") 激光雷達(dá)在自動駕駛領(lǐng)域中的優(yōu)勢
激光雷達(dá)在自動駕駛領(lǐng)域中的優(yōu)勢

激光雷達(dá)仿真
在自動駕駛系統(tǒng)中,激光雷達(dá)起到了至關(guān)重要的作用,它是實(shí)現(xiàn)高度自動駕駛的關(guān)鍵傳感器之一。激光雷達(dá)通過發(fā)射和接收多束脈沖信號,通過測量ToF(Time of Flight,飛行時(shí)間),從而獲取每一個(gè)發(fā)射光束方向上的距離信息,將空間環(huán)境轉(zhuǎn)化為高密度點(diǎn)云數(shù)據(jù),為自動駕駛算法提供不可或缺的環(huán)境感知信息。雷達(dá)感知數(shù)據(jù)作為自動駕駛算法的重要輸入之一,在仿真平臺中也需要盡可能還原真實(shí)激光雷達(dá)的測量過程,并輸出與算法匹配的點(diǎn)云數(shù)據(jù)。
Sim Pro自動駕駛仿真平臺依托光線追蹤算法,對激光雷達(dá)脈沖的發(fā)射、環(huán)境反射及回波接收過程進(jìn)行全鏈路動態(tài)建模,并結(jié)合激光雷達(dá)參數(shù)設(shè)置,實(shí)現(xiàn)輸出不同種類、型號的雷達(dá)數(shù)據(jù)的功能,為自動駕駛算法的開發(fā)驗(yàn)證、場景測試及性能優(yōu)化構(gòu)筑起高度擬真的數(shù)據(jù)閉環(huán)。
在實(shí)現(xiàn)激光雷達(dá)仿真功能的同時(shí),除了還原雷達(dá)的環(huán)境感知能力以外,還需要體現(xiàn)雷達(dá)的特性。對激光雷達(dá)而言,雨雪天氣干擾,機(jī)械旋轉(zhuǎn)導(dǎo)致的畸變,以及多回波功能等因素,都會對感知結(jié)果產(chǎn)生影響。本文會介紹一些激光雷達(dá)的典型特點(diǎn),并討論如何模擬出這些激光雷達(dá)特有的效果。
一、激光雷達(dá)的優(yōu)勢與特點(diǎn)
激光雷達(dá)在自動駕駛領(lǐng)域中的優(yōu)勢,在于其高精度測量能力與3D信息獲取的屬性。目前市面上常見激光雷達(dá)產(chǎn)品,測量誤差普遍達(dá)到厘米級,能夠更準(zhǔn)確地識別和測量環(huán)境物體的形狀,大小和空間距離。相比于相機(jī)這種視覺感知傳感器,激光雷達(dá)憑借其探測3D深度的功能,對于三維環(huán)境的準(zhǔn)確感知也有極大的幫助。相比于毫米波雷達(dá),激光雷達(dá)輸出的點(diǎn)云密度也相當(dāng)高,這對于感知算法而言是十分友好的。此外,雙回波模式的應(yīng)用,進(jìn)一步增強(qiáng)了激光雷達(dá)對復(fù)雜環(huán)境信息的采集能力。
但是,激光雷達(dá)也存在一些測量上的缺點(diǎn)。例如基于它的光學(xué)原理,激光雷達(dá)對低反射率物體的檢測能力較弱,也可能受到一些環(huán)境光的影響;對于一些機(jī)械式激光雷達(dá),高速運(yùn)動的場景下,因掃描延遲形成的運(yùn)動畸變問題,也會影響其對環(huán)境的感知能力。
二、雙回波模式
激光雷達(dá)的雙回波模式是指在一個(gè)激光點(diǎn)發(fā)射后,可以接收兩個(gè)回波信號。由于激光雷達(dá)發(fā)射的光束數(shù)量固定,在相對較遠(yuǎn)處的點(diǎn)云會比較稀疏,而雙回波模式可以體現(xiàn)光束方向上更多的物體信息。雙回波產(chǎn)生的原因是在物理世界中,激光發(fā)射的光束是一個(gè)錐體而非一條直線,雖然該錐體的張角非常小,但是在一定距離下,仍然可能與多個(gè)物體發(fā)生接觸從而產(chǎn)生多個(gè)回波。相比單回波模式,雙回波模式需要更強(qiáng)的激光發(fā)射功率以避免反射功率過低導(dǎo)致的漏檢測,并且需要更復(fù)雜的信號處理技術(shù)。
