") 案例 基于CFD仿真的潛航器不同航行狀態(tài)下阻力特性模擬與評(píng)估
案例 基于CFD仿真的潛航器不同航行狀態(tài)下阻力特性模擬與評(píng)估
1、簡(jiǎn)述
水下航行器(UUV)作為一種海洋探測(cè)裝備,具備體積小、隱身性好、機(jī)動(dòng)性強(qiáng)、成本低和可組網(wǎng)等優(yōu)點(diǎn)。這些特點(diǎn)使得它們?cè)诤Q筇剿鳌⒖茖W(xué)研究、軍事偵察等領(lǐng)域發(fā)揮著重要作用,其在現(xiàn)代海洋探測(cè)和軍事領(lǐng)域中占據(jù)著越來(lái)越重要的地位。
水下航行器在航行時(shí),會(huì)受到水流的阻力,其在航行過(guò)程中的阻力性能會(huì)影響其快速性, 水下航行器的快速性是評(píng)價(jià)其綜合航行性能的一項(xiàng)重要戰(zhàn)術(shù)技術(shù)指標(biāo)。隨著各種反潛設(shè)備的發(fā)展,水下航行器的航行安全問(wèn)題不容忽視,提高航行器的快速性已經(jīng)成為各國(guó)重要的軍事研究課題,因而對(duì)其阻力的預(yù)報(bào)精度也有了更高的要求,suboff潛艇作為一種常見(jiàn)的水下航行器模型,曾在國(guó)際上被各大海洋強(qiáng)國(guó)進(jìn)行充分的實(shí)驗(yàn)與數(shù)值模擬研究,本文以suboff模型對(duì)水下航行器阻力計(jì)算展開介紹。
2、計(jì)算方法
2.1幾何模型
在本研究中,在數(shù)值模擬中主要考慮的模型為全附體 SUBOFF 模型(配置8)[1]。設(shè)計(jì)的 CAD 模型的尺寸如圖1所示。SUBOFF 模型是一個(gè)軸對(duì)稱船體,總長(zhǎng)度為 4.356 m,等直段最大直徑 D 為 0.508 m。SUBOFF 型號(hào)在船體上方有一個(gè)艦橋,其前緣位于距船頭 0.924 米(1.820D)處,后緣距離 1.293 米(2.545D),因此艦橋的總長(zhǎng)度為 0.368 米(0.724D)。船尾有四個(gè)相同的附件,呈“十”字形布置(垂直和水平控制平面)。
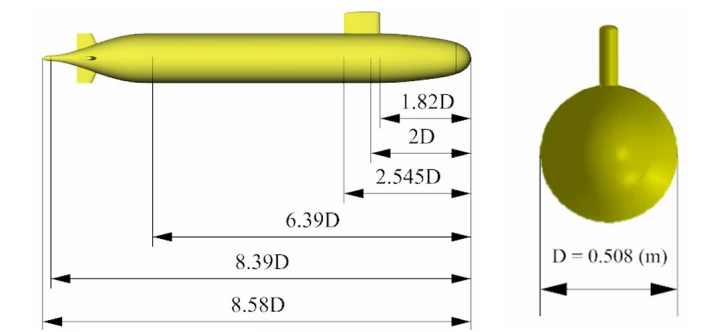 圖 1 具有完全附體suboff潛艇模型/側(cè)視圖(左)和正視圖(右)
圖 1 具有完全附體suboff潛艇模型/側(cè)視圖(左)和正視圖(右)
2.2 數(shù)值方法
在本研究中,數(shù)值模擬的湍流雷諾數(shù)均在107以上,采用了RANS方程求解,其以笛卡爾張量形式書寫的連續(xù)性和動(dòng)量方程分別如下:

其中,ρ 是體積分?jǐn)?shù)平均密度;u 是流動(dòng)速度,可以分解為均值 和波動(dòng)分量u’;p 是壓力項(xiàng);μ 是動(dòng)力粘度。
方程(2)中的最后一項(xiàng)表示湍流的影響,稱為雷諾應(yīng)力。基于 Boussinesq 假說(shuō) [2] 的雷諾應(yīng)力與平均速度梯度相關(guān),能夠以如下公式給出:

