") 如何實現(xiàn)Linux環(huán)境和CANoe工具之間的數(shù)據(jù)交互
如何實現(xiàn)Linux環(huán)境和CANoe工具之間的數(shù)據(jù)交互
在汽車軟件的開發(fā)周期中,基于POSIX標準的操作系統(tǒng)(如Linux)廣泛應用于AUTOSAR Adaptive平臺的ECU原型開發(fā)、算法或功能評估中。
該領域的嵌入式軟件開發(fā)人員通常傾向于在運行Linux系統(tǒng)(如Ubuntu/Debian)的虛擬機中進行開發(fā),因為它提供了與嵌入式平臺相似的可訪問的接口和組件。
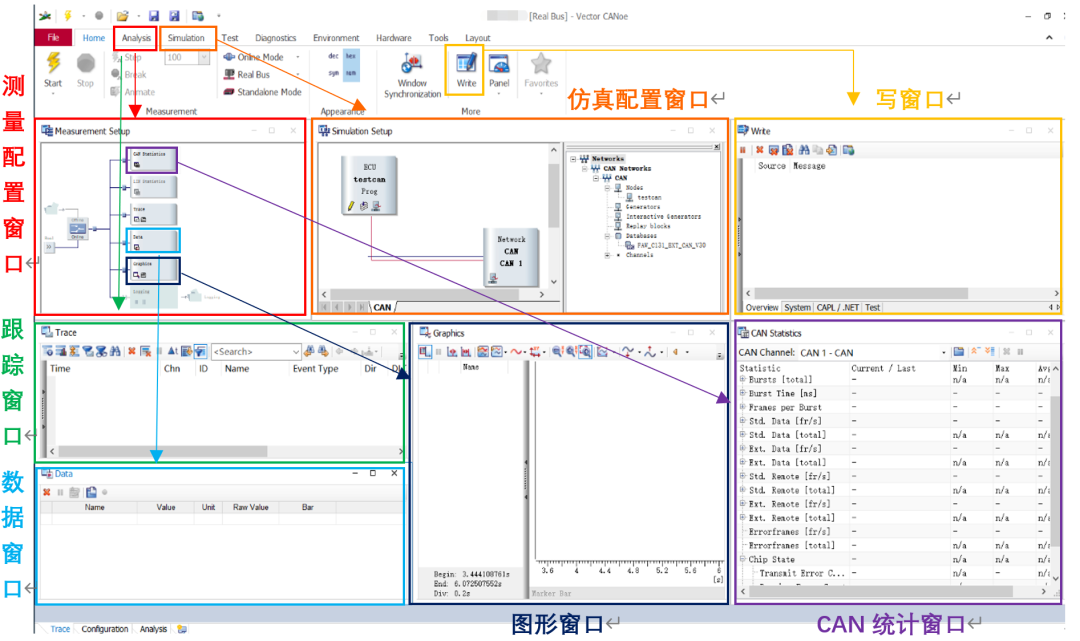
Vector提供的CANoe軟件是進行網(wǎng)絡/總線和ECU開發(fā)、測試和分析的全面工具,支持總線網(wǎng)絡開發(fā)從需求分析到系統(tǒng)實現(xiàn)的全過程,包括模型創(chuàng)建、仿真、測試、診斷及通信分析等。
但和大多數(shù)網(wǎng)絡開發(fā)工具一樣只適用于Windows操作系統(tǒng),因此開發(fā)人員需要考慮如何實現(xiàn)Linux環(huán)境和CANoe工具之間的數(shù)據(jù)交互。
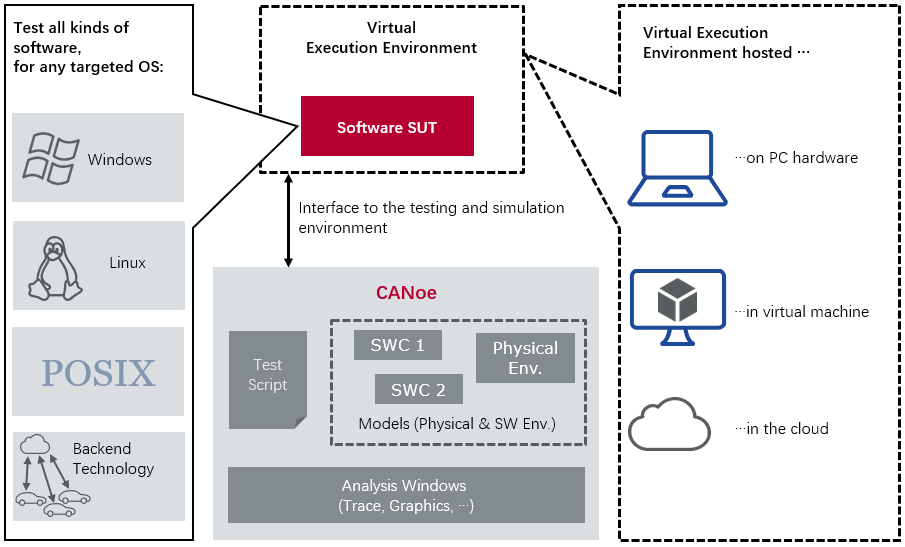
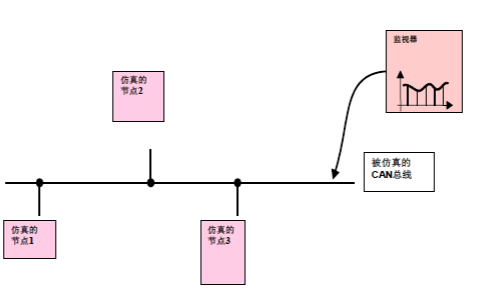
圖1:CANoe與被測軟件的虛擬化執(zhí)行環(huán)境
為了滿足用戶多樣化虛擬執(zhí)行環(huán)境的測試需求,除了CANoe以外,Vector還提供了專注于SIL測試的CANoe4SW,可以對軟件組件、軟件子系統(tǒng)以及整個軟件系統(tǒng)進行開發(fā),測試和分析。
以及面向服務器版本的CANoe4SW SE(CANoe4SW Server Edition),支持Linux或Windows服務器環(huán)境運行CANoe工程,支持Docker容器化運行。
