") 自動(dòng)駕駛系統(tǒng)時(shí)間同步的前世今生
自動(dòng)駕駛系統(tǒng)時(shí)間同步的前世今生
時(shí)間同步的重要性在生活中已經(jīng)充分體現(xiàn)。試想你因一個(gè)姑娘在酒吧和別人大打出手,并約定下周六早上九點(diǎn)在后海小樹(shù)林里進(jìn)行群體活動(dòng)。為此你微信召集了在南非、印度、泰國(guó)干建筑的好兄弟。可在你如期赴約的時(shí)候,發(fā)現(xiàn)隊(duì)友只有河畔的孤影。當(dāng)你在病床上睜開(kāi)雙眼的時(shí)候,看到了你好兄弟們愧疚的黑黢黢的臉龐,原來(lái)他們忘記考慮時(shí)差了。
自動(dòng)駕駛系統(tǒng)更是如此,身邊的一眾小弟(域控制器、激光雷達(dá)、相機(jī)、毫米波雷達(dá)等)哪個(gè)不是桀驁不馴、性格迥異,想要管理好他們,時(shí)間同步是基礎(chǔ)。家族里的其他域控制器(座艙域、動(dòng)力域、車身域、底盤域等)也需要實(shí)現(xiàn)時(shí)間同步,不然來(lái)你家看個(gè)世界杯,都不能及時(shí)分享國(guó)足進(jìn)球、問(wèn)鼎世界杯冠軍的喜悅。因此自動(dòng)駕駛?cè)谠挼谒钠诰驮敿?xì)介紹自動(dòng)駕駛系統(tǒng)時(shí)間同步的前世今生。
時(shí)間同步背景
兒時(shí),我們都哭過(guò)鬧過(guò)讓父母給我們買過(guò)兒童電子手表,但這個(gè)手表有一個(gè)缺點(diǎn),每過(guò)一段時(shí)間總會(huì)和CCTV的標(biāo)準(zhǔn)時(shí)間存在偏差,因此需要手工校準(zhǔn)。自動(dòng)駕駛里的域控制器和傳感器若都采用內(nèi)置的硬件時(shí)鐘,同樣會(huì)存在不同硬件時(shí)間存在偏差的現(xiàn)象。試想在感知融合階段,左側(cè)車道有一輛時(shí)速80km/h的車輛正準(zhǔn)備超車變道,由于沒(méi)有時(shí)間同步,激光300ms前的點(diǎn)云數(shù)據(jù)與相機(jī)當(dāng)前的圖像數(shù)據(jù)融合。融合時(shí)激光點(diǎn)云數(shù)據(jù)置信度又高于圖像數(shù)據(jù),則決策單元誤判斷為后車沒(méi)有超車行為,繼續(xù)當(dāng)前的行車狀態(tài)或加速行駛,那么下一秒則可能釀成“親人兩行淚”這一悲劇。
除了硬件時(shí)鐘偏差的原因,各種傳感器的采樣頻率也不一致,當(dāng)前激光典型采樣頻率為10HZ,相機(jī)為30fps,高精度組合導(dǎo)航為100HZ。沒(méi)有準(zhǔn)確的時(shí)鐘同步,各傳感器在哪一幀進(jìn)行融合,在哪里進(jìn)行插值都沒(méi)法進(jìn)行判斷。兩個(gè)傳感器即使采樣頻率一致,其每幀數(shù)據(jù)的采樣點(diǎn)也一般不一致。真正應(yīng)了那句,不主動(dòng)求變,那就只能生死由命富貴在天了。
