") MATLAB在自動(dòng)駕駛領(lǐng)域的應(yīng)用開發(fā)和最佳實(shí)踐
MATLAB在自動(dòng)駕駛領(lǐng)域的應(yīng)用開發(fā)和最佳實(shí)踐

高級(jí)駕駛輔助系統(tǒng)(ADAS)和全自動(dòng)駕駛(AD)正在推動(dòng)汽車行業(yè)的創(chuàng)新,改變交通運(yùn)輸?shù)姆椒矫婷妫瑥娜粘Mㄇ诘介L(zhǎng)途卡車運(yùn)輸。這個(gè)新興的大趨勢(shì)重新定義了傳感器和計(jì)算平臺(tái)的需求,導(dǎo)致了深度學(xué)習(xí)、傳感器融合、激光雷達(dá)和 V2X 等新技術(shù)的發(fā)展。此外,隨著復(fù)雜度和場(chǎng)景數(shù)量急劇增加,ADAS/AD 應(yīng)用開發(fā)在測(cè)試驗(yàn)證方面存在著諸多挑,
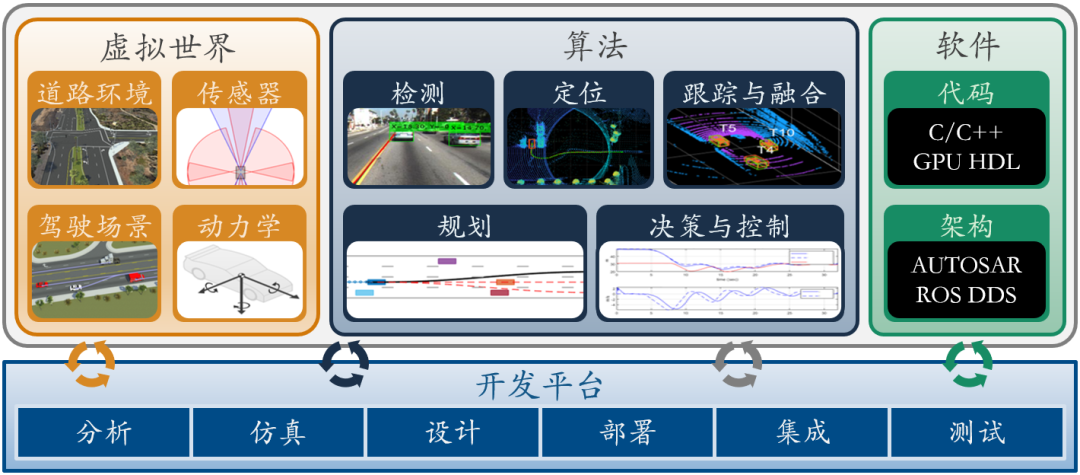
MATLAB、Simulink 和 RoadRunner 開發(fā)平臺(tái)為計(jì)算機(jī)視覺、雷達(dá)、激光雷達(dá)處理、傳感器融合、路徑規(guī)劃和控制、虛擬場(chǎng)景創(chuàng)建和軟件實(shí)現(xiàn)等提供了許多參考示例、預(yù)構(gòu)建算法、工作流以及完備工具鏈,可以加速自動(dòng)駕駛系統(tǒng)功能的開發(fā)。
本次研討會(huì)將由 MathWorks 工程師介紹 R2022a 和 R2022b 中自動(dòng)駕駛的新特性和示例。同時(shí),一汽解放的客戶嘉賓將分享使用 MATLAB 和 RoadRunner 實(shí)現(xiàn)激光雷達(dá)SLAM和高精地圖制作的應(yīng)用實(shí)踐。會(huì)議時(shí)間:11月29日 13:30—16:30
會(huì)議亮點(diǎn)
1) 使用 MATLAB 開發(fā)視覺和激光雷達(dá) SLAM 系統(tǒng)
本次演講將通過實(shí)例來介紹如何使用 MATLAB 來進(jìn)行基于特征點(diǎn)的視覺SLAM系統(tǒng)的開發(fā),以及基于點(diǎn)云配準(zhǔn)的激光雷達(dá) SLAM 算法的開發(fā)。同時(shí)將展示它們?cè)谧詣?dòng)泊車系統(tǒng)當(dāng)中的應(yīng)用。
2) Lidar SLAM 與限定區(qū)域高精地圖制作高精地圖是低速限定場(chǎng)景自動(dòng)駕駛解決方案中不可少的一環(huán),如何便捷的制作限定區(qū)域的高精地圖就顯得尤為重要。本次演講將分享如何使用MATLAB 自動(dòng)駕駛相關(guān)的工具箱處理激光雷達(dá)點(diǎn)云信息,對(duì)點(diǎn)云進(jìn)行配準(zhǔn),回環(huán)檢測(cè)以及后端優(yōu)化生成點(diǎn)云地圖,并利用 RoadRunner 和生成的點(diǎn)云地圖創(chuàng)建高精地圖。另外,針對(duì)點(diǎn)云全自動(dòng)生成高精地圖(RoadRunner HD Map)的工作流進(jìn)行了嘗試探索。