本文主要介紹CANoe與虛擬機通過以太網(wǎng)交互的幾種常用方法。
01
Shared Networking
共享意味著CANoe和被測應用程序共享主機的TCP/IP協(xié)議棧,這種方式在使用WSL(Windows Subsystem for Linux)時最為便捷。WSL有WSL2和WSL1兩個版本,主要區(qū)別在于WSL2使用了真實的 Linux 內(nèi)核、支持完整的系統(tǒng)調(diào)用兼容性以及跨 Linux 和 Windows 操作系統(tǒng)的性能。
接下來以WSL2環(huán)境為例演示虛擬機與CANoe基于Shared Networking的通信配置過程。在CANoe端需要創(chuàng)建一個UDP通信節(jié)點,將其TCP/IP Stack配置為使用操作系統(tǒng)的網(wǎng)絡協(xié)議棧,然后通過CAPL函數(shù)創(chuàng)建socket通過本地環(huán)回地址(127.0.0.1)實現(xiàn)UDP報文的發(fā)送和接收;在WSL2端無需特殊配置,可直接通過指令去監(jiān)聽UDP報文并向CANoe發(fā)送UDP數(shù)據(jù)。通信過程如下圖。

圖2: CANoe與WSL2通信過程
這種方式配置簡單,但是無法直接在CANoe的Trace窗口中顯示通信數(shù)據(jù),并且可能會受到主機上其他應用程序的串擾,另外Windows防火墻也可能會抑制通信流量。
Shared Networking同樣也適用于其他的虛擬化工具,如VMware Workstation、Virtual Box等。只是需要一些額外配置,對于其他虛擬化環(huán)境更推薦使用后面介紹的方式。
02
Virtual Ethernet Link
該方式適用于運行Linux虛擬機的各種虛擬化環(huán)境,如VMware Workstation 和Microsoft Hyper-V。接下來以VMware環(huán)境為例介紹其配置過程。
安裝Vector Network Driver