其中,μt表示湍流粘度,k表示動(dòng)能,在湍流求解時(shí),需選擇合適的湍流模型,以構(gòu)建μt和k相關(guān)的湍流封閉方程。
3、深水自航
潛艇在深水區(qū)的潛航實(shí)際上是一個(gè)典型的繞流問(wèn)題,對(duì)于繞流問(wèn)題以及關(guān)于阻力問(wèn)題的求解,一般采用的湍流模型為SST k-ω湍流模型,然而在關(guān)于該問(wèn)題的求解中,采用可實(shí)現(xiàn)的k-ε模型較SST k-ω湍流模型所得計(jì)算結(jié)果與實(shí)驗(yàn)值吻合得更好,這可能是流動(dòng)雷諾數(shù)較大引起的。
在計(jì)算過(guò)程中選取的計(jì)算域如下圖 2所示(實(shí)際計(jì)算時(shí)采用半模計(jì)算)。計(jì)算域被設(shè)計(jì)為圓柱形,確保流動(dòng)場(chǎng)的長(zhǎng)度適合捕捉流動(dòng)場(chǎng)特征,例如在任何速度下潛體后面的尾流效應(yīng)。數(shù)計(jì)算域的長(zhǎng)度設(shè)置為23.96米(約為艇長(zhǎng)長(zhǎng)度的5.5倍,即5.5L)。Moon等人[37]指出,對(duì)于潛體的CFD建模,流動(dòng)場(chǎng)的寬度和高度可以設(shè)置為其直徑的七倍(7D)。換句話說(shuō),如果計(jì)算域的高度和寬度都設(shè)置為模型直徑的19倍(19D),數(shù)值流動(dòng)場(chǎng)的模擬結(jié)果將進(jìn)一步確保不受計(jì)算域邊界的影響。同時(shí)圖3顯示了速度入口與壓力出口(B.C.1和B.C.4)作為流體域兩端的進(jìn)/出口邊界條件。同時(shí),在外部流體區(qū)域的外邊界上確定了自由滑移壁(B.C.2)。為了考慮粘性流動(dòng)對(duì)剛體的影響,無(wú)滑移壁邊界條件(B.C.3)應(yīng)用于內(nèi)部流體區(qū)域中的潛體表面。
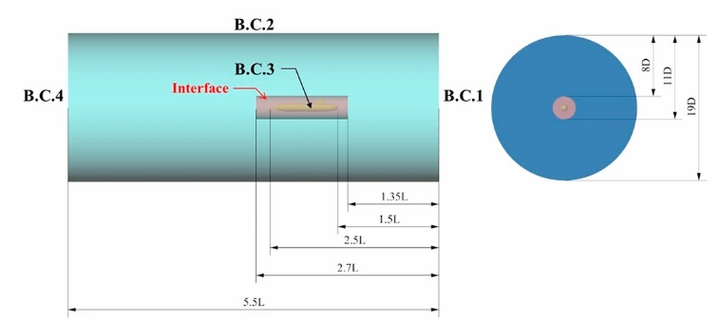 圖 2 計(jì)算域的側(cè)視圖(左)和前視圖(右)
圖 2 計(jì)算域的側(cè)視圖(左)和前視圖(右)
對(duì)于CFD仿真過(guò)程中的網(wǎng)格收斂性問(wèn)題,分別采用了五套不同的網(wǎng)格參數(shù)進(jìn)行計(jì)算驗(yàn)證,表 1給出了五套不同網(wǎng)格的計(jì)算結(jié)果,可以發(fā)現(xiàn)給定的五套網(wǎng)格計(jì)算結(jié)果的最大偏差在0.6%,最終選用的網(wǎng)格為網(wǎng)格3,圖 3給出了艇體壁面網(wǎng)格、艇體附近對(duì)稱面以及圍殼前緣的壁面網(wǎng)格示意簡(jiǎn)圖。
