") ARINC 818解決棘手的傳感器融合問題
ARINC 818解決棘手的傳感器融合問題

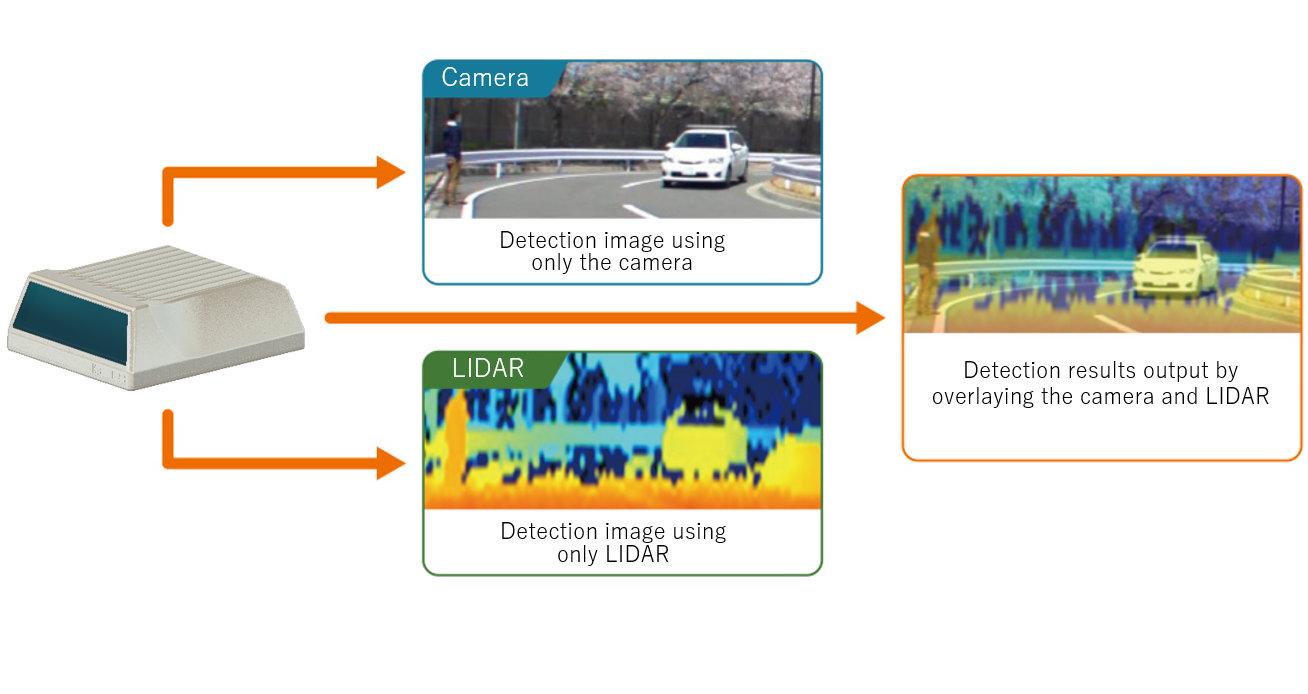
傳感器融合系統(tǒng)在監(jiān)視、目標(biāo)跟蹤和導(dǎo)彈防御等軍事應(yīng)用中繼續(xù)激增,但它們也帶來了傳感器同步、布線重量、距離限制和 EMI 等系統(tǒng)級(jí)挑戰(zhàn)。作者討論了如何將ARINC 818(航空電子數(shù)字視頻總線)用作靈活的傳感器接口來解決這些系統(tǒng)級(jí)問題。此外,還描述了一種雙向ARINC 818系統(tǒng)架構(gòu)方案,用于將多個(gè)傳感器時(shí)間復(fù)用到單根光纖上,并實(shí)現(xiàn)傳感器命令和控制的返回路徑。
隨著傳感器融合系統(tǒng)在增強(qiáng)視覺、監(jiān)視、目標(biāo)跟蹤和導(dǎo)彈防御等應(yīng)用中的激增,從傳感器吊艙遠(yuǎn)程執(zhí)行處理時(shí)存在許多系統(tǒng)級(jí)挑戰(zhàn),包括:傳感器同步、布線重量、距離限制和 EMI。ARINC 818協(xié)議已廣泛用于駕駛艙顯示器等航空航天視頻系統(tǒng),可用作靈活的傳感器接口來解決這些系統(tǒng)級(jí)問題。介紹了一種雙向ARINC 818系統(tǒng)架構(gòu),包括將多個(gè)傳感器時(shí)間復(fù)用到單根光纖上并實(shí)現(xiàn)傳感器命令和控制的返回路徑的方案。
ARINC 818協(xié)議概述
ARINC 818相對(duì)較新,許多工程師還不熟悉該協(xié)議。在描述如何在傳感器融合系統(tǒng)中使用 ARINC 818 之前,對(duì)該協(xié)議的概述將有助于討論。
該標(biāo)準(zhǔn)名為航空電子數(shù)字視頻總線(ADVB),基于光纖通道音頻視頻(FC-AV)標(biāo)準(zhǔn),是對(duì)光纖通道的改編,增加了視頻傳輸功能。但是,F(xiàn)C-AV標(biāo)準(zhǔn)旨在支持非常廣泛的行業(yè)和應(yīng)用,而ADVB則專注于航空電子視頻的關(guān)鍵需求。ADVB 從 FC-AV 簡化而來,無需鏈路初始化、流量控制或其他光纖通道交換(如端口登錄)。ADVB 被定義為單向鏈路,雖然經(jīng)過簡化,但 ADVB 保留了光纖通道的屬性,這些屬性有利于任務(wù)關(guān)鍵型視頻應(yīng)用,例如高速、高可靠性、低延遲和靈活性。
此外,ARINC 818 是一種點(diǎn)對(duì)點(diǎn) 8B/10B 編碼協(xié)議,用于視頻和數(shù)據(jù)的串行傳輸。該協(xié)議是分組的,以視頻為中心,并且非常靈活,支持一系列復(fù)雜的視頻實(shí)現(xiàn),包括將多個(gè)視頻流多路復(fù)用到單個(gè)鏈路上。ARINC 818 和 FC-AV 定義了從 1 Gbps 到 8 Gbps 的鏈路速度,帶寬高達(dá) 800 MBps,可滿足最苛刻的傳感器融合應(yīng)用。