在激光雷達(dá)仿真中,由于使用的光追技術(shù)是計(jì)算幾何意義上直線方向與環(huán)境面片的碰撞點(diǎn),對于單回波模式而言,光追技術(shù)可以高效地完成射線方向的數(shù)據(jù)收集,在物理模型計(jì)算后輸出點(diǎn)云。但是對于雙回波模式,每一個(gè)發(fā)射信號可能接收2個(gè)信號,需根據(jù)光束發(fā)散角參數(shù)輸入,設(shè)置更多光追射線并計(jì)算每個(gè)射線回波信號在時(shí)域上的累加。最后對接收信號進(jìn)行峰值篩選,輸出具有高回波功率的兩個(gè)位置。該方案在沿用光追算法設(shè)計(jì)的情況下實(shí)現(xiàn)雙回波模式功能,但需要更多的運(yùn)算資源。
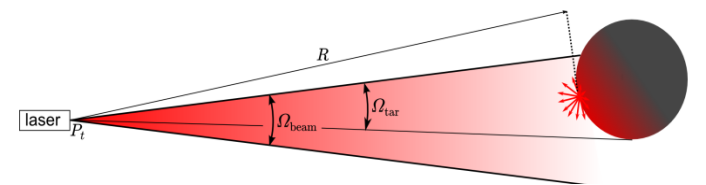
圖:激光發(fā)射的光束是一個(gè)錐體而非一條直線
三、機(jī)械式激光雷達(dá)畸變
隨著激光雷達(dá)技術(shù)的發(fā)展,目前很多最新的激光雷達(dá)都是固態(tài)激光雷達(dá),其掃描的方式不依賴于雷達(dá)本身的旋轉(zhuǎn)。而機(jī)械式激光雷達(dá)則是通過機(jī)械式旋轉(zhuǎn)來對環(huán)境進(jìn)行360度掃描,這就會導(dǎo)致在車輛自身運(yùn)動的同時(shí),雷達(dá)在旋轉(zhuǎn)掃描,當(dāng)雷達(dá)掃描結(jié)束輸出數(shù)據(jù)時(shí),其實(shí)環(huán)境已經(jīng)發(fā)生了變化,由此導(dǎo)致數(shù)據(jù)產(chǎn)生畸變。尤其是在雷達(dá)轉(zhuǎn)速較慢,環(huán)境相對速度快的時(shí)候,畸變會更明顯。
Sim Pro中可以設(shè)置雷達(dá)的類型,并通過設(shè)置機(jī)械式雷達(dá)的轉(zhuǎn)速來控制畸變的產(chǎn)生。目前比較常見的激光雷達(dá)仿真通常是在某一幀內(nèi)同時(shí)發(fā)射所有光追射線并對數(shù)據(jù)進(jìn)行處理,這種方法無法產(chǎn)生畸變效果。考慮到旋轉(zhuǎn)式雷達(dá)的輸出頻率f_lidar遠(yuǎn)低于Sim Pro仿真頻率f_sim,利用畸變產(chǎn)生的原理,在每一個(gè)仿真幀內(nèi)設(shè)置對應(yīng)角度為360°×f_sim/f_lidar的光追射線并保存數(shù)據(jù),激光雷達(dá)旋轉(zhuǎn)一周時(shí)將每一個(gè)仿真幀里儲存的數(shù)據(jù)拼接,即可產(chǎn)生畸變效果。該方法從畸變原理出發(fā),對于分辨率高的雷達(dá),需要極高的仿真頻率才可以得到較為平滑的畸變效果。
四、激光雷達(dá)的輸出數(shù)據(jù)
不同型號的雷達(dá)都可以輸出不同的文件格式,例如pcd,bin,bag等。其中主要包含雷達(dá)檢測的三維信息,即傳感器坐標(biāo)系下的;此外,還可能含有每個(gè)點(diǎn)的強(qiáng)度,反射率,線束數(shù),時(shí)間戳等數(shù)據(jù),這就要求光追算法不僅獲取射線接觸mesh的位置信息,還需要獲取材質(zhì),入射角等信息以便進(jìn)行后續(xù)計(jì)算,這也對場景建模提出了要求——不僅要有準(zhǔn)確的位置信息還需要準(zhǔn)確且豐富的材質(zhì)信息。