3) MATLAB 智能駕駛參考示例更新——3D 仿真與智能網(wǎng)聯(lián)在 MATLAB R2022a 和 R2022b 中,更新了很多仿真智能駕駛功能的參考示例,我們將就以下兩方面的示例進(jìn)行分享:
如何將 RoadRunner Scenario 的 3D 場(chǎng)景接入到 Simulink,使用Simulink傳感器模型,測(cè)試 ADAS 法規(guī)場(chǎng)景與高速自動(dòng)駕駛
如何使用 Simulink 仿真 V2X,以及基于 V2V 通信的卡車編隊(duì)駕駛
4) 基于模型設(shè)計(jì)加速自動(dòng)駕駛的 SOA 軟件實(shí)現(xiàn)自動(dòng)駕駛算法的復(fù)雜性要求采用更高性能的處理器和更高抽象度的語(yǔ)言來承載和實(shí)現(xiàn),并引入面向服務(wù)的架構(gòu)來進(jìn)行解耦和分層。本演講將通過以下內(nèi)容的介紹來展示面向服務(wù)的軟件架構(gòu)在自動(dòng)駕駛方向的具體實(shí)現(xiàn)。
自動(dòng)駕駛算法的組成和特點(diǎn)
基于模型設(shè)計(jì)支持 SOA 的新特性
SOA 互操作的概念及案例演示
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2565文章
52861瀏覽量
766174 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4226瀏覽量
192613 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14287瀏覽量
170348
原文標(biāo)題:線上研討會(huì) | MATLAB 在自動(dòng)駕駛領(lǐng)域的應(yīng)用開發(fā)和最佳實(shí)踐
文章出處:【微信號(hào):MATLAB,微信公眾號(hào):MATLAB】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
卡車、礦車的自動(dòng)駕駛和乘用車的自動(dòng)駕駛在技術(shù)要求上有何不同?

淺析4D-bev標(biāo)注技術(shù)在自動(dòng)駕駛領(lǐng)域的重要性
激光雷達(dá)在自動(dòng)駕駛領(lǐng)域中的優(yōu)勢(shì)


劉強(qiáng)東,進(jìn)軍汽車領(lǐng)域# 京東# 自動(dòng)駕駛# 自動(dòng)駕駛出租車# 京東自動(dòng)駕駛快遞車
NVIDIA Halos自動(dòng)駕駛汽車安全系統(tǒng)發(fā)布
沃爾沃與Waabi攜手開發(fā)自動(dòng)駕駛卡車
MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
使用PVA引擎優(yōu)化自動(dòng)駕駛汽車CV開發(fā)流水線

Waymo估值超450億美元,自動(dòng)駕駛領(lǐng)域再掀波瀾
自動(dòng)駕駛汽車安全嗎?

人工智能的應(yīng)用領(lǐng)域有自動(dòng)駕駛嗎






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論