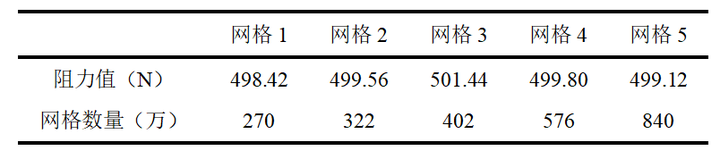 表 1 網(wǎng)格收斂性驗(yàn)證
表 1 網(wǎng)格收斂性驗(yàn)證 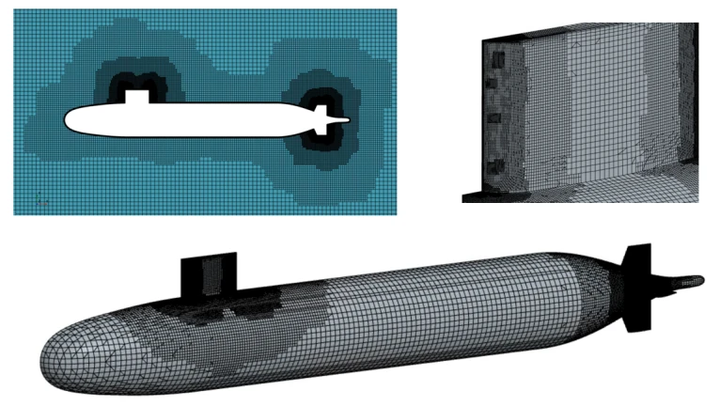 圖 3 網(wǎng)格示意簡(jiǎn)圖
圖 3 網(wǎng)格示意簡(jiǎn)圖
圖 4給出了各不同航速下,計(jì)算值與實(shí)驗(yàn)值的對(duì)比圖,具體數(shù)據(jù)可見(jiàn)表 2,可以發(fā)現(xiàn)各航速下計(jì)算值均比實(shí)驗(yàn)值偏小,最大偏差在5%以內(nèi)。
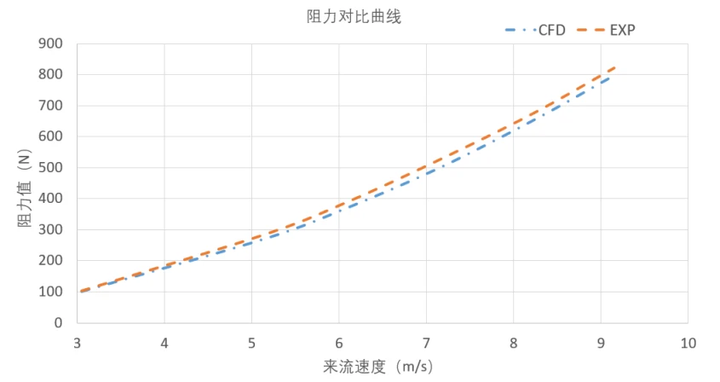 圖 4 計(jì)算值與實(shí)驗(yàn)值對(duì)比曲線
圖 4 計(jì)算值與實(shí)驗(yàn)值對(duì)比曲線 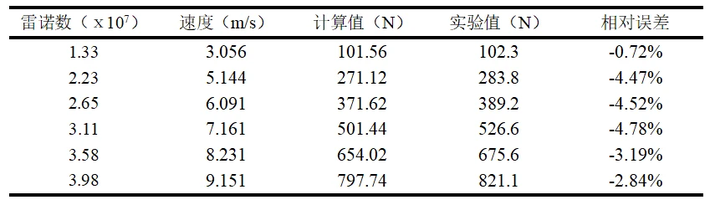 表 2 計(jì)算值與實(shí)驗(yàn)值數(shù)據(jù)對(duì)比
表 2 計(jì)算值與實(shí)驗(yàn)值數(shù)據(jù)對(duì)比
圖 5給出了不同航速下,艇體上的壓力分布以及中心對(duì)稱面上的速度分布,從圖中不難發(fā)現(xiàn),航行速度的變化對(duì)淹沒(méi)艇體周圍的壓力分布影響不大。壓力最高的區(qū)域是艇體頭部、圍殼的前緣和尾舵的前緣。此外,在流速加快的地方,如艇體頭部、圍殼和尾舵附近,觀察到了低壓區(qū),而在中部區(qū)域沒(méi)有明顯的壓力變化。
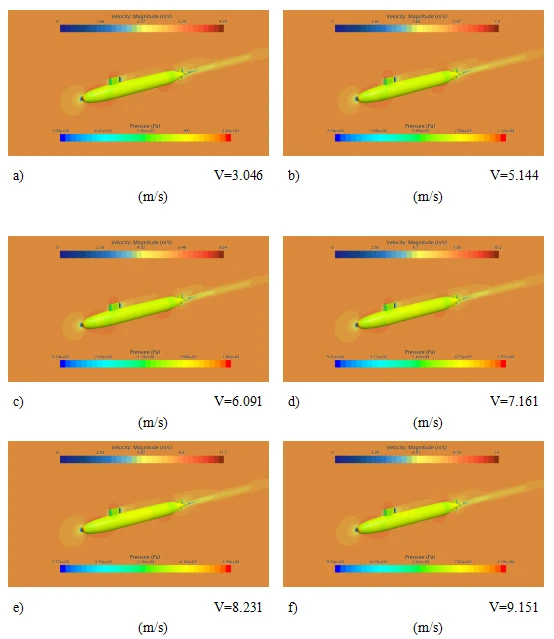 圖 5 不同航速下,艇體上的壓力分布以及中心對(duì)稱面上的速度分布
圖 5 不同航速下,艇體上的壓力分布以及中心對(duì)稱面上的速度分布
4、水面附近的自航
潛艇水面附近的自航可以分為水面下自由航行與水面上自由航行,其區(qū)別為艇體部分是否存在裸露于空氣中的部分,其計(jì)算域如下圖 6所示。
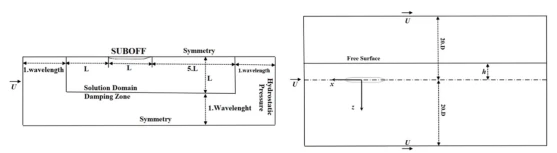 圖 6 潛艇水面附近自航計(jì)算域示意圖(h> 0:水下,h<0:水上)
圖 6 潛艇水面附近自航計(jì)算域示意圖(h> 0:水下,h<0:水上)
其中波長(zhǎng)的計(jì)算可以由以下公式計(jì)算得出,當(dāng)Fr=0.462,L=4.356m時(shí),計(jì)算得到的波長(zhǎng)λ=5.842m。