在CANoe的安裝路徑下包含有該驅(qū)動的安裝程序(參考路徑:C:Program FilesVector CANoe 16.3.110Installer Additional ComponentsVector Network Driver),以管理員權限安裝即可。
安裝Microsoft環(huán)回適配器
在Window搜索欄中輸入“hdwwiz”打開添加硬件配置選項,選擇手動從列表中選擇硬件安裝,在硬件類型中選擇“網(wǎng)絡適配器”,在下一步中廠商選擇“MicroSoft”,型號選擇“Microsoft KM-TEST環(huán)回適配器”進行安裝。
安裝完成之后就可以在PC的網(wǎng)絡連接中查看到Microsoft環(huán)回適配器了。
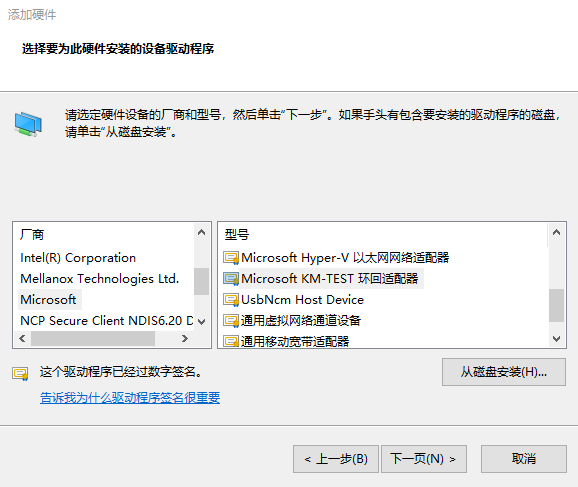
圖3:安裝環(huán)回適配器
將Microsoft環(huán)回適配器映射到VM
打開VMware Workstation,在編輯菜單下打開虛擬網(wǎng)絡編輯器,選擇VMnet0并將其橋接到Microsoft環(huán)回適配器。

圖4:配置橋接模式
配置CANoe使用Microsoft環(huán)回適配器
在CANoe界面,Hardware -> Network Hardware-> Ehernet channel-> Hardware Type中選擇Microsoft環(huán)回適配器。
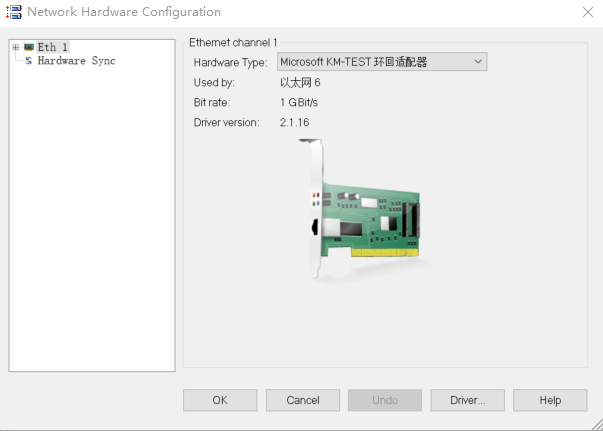
圖5:配置使用網(wǎng)卡
所有配置完成之后,來自CANoe中的以太網(wǎng)數(shù)據(jù)就可以通過映射的以太網(wǎng)鏈路發(fā)送到VMware中,同樣VMware中的以太網(wǎng)數(shù)據(jù)也可以發(fā)送給CANoe。
以VMware中Ubuntu環(huán)境為例,驗證CANoe與Ubuntu之間的通信鏈路,過程如下圖。

圖6: CANoe與Ubuntu通信過程