ADVB 數(shù)據(jù)包結(jié)構(gòu)
圖 1 所示的 ADVB 框架是 ARINC 818 的基本傳輸機(jī)制。將這些數(shù)據(jù)包稱為“ADVB 幀”而不是簡單地稱為“幀”非常重要,以消除與視頻幀的潛在混淆。
圖1:ADVB 幀是 ARINC 818 的基本傳輸機(jī)制。

ADVB 幀的開始由幀開始 (SOF) 4 字節(jié)有序集發(fā)出信號(hào),并以幀結(jié)束 (EOF) 有序集終止。每個(gè) ADVB 幀都有一個(gè)由六個(gè) 32 位字組成的標(biāo)準(zhǔn)光纖通道標(biāo)頭。這些標(biāo)頭字與 ADVB 幀原點(diǎn)和預(yù)期目標(biāo)以及序列中的 ADVB 幀位置等內(nèi)容有關(guān)。ADVB 幀標(biāo)頭中的源 ID (SID) 字段允許將來自每個(gè)傳感器的視頻與其他傳感器區(qū)分開來。
“有效負(fù)載”包含視頻、視頻參數(shù)或輔助數(shù)據(jù)。有效負(fù)載的大小可以有所不同,但限制為每個(gè) ADVB 幀 2,112 字節(jié)。為了確保數(shù)據(jù)完整性,所有ADVB幀都具有針對(duì)SOF和CRC字之間的數(shù)據(jù)計(jì)算的32位循環(huán)冗余校驗(yàn)(CRC)。CRC 與為光纖通道定義的 32 位多項(xiàng)式計(jì)算相同。
ADVB容器結(jié)構(gòu)
ARINC 818規(guī)范將“容器”定義為一組用于傳輸視頻的ADVB幀。換句話說,視頻圖像和數(shù)據(jù)被封裝到跨越許多ADVB幀的“容器”中。每個(gè)ADVB幀的“有效載荷”包含數(shù)據(jù)或視頻。在容器中,ARINC 818 定義了包含某些類型數(shù)據(jù)的“對(duì)象”。也就是說,容器中的某些 ADVB 幀是對(duì)象的一部分。在容器中找到的四種類型的對(duì)象如表 1 所示。
表 1:容器中的 ADVB 幀是對(duì)象的一部分,容器內(nèi)有四種類型的對(duì)象。
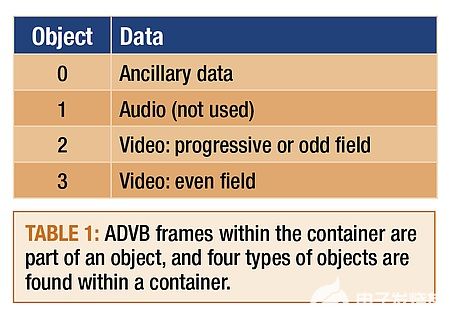
在大多數(shù)情況下,單個(gè)容器精確映射到單個(gè)視頻幀。一個(gè)示例將闡明如何傳輸視頻:要傳輸 XGA 視頻幀(1,024 x 768,24 位顏色),ARINC 818 將總共使用 1,537 個(gè) ADVB 幀。第一個(gè) ADVB 幀的有效負(fù)載保存容器標(biāo)頭信息和輔助數(shù)據(jù);接下來是 1,536 個(gè) ADVB 幀,其中每個(gè) ADVB 幀的有效負(fù)載包含半行視頻。
ARINC 818 傳感器融合接口架構(gòu)