除了自動(dòng)駕駛域需要精確的時(shí)鐘信息外,其他域相關(guān)功能同樣也需要。大屏上實(shí)時(shí)高精地圖顯示;駕駛員實(shí)時(shí)疲勞檢測(cè);實(shí)時(shí)的流媒體后視鏡顯示;車輛與路側(cè)RSU之間的實(shí)時(shí)信息交互,無(wú)一不需要全域架構(gòu)內(nèi)的精確時(shí)間同步。
時(shí)間同步技術(shù)
要實(shí)現(xiàn)時(shí)間同步,首先需要一位德高望重,威名遠(yuǎn)播的的族長(zhǎng)(時(shí)鐘源)。族長(zhǎng)負(fù)責(zé)宗族內(nèi)部的管理和各項(xiàng)事務(wù)的主持(進(jìn)行時(shí)間同步)。有的家族過(guò)于龐大,族長(zhǎng)年事又高,一般會(huì)再選一名柱首(主時(shí)鐘節(jié)點(diǎn))及幾名房長(zhǎng)(邊界時(shí)鐘節(jié)點(diǎn))替族長(zhǎng)處理族里日常雜事,族員的恩怨情仇(主時(shí)鐘設(shè)備對(duì)其它設(shè)備進(jìn)行授時(shí))。
時(shí)鐘源
自動(dòng)駕駛系統(tǒng)目前絕大多數(shù)標(biāo)配高精度GNSS接收機(jī),而GNSS中導(dǎo)航衛(wèi)星內(nèi)置高精度原子鐘,GNSS接收機(jī)通過(guò)解算導(dǎo)航衛(wèi)星信號(hào),可以獲得超高精度的時(shí)鐘信號(hào)。所以GNSS除了廣為人知的定位功能,還有一個(gè)鮮為人知但重要非凡的授時(shí)功能。
原子鐘是人類目前最精確的時(shí)間測(cè)量?jī)x器,原子在不同能級(jí)之間的移動(dòng)稱為“躍遷”,且由高能級(jí)躍遷到低能級(jí)時(shí),會(huì)釋放電磁波。而對(duì)同一種原子來(lái)說(shuō),這種頻率是固定的,且不受溫度和壓力影響,只與自身能量有關(guān),物理學(xué)上稱之為“共振頻率”。物理學(xué)家通過(guò)一些物理手段,獲得共振頻率的準(zhǔn)確物理值。并以此值作為產(chǎn)生時(shí)間信號(hào)的基本節(jié)拍,即丈量時(shí)間的基本單位。據(jù)相關(guān)報(bào)道,北斗三號(hào)衛(wèi)星上的原子鐘300年才會(huì)有1s累積誤差。
GNSS車載接收機(jī)在接收到大于等于4顆衛(wèi)星的地方,通過(guò)解算即可獲得接收機(jī)系統(tǒng)時(shí)間與衛(wèi)星原子鐘之間鐘差,并通過(guò)鐘差來(lái)校準(zhǔn)自己的系統(tǒng)時(shí)間,這一步就是GNSS的授時(shí)功能。至此,GNSS車載接收機(jī)已經(jīng)得到上天誥命,成為這個(gè)家族最德高望重的族長(zhǎng)了。
“兩條族規(guī)”-PPS+GPRMC
GNSS接收機(jī)加冕完成后,會(huì)頒布兩條族規(guī)。一條是時(shí)間周期為1s的同步脈沖信號(hào)PPS,脈沖寬度5ms~100ms;一條是通過(guò)標(biāo)準(zhǔn)串口輸出GPRMC標(biāo)準(zhǔn)的時(shí)間同步報(bào)文。同步脈沖前沿時(shí)刻與GPRMC報(bào)文的發(fā)送在同一時(shí)刻,誤差為ns級(jí)別,誤差可以忽略。GPRMC是一條包含UTC時(shí)間(精確到秒),經(jīng)緯度定位數(shù)據(jù)的標(biāo)準(zhǔn)格式報(bào)文。