03
TUN/TAP Server
CANoe從15.0版本開始,新增了Virtual Link(TUN/TAP)功能,支持使用TUN/TAP設備驅(qū)動程序?qū)M虛擬的網(wǎng)絡設備連接到CANoe進行仿真。這種模式的通信是雙向的,并且CANoe支持工作在真實總線及仿真總線模式下。
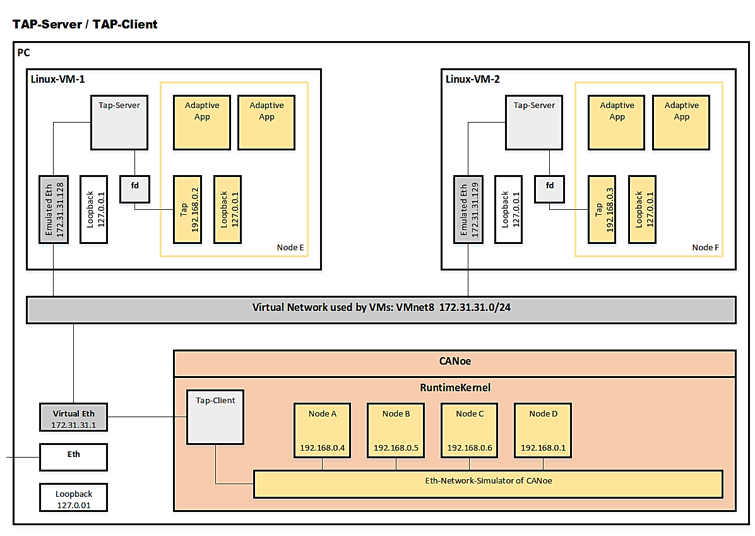
圖7: TAP功能示意
主要配置過程如下。
配置TUN/TAP Server
一是需要在本地Linux環(huán)境中編譯TAP server,二是編譯完成后需要在VM中創(chuàng)建虛擬的TAP設備,具體過程可以參考CANoe幫助文檔的說明。
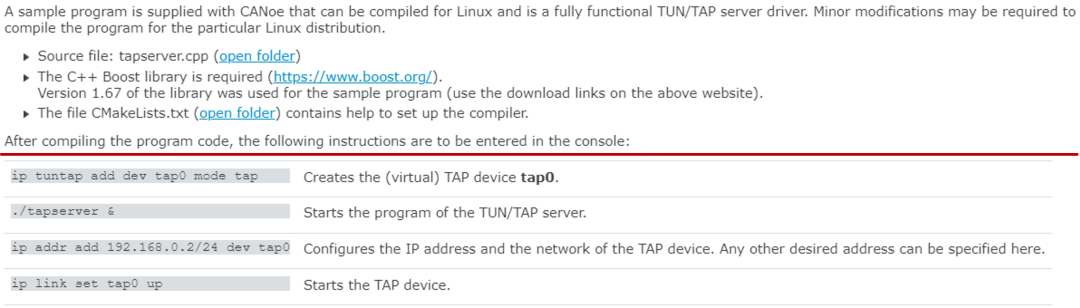
圖8:TAP server配置
以VMware中CentOS7環(huán)境為例,演示下TAP server配置的具體過程:
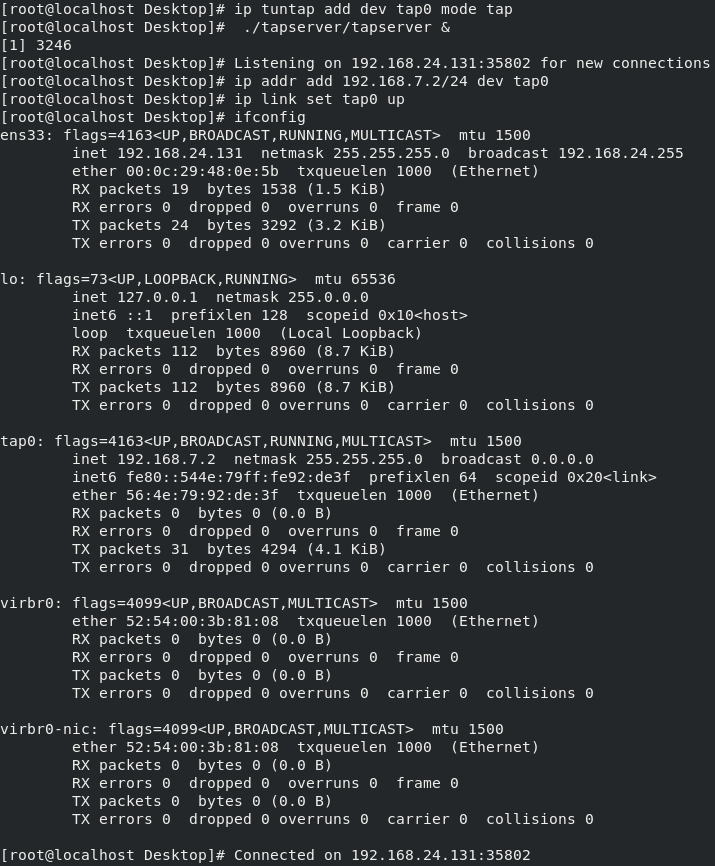
圖9: CenOS7中TAP server配置示例
CANoe中激活Virtual Link
在CANoe中打開Option頁面,激活virtual link并選擇TAP server映射的網(wǎng)絡。
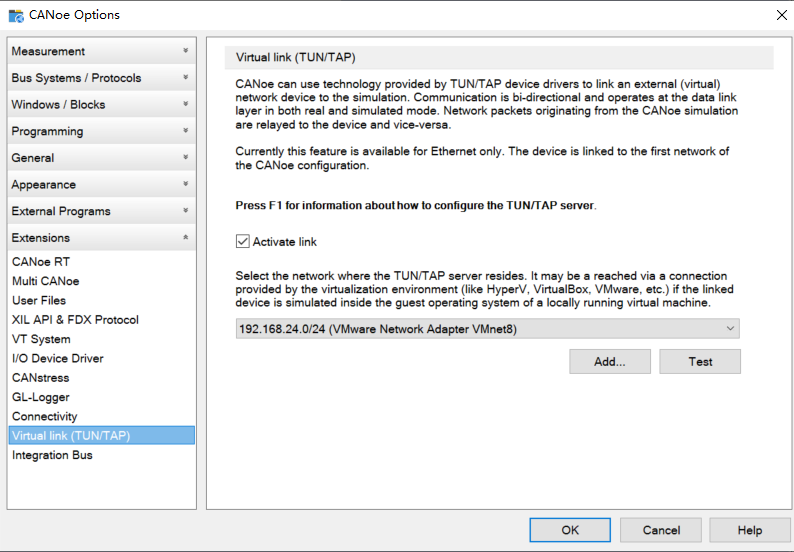
圖10:CANoe中激活TAP server配置
CANoe中UDP通信配置
在CANoe中創(chuàng)建一個UDP通信節(jié)點,配置其TCP/IP stack信息。
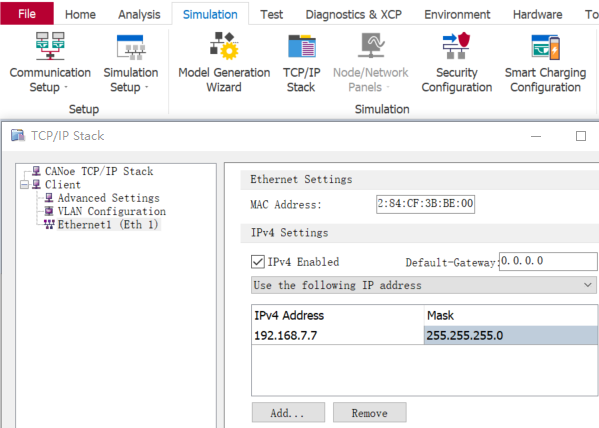
圖11:TCP/IP stack配置
所有配置完成后,運行CANoe就可以在write窗口查看到“Tap Server Discovery on 192.168.24.255:33000”及“Connected to Tap Server 192.168.24.131:35802”的信息,表明CANoe與TAP server端的配置已經(jīng)完成并建立了連接。為了驗證虛擬機與CANoe之間的通信,可以通過Ping指令或者UDP API去進行驗證,結果如下。