圖2顯示了與三個(gè)傳感器接口的架構(gòu)。傳感器接口模塊與傳感器位于同一位置,用于將來自三個(gè)傳感器的視頻多路復(fù)用到單個(gè)ADVB鏈路上。在此示例中,有兩個(gè)紅外傳感器,每個(gè)傳感器每像素 14 位,分辨率為 640 x 512,頻率為 60 Hz,還有一個(gè) 1,024 x 768 的 24 位彩色光學(xué)傳感器。這些傳感器總共需要 220 MBps 的吞吐量,并且可以多路復(fù)用到單個(gè) 3.1875 Gbps ARINC 818 鏈路上。
圖2:傳感器接口模塊與傳感器位于同一位置,用于將來自三個(gè)傳感器的視頻多路復(fù)用到單個(gè)ADVB鏈路上。
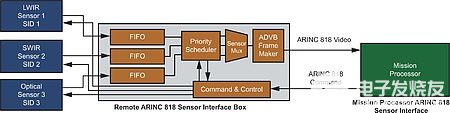
該架構(gòu)包括來自接收器的 ARINC 818 命令和控制路徑。在示例中,命令和控制路徑顯示為ARINC 818,但如果不需要像ARINC 818這樣的高速總線,則可以使用RS-422或類似的數(shù)據(jù)總線來實(shí)現(xiàn)。在此示例中,ARINC 818 (3.187 Gbps) 比 RS-422 (10 Mbps) 快 300 倍以上。
傳感器還可以具有 ARINC 818 接口。可以使用 COTS 轉(zhuǎn)換器板(例如,RS-170 至 ARINC 818)或在 FPGA 中實(shí)現(xiàn)的 ARINC 818 IP 核將 ARINC 818 接口設(shè)計(jì)到傳感器中。
將視頻定時(shí)多路復(fù)用到單個(gè)鏈路上
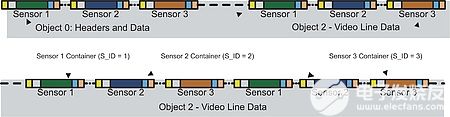
ARINC 818 基于網(wǎng)絡(luò)協(xié)議構(gòu)建,其中數(shù)據(jù)包標(biāo)頭 ID 允許將多個(gè)傳感器多路復(fù)用到單個(gè)光纖上。在單根光纖上多路復(fù)用可減少電纜和連接器的數(shù)量,從而減輕重量。ADVB 標(biāo)頭中的源 ID 字段用于區(qū)分來自不同傳感器的視頻或數(shù)據(jù)。在我們的示例中,SID=1 是 LW 紅外傳感器,SID=2 是 SW IR 傳感器,SID=3 是光學(xué)傳感器。圖3顯示了ADVB幀中的分組視頻線如何在鏈路上交錯(cuò)。
圖3:ADVB 幀中的分組視頻線在鏈路上交錯(cuò)。
命令和控制界面
ARINC 818的主要重點(diǎn)是駕駛艙視頻連接,該標(biāo)準(zhǔn)僅定義了單向鏈路。但是,可以在相反的方向上添加第二個(gè)鏈接以進(jìn)行命令和控制。作為命令和控制鏈路,對(duì)象 0 中的輔助數(shù)據(jù)字段用于小數(shù)據(jù)包(如同步脈沖),而對(duì)象 2 或 3 用于發(fā)送“圖像大小”數(shù)據(jù),例如壞像素替換圖或非均勻性校正 (NUC) 增益和偏移值。命令和控制鏈路的更新速率可能比視頻鏈路快或慢。