由于僅找到了裸艇體在水面下自航時(shí)的實(shí)驗(yàn)數(shù)據(jù),因此以裸艇體模型展開計(jì)算與實(shí)驗(yàn)進(jìn)行對(duì)比,表3給出了計(jì)算值與實(shí)驗(yàn)值的結(jié)果對(duì)比,計(jì)算值較實(shí)驗(yàn)值吻合較好,計(jì)算值偏小約7%。圖7給出了對(duì)應(yīng)的自由液面位置云圖。
 表 3 計(jì)算值與實(shí)驗(yàn)值的結(jié)果對(duì)比(裸艇體)
表 3 計(jì)算值與實(shí)驗(yàn)值的結(jié)果對(duì)比(裸艇體) 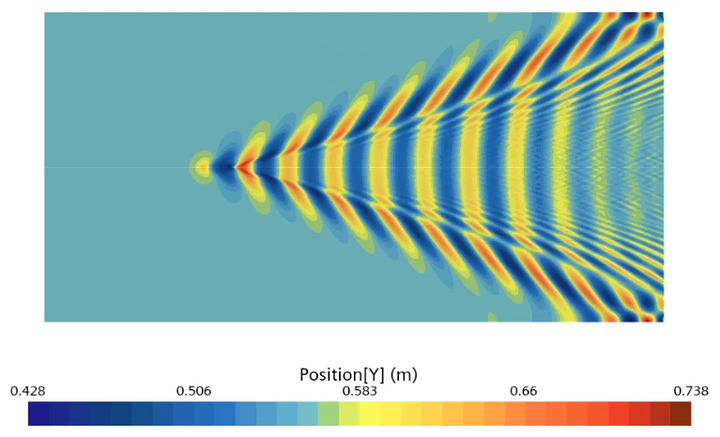 圖 7 自由液面位置云圖(水下)
圖 7 自由液面位置云圖(水下)
同樣的,采用相同的方式對(duì)全附體模型建模,計(jì)算其水面上自由航行情況下的自由液面位置如下圖 8所示。
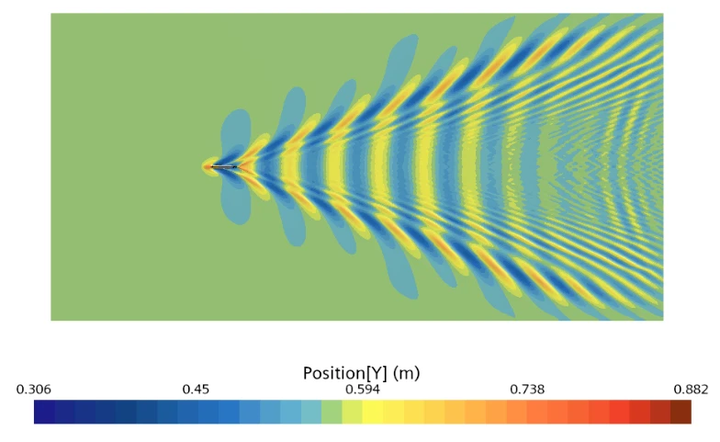 圖 8 自由液面位置云圖(水上)
圖 8 自由液面位置云圖(水上)
參考文獻(xiàn)
[1] Roddy, R.F. Investigation of the Stability and Control Characteristics of Several Configurations of the DARPA SUBOFFModel (DTRC Model. 5470) from Captive-Model Experiments; David Taylor Research Center Bethesda MDShipHydromechanics Dept: Annapolis, MD, USA, 1990.
[2] Hinze, J. Turbulence; McGraw-Hill Publishing Co.: New York, NY, USA, 1975.
審核編輯 黃宇
-
仿真
+關(guān)注
關(guān)注
51文章
4245瀏覽量
135385 -
CFD
+關(guān)注
關(guān)注
1文章
150瀏覽量
18860
發(fā)布評(píng)論請(qǐng)先 登錄
詳析模擬與數(shù)字微波移相器的工作原理及特性
機(jī)翼油箱晃動(dòng)CFD仿真:VirtualFlow如何應(yīng)對(duì)復(fù)雜幾何和多相流挑戰(zhàn)?
【Simcenter FLOEFD】利用完全嵌入CAD的CFD軟件,幫助設(shè)計(jì)師盡早評(píng)估流體流動(dòng)和傳熱,從而縮短開發(fā)時(shí)間