圖12: CANoe與TAP server通信過程
審核編輯:劉清
-
AUTOSAR
+關注
關注
10文章
372瀏覽量
22413 -
虛擬機
+關注
關注
1文章
962瀏覽量
29074 -
CANoe總線
+關注
關注
0文章
4瀏覽量
995
原文標題:CANoe與虛擬機
文章出處:【微信號:VectorChina,微信公眾號:Vector維克多】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
在CanoE和TC3x7應用套件之間建立通信,如何實現(xiàn)通過串行通信從CanoE收到的數(shù)據(jù)幀?
CANoe:網(wǎng)絡和ECU開發(fā)、測試和分析的專業(yè)工具
CANoe怎么實現(xiàn)數(shù)據(jù)采集
如何實現(xiàn)單片機和電腦之間的信息交互
基于Linux的RFID交互系統(tǒng)的設計與實現(xiàn)

CANOE教程之CANOE的使用手冊免費下載
嵌入式Linux開發(fā)環(huán)境搭建-5-Windows環(huán)境下相關工具的使用

CANoe軟件的介紹
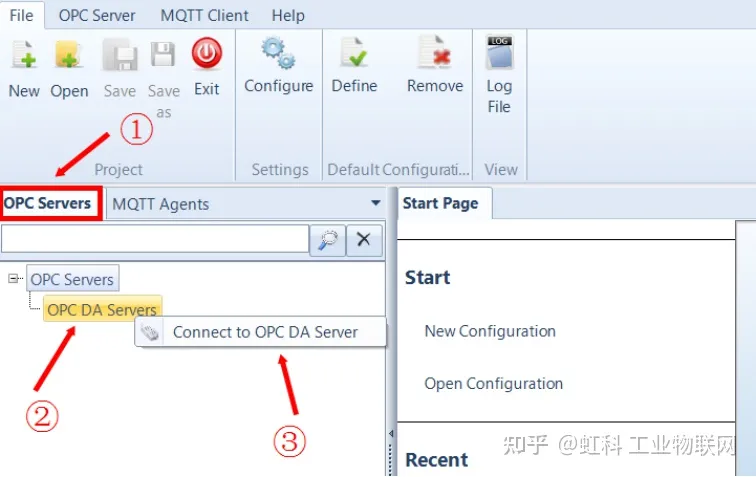
如何實現(xiàn)OPC DA Server和MQTT Broker之間的數(shù)據(jù)交互?
淺談CANoe實現(xiàn)SOA仿真測試
CANoe集成解決方案
CANOE工具使用教程
基于Linux的RFID交互系統(tǒng)的設計實現(xiàn)方案
PLC之間的IO交互怎么實現(xiàn)
CANoe仿真HTTP節(jié)點的實戰(zhàn)秘籍大公開






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論