通過命令和控制鏈路發(fā)送的典型參數(shù)可能包括:積分時(shí)間、同步信號(hào)、NUC、傳感器模式(待機(jī)、BIT或正常)、測(cè)試碼型、壞像素替換、讀取溫度、像素增益/偏移數(shù)據(jù)以及校準(zhǔn)和測(cè)試碼型數(shù)據(jù)。這些參數(shù)是 ADVB 幀的有效負(fù)載,根據(jù)數(shù)據(jù)類型插入到命令和控制鏈路上的對(duì)象 0、2 或 3 中。
ARINC 818:解決系統(tǒng)級(jí)問題
現(xiàn)在,我們將研究ARINC 818緩解的四個(gè)系統(tǒng)級(jí)挑戰(zhàn):視頻同步以及重量、距離和EMI。
視頻同步
由于傳感器吊艙遠(yuǎn)離融合引擎,復(fù)雜圖像融合處理的第一步需要圖像的時(shí)間同步。目前的方法涉及緩沖來自每個(gè)傳感器的多個(gè)圖像幀,以便圖像處理算法可以將正確的時(shí)間偏移應(yīng)用于存儲(chǔ)的數(shù)據(jù)。但是,緩沖多個(gè)視頻幀會(huì)產(chǎn)生大約 16 毫秒到 48 毫秒的延遲,這對(duì)于平視顯示器 (HUD) 起飛和著陸輔助等時(shí)間關(guān)鍵型應(yīng)用的嚴(yán)格延遲預(yù)算來說可能太多了。
相比之下,ARINC 818返回鏈路提供了一種同步鎖相傳感器的方法,因此接收的圖像數(shù)據(jù)在時(shí)間上將非常緊密地相關(guān)。例如,傳感器接口塊可以使用 OBJ 0 幀的到達(dá)作為傳感器的同步鎖相觸發(fā)器。這可以像在檢測(cè)到每個(gè) SOFi 時(shí)發(fā)送同步鎖相同步脈沖一樣簡單。(SOFi 是序列中的第一個(gè) SOF。但更有可能的是,對(duì)于使用具有不同內(nèi)部延遲(微秒到毫秒)的異構(gòu)傳感器的增強(qiáng)視覺應(yīng)用,傳感器接口盒命令和控制將需要對(duì)傳感器觸發(fā)器應(yīng)用獨(dú)立的延遲。觸發(fā)延遲值可以包含在ARINC 818返回鏈路數(shù)據(jù)中,從而允許接收器直接控制輸入傳感器圖像之間的偏斜。觸發(fā)延遲可以在啟動(dòng)校準(zhǔn)期間設(shè)置,如果需要,可以實(shí)時(shí)更改。這種系統(tǒng)級(jí)方法可以使傳感器圖像在時(shí)間上非常緊密地相關(guān),從而消除了接收器緩沖多個(gè)完整圖像的負(fù)擔(dān)。更重要的是,這種方法將延遲貢獻(xiàn)從全幀時(shí)間(10 毫秒)減少到行時(shí)間(100 微秒)。
重量、距離和電磁干擾
除了視頻同步,ARINC 818在重量、距離和EMI方面也有很多優(yōu)勢(shì)。首先,ARINC 818光纖實(shí)施顯著減輕了系統(tǒng)的重量。例如,如果傳感器吊艙距離圖像處理15米,并且使用典型的銅接口,則將有三組同軸電纜傳輸視頻信號(hào),三組雙絞屏蔽電纜來傳輸RS-422等命令和控制信號(hào)。航空航天級(jí)同軸電纜的電纜重量為15 g/m,扭曲屏蔽為20 g/m。電纜總重量為 1,575 克。ARINC 818系統(tǒng)將包括一個(gè)重達(dá)380克的傳感器接口盒和一個(gè)重15克/米的雙光纖電纜,總重量為605克,重量減輕62%。(連接器不包括在計(jì)算中,因?yàn)榭梢允褂酶鞣N各樣的連接器。