交流回饋老化測(cè)試負(fù)載的詳細(xì)介紹

積鼎CFD:污水處理仿真技術(shù)創(chuàng)新,共筑綠色水環(huán)境
【Simcenter STAR-CCM+】通過(guò)快速準(zhǔn)確的CFD仿真加速空氣動(dòng)力學(xué)創(chuàng)新
DAC7811在哪種錯(cuò)誤狀態(tài)下,或者錯(cuò)誤的控制下會(huì)輸出正壓?jiǎn)幔?/a>
DAC7554模擬與數(shù)字混用,輸出的信號(hào)質(zhì)量靠譜嗎?
VFE2000設(shè)備長(zhǎng)時(shí)運(yùn)行狀態(tài)記錄儀
Simcenter STAR-CCM+車輛外部空氣動(dòng)力學(xué)特性——通過(guò)快速準(zhǔn)確的CFD仿真加速空氣動(dòng)力學(xué)創(chuàng)新

“CFD+水務(wù)”,積鼎通用流體仿真軟件VirtualFlow助力水處理能力提升

在飽和狀態(tài)下運(yùn)行UCC2888x離線降壓以降低成本

使用TPA3255做純模擬輸入的功放,沒(méi)有加MCU第18腳RESET懸空的狀態(tài)下能否工作?
KMPHM振動(dòng)在線監(jiān)測(cè)系統(tǒng)智能評(píng)估設(shè)備運(yùn)行狀態(tài)!

ON狀態(tài)下高壓側(cè)開關(guān)開路負(fù)載檢測(cè)應(yīng)用說(shuō)明





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論