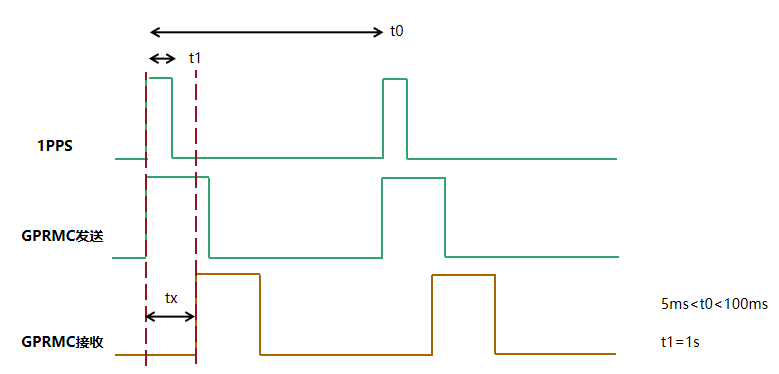
PPS秒脈沖為物理電平輸出,接收及處理PPS信號(hào)的時(shí)間在ns級(jí)別,依舊可以忽略。但GPRMC數(shù)據(jù)一般通過(guò)波特率9600的串口發(fā)送,發(fā)送、接收、處理時(shí)間tx在ms級(jí)別,是時(shí)間同步的關(guān)鍵。以下是使用PPS+GPRMC進(jìn)行時(shí)間同步的原理。
(1)設(shè)備收到PPS秒脈沖信號(hào)后,將內(nèi)部以晶振為時(shí)鐘源的系統(tǒng)時(shí)間里的毫秒及以下時(shí)間清零,并由此開(kāi)始計(jì)算毫秒時(shí)間。
(2)當(dāng)收到GPRMC數(shù)據(jù)后,提取報(bào)文里的時(shí)、分、秒、年、月、日UTC時(shí)間。
(3)將收到秒脈沖到解析出GPRMC中UTC時(shí)間所用的時(shí)間tx,與UTC整秒時(shí)間相加,同步給系統(tǒng)時(shí)間,至此已完成一次時(shí)間同步。下一秒再進(jìn)行相同的過(guò)程,每秒準(zhǔn)確校準(zhǔn)一次。
聰明的人可能已經(jīng)恍然大悟,后面哪個(gè)小弟需要進(jìn)行時(shí)間同步,誰(shuí)做兩根線接上這兩個(gè)物理接口就妥了。可見(jiàn)你是一位自以為是的主管,一位聽(tīng)不進(jìn)去良言的中層!
(1)PPS是一個(gè)低功率的脈沖電平信號(hào),驅(qū)動(dòng)電流少的只有0.5mA,多的也就20mA,帶幾個(gè)小弟還行,十幾個(gè)就很困難了
(2)PPS是無(wú)屏蔽的單線脈沖信號(hào),十幾根PPS線穿梭在車內(nèi),極易受到車內(nèi)惡劣電磁環(huán)境的干擾,屆時(shí)根本無(wú)法區(qū)分出是干擾脈沖還是同步脈沖。
(3)GPRMC通過(guò)RS232串口發(fā)送同步報(bào)文,RS232是一種1對(duì)1的全雙工通信形式,也可以通過(guò)主從形式實(shí)現(xiàn)1對(duì)幾數(shù)據(jù)傳輸。但對(duì)十幾,實(shí)屬罕見(jiàn),只能通過(guò)試驗(yàn)驗(yàn)證到底可不可行。但至少線束工程師是打死不愿答應(yīng)的。
(4)當(dāng)時(shí)鐘源丟失的時(shí)候,所有需要時(shí)間同步的設(shè)備都一下子沒(méi)有了主心骨,每個(gè)小弟都可以自立門戶,沒(méi)有二當(dāng)家的及時(shí)站出來(lái),主持大局。這對(duì)功能安全要求極高的自動(dòng)駕駛系統(tǒng)來(lái)說(shuō),根本無(wú)法接受。
高精度時(shí)間同步協(xié)議PTP