由于ARINC 818使用單模(最遠(yuǎn)10公里)或多模(500米)光纖,因此距離通常不是問題。與CameraLink上的10 M限制或IEEE 1394(Firewire)或DVI上的5 M限制相比,即使是銅纜上的ARINC 818也更勝一籌,在1 Gbps時(shí)的距離為25 M,在2 Gbps時(shí)的距離為15 M。大多數(shù)商業(yè)和軍事航空航天應(yīng)用在多模光纖上使用ARINC 818。光纖布線的另一個(gè)優(yōu)點(diǎn)是抗EMI,它消除了所有銅纜固有的屏蔽需求 使用光纖進(jìn)行ARINC 818等高頻傳輸消除了干擾其他電子設(shè)備的輻射發(fā)射和降低數(shù)據(jù)完整性的EMI敏感性問題。
ARINC 818 有利于現(xiàn)代傳感器融合系統(tǒng)
在傳感器遠(yuǎn)離傳感器融合引擎的傳感器融合系統(tǒng)中,ARINC 818 在同步、帶寬、重量、距離和 EMI 抗擾度方面具有優(yōu)勢(shì)。接口轉(zhuǎn)換器和ARINC 818 IP 核等 COTS 組件有助于在要求苛刻的傳感器融合應(yīng)用中實(shí)施 ARINC 818。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2565文章
52982瀏覽量
767254 -
接口
+關(guān)注
關(guān)注
33文章
9000瀏覽量
153712 -
光纖
+關(guān)注
關(guān)注
20文章
4146瀏覽量
75204
發(fā)布評(píng)論請(qǐng)先 登錄
AGV機(jī)器人如何實(shí)現(xiàn)毫秒級(jí)避障?深度解析多傳感器融合的核心技術(shù)

求助,關(guān)于傳感器融合庫的使用問題求解
融合視覺傳感器廠商銳思智芯完成B輪融資
康謀應(yīng)用 | 基于多傳感器融合的海洋數(shù)據(jù)采集系統(tǒng)

干簧管傳感器屬于什么傳感器
如何利用傳感器融合改進(jìn)工業(yè) 4.0 生產(chǎn)的流程和物流
京瓷發(fā)布全球首款“攝像頭-激光雷達(dá)”融合傳感器
激光雷達(dá)+攝像頭融合傳感器,有沒有搞頭?
多傳感器融合在自動(dòng)駕駛中的應(yīng)用趨勢(shì)探究

自主移動(dòng)機(jī)器人如何實(shí)現(xiàn)傳感器融合
MSP430F5xx系列上使用方向余弦矩陣算法的九軸傳感器融合






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論