值得注意的是,多數(shù)激光雷達(dá)的線束并非均勻分布的,這和激光雷達(dá)的探測重點(diǎn)密切相關(guān),由于自動駕駛汽車更關(guān)注與主車相似高度的環(huán)境,比如周圍車輛,行人,障礙物等,因此在中間區(qū)域會有更為密集的射線覆蓋。針對激光雷達(dá)的這一特點(diǎn),也需要進(jìn)行定制化設(shè)計(jì),以匹配不同型號的激光雷達(dá)。
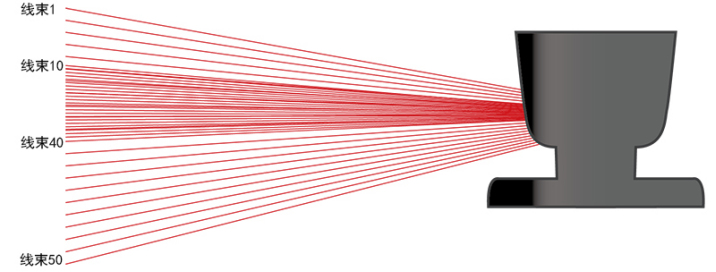
圖:激光雷達(dá)線程角度并不是均勻分布的
激光雷達(dá)數(shù)據(jù)集對于自動駕駛至關(guān)重要,較為傳統(tǒng)的激光SLAM(simultaneous localization and mapping)技術(shù),能夠借助激光點(diǎn)云數(shù)據(jù)對主車位姿進(jìn)行定位;通過實(shí)車采集的點(diǎn)云數(shù)據(jù),可以對環(huán)境進(jìn)行3D建模,從而有助于提高仿真場景的真實(shí)性;而基于點(diǎn)云的3D目標(biāo)識別算法,以及與相機(jī)等其他傳感器的融合感知算法,更是環(huán)境感知中不可或缺的關(guān)鍵技術(shù)。
總結(jié)
激光雷達(dá)仿真對于自動駕駛仿真平臺而言意義重大,自動駕駛的決策算法高度依賴感知模塊的輸出,因此傳感器模塊是仿真平臺不可或缺的關(guān)鍵功能。由于傳感器模塊主要功能為環(huán)境感知,環(huán)境模型也十分重要,對于不同物體的材質(zhì)屬性也需要有明確的定義。Sim Pro自動駕駛仿真平臺能夠根據(jù)激光雷達(dá)的種類,型號,輸入?yún)?shù)等,產(chǎn)生不同格式的點(diǎn)云數(shù)據(jù),以匹配各種點(diǎn)云處理算法對于數(shù)據(jù)的需求。
-
仿真
+關(guān)注
關(guān)注
52文章
4257瀏覽量
135614 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4226瀏覽量
192590 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14282瀏覽量
170317
原文標(biāo)題:Sim Pro自動駕駛仿真平臺激光雷達(dá)仿真
文章出處:【微信號:gh_c85a8e3c0f2a,微信公眾號:賽目科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
自動駕駛只用激光雷達(dá)進(jìn)行感知會有哪些問題?
自動駕駛激光雷達(dá)之間會相互干擾嗎?
激光雷達(dá)在自動駕駛中為何不可替代?

激光雷達(dá)技術(shù)在自動駕駛汽車中的應(yīng)用

愛普生高精度車規(guī)晶振助力激光雷達(dá)自動駕駛

自動駕駛中的激光雷達(dá)是否會傷害人眼?
激光雷達(dá)技術(shù):自動駕駛的應(yīng)用與發(fā)展趨勢

禾賽激光雷達(dá)助力寶馬智能工廠自動駕駛
激光雷達(dá)光電組件的AEC-Q102認(rèn)證:保障自動駕駛硬件的可靠性與品質(zhì)
激光雷達(dá)在自動駕駛中的應(yīng)用
激光雷達(dá)與純視覺方案,哪個(gè)才是自動駕駛最優(yōu)選?
物聯(lián)網(wǎng)系統(tǒng)中的自動駕駛的“眼睛”_純固態(tài)激光雷達(dá)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論