計(jì)人員正在效仿,以實(shí)現(xiàn)SWaP-C問題。
使用特定應(yīng)用的標(biāo)準(zhǔn) COTS 系統(tǒng),使工程師能夠通過使用多功能 I/O 和與以太網(wǎng)數(shù)據(jù)集中器的通信來繞過昂貴的機(jī)箱重新設(shè)計(jì)。
顯然,無人潛航器正在重塑海戰(zhàn)的基本基礎(chǔ)。美國海軍承認(rèn)無人潛航器將成為其常規(guī)艦隊(duì)的力量倍增器,并在2016年預(yù)算中為擴(kuò)大其無人潛航器艦隊(duì)分配了大量資金。現(xiàn)在,由設(shè)計(jì)工程師來證明他們可以在不進(jìn)行SWaP-C權(quán)衡的情況下創(chuàng)建創(chuàng)新的電子系統(tǒng)。
審核編輯:郭婷
-
嵌入式
+關(guān)注
關(guān)注
5152文章
19678瀏覽量
317781 -
計(jì)算機(jī)
+關(guān)注
關(guān)注
19文章
7667瀏覽量
90858
發(fā)布評(píng)論請(qǐng)先 登錄
超聲波水下測距換能器:探索水下世界的“千里眼”
GL850G(創(chuàng)惟) USB2.0HUB國產(chǎn)替代方案-GM8220(振芯) P2P
ADP5588移動(dòng)I/O擴(kuò)展器和QWERTY鍵盤控制器技術(shù)手冊(cè)
案例 基于CFD仿真的潛航器不同航行狀態(tài)下阻力特性模擬與評(píng)估
I/O接口與I/O端口的區(qū)別
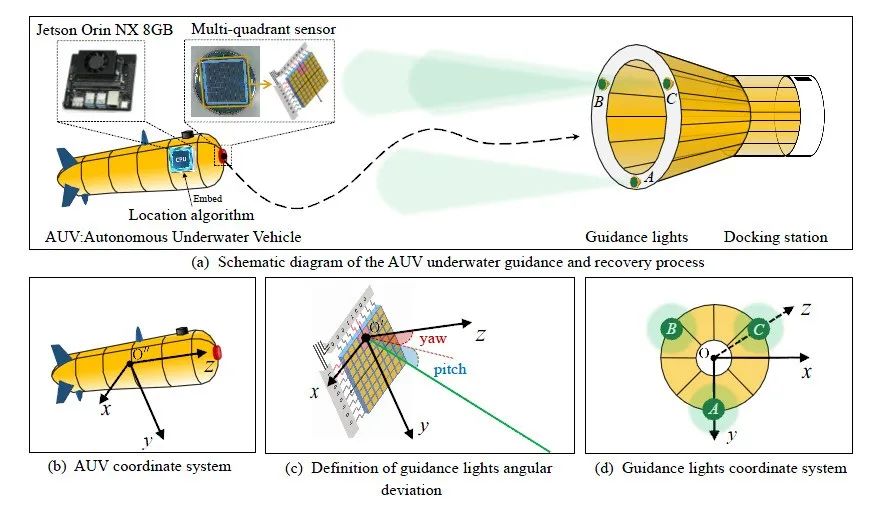
自主水下航行器多分支網(wǎng)絡(luò)光學(xué)導(dǎo)引定位方法
蒙特卡洛仿真揭秘水下光信號(hào)傳輸奧秘
抗輻射FDA作為通信和雷達(dá)有效載荷中的時(shí)鐘緩沖器

使用智能高邊開關(guān)優(yōu)化數(shù)字I/O模塊的電源
物聯(lián)網(wǎng)中常見的I/O擴(kuò)展電路設(shè)計(jì)方案_IIC I/O擴(kuò)展芯片

UCC14240-Q1 簡化了隔離式柵極驅(qū)動(dòng)器的 HEV、EV 偏置電源設(shè)計(jì)
TCAL敏捷I/O擴(kuò)展器的特性





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論