因此基于單純的PPS和GPRMC實(shí)現(xiàn)整個(gè)自動(dòng)駕駛系統(tǒng)的時(shí)間同步,具有理論可行性,但并不具有實(shí)際可操作性。而基于網(wǎng)絡(luò)的高精度時(shí)間同步協(xié)議PTP(Precision Time Protocol,1588 V2),同步精度可以達(dá)到亞微秒級(jí)。這對(duì)于主干網(wǎng)絡(luò)為以太網(wǎng)的全域架構(gòu)來(lái)說(shuō),簡(jiǎn)直是萬(wàn)事具備,只欠各域控制器的硬件PHY芯片支持了。
PTP是一種主從式的時(shí)間同步系統(tǒng),采用硬件時(shí)間戳,因此可以大幅減少軟件處理時(shí)間。同時(shí)PTP可運(yùn)行在L2層(MAC層)和L4層(UDP層),運(yùn)行在L2層網(wǎng)絡(luò)時(shí),直接在MAC層進(jìn)行報(bào)文解析,不用經(jīng)過(guò)四層UDP協(xié)議棧,從而大幅減少協(xié)議棧駐留時(shí)間,進(jìn)一步提高時(shí)間同步精度,對(duì)于自動(dòng)駕駛系統(tǒng)來(lái)說(shuō)非常友善。
設(shè)備中運(yùn)行PTP協(xié)議的網(wǎng)絡(luò)端口稱為PTP端口,PTP主端口用來(lái)發(fā)布時(shí)間,PTP從端口用來(lái)接收時(shí)間。同時(shí)定義了三種時(shí)鐘節(jié)點(diǎn),邊界時(shí)鐘節(jié)點(diǎn)(BC,Boundary Clock)、普通時(shí)鐘節(jié)點(diǎn)(OC,Ordinary Clock)和透明時(shí)鐘節(jié)點(diǎn)(TC,Transparent clock)。
(1)邊界時(shí)鐘節(jié)點(diǎn)擁有多個(gè)PTP端口,其中一個(gè)用來(lái)同步上游設(shè)備時(shí)間,其余端口用來(lái)向下游設(shè)備發(fā)送時(shí)間。當(dāng)邊界時(shí)鐘節(jié)點(diǎn)的上游時(shí)間同步設(shè)備是GNSS接收機(jī)時(shí),此時(shí)的邊界時(shí)鐘節(jié)點(diǎn)就是一個(gè)主時(shí)鐘節(jié)點(diǎn)(最優(yōu)時(shí)鐘)
(2)普通時(shí)鐘節(jié)點(diǎn)只有一個(gè)PTP端口,用來(lái)同步上游時(shí)鐘節(jié)點(diǎn)的時(shí)間。
(3)透明時(shí)鐘,人如其名,具有多個(gè)PTP端口,收到什么時(shí)間,轉(zhuǎn)發(fā)什么時(shí)間,不進(jìn)行協(xié)議解析,內(nèi)部不參與時(shí)間同步。
PTP通過(guò)在主從設(shè)備之間交互同步報(bào)文,并記錄下報(bào)文發(fā)送時(shí)間,從而計(jì)算網(wǎng)絡(luò)傳輸延遲和主從設(shè)備間時(shí)鐘的偏差。PTP定義了四條同步報(bào)文:Sync、Follow_Up、Delay_Req、Delay_Resp,精確同步過(guò)程如下。
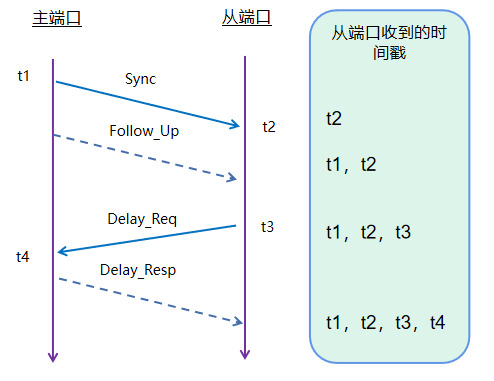
(1)PTP主端口向從端口發(fā)送Sync報(bào)文,同步記錄下Sync發(fā)送的時(shí)間t1。從端口收到Sync報(bào)文后,記錄下收到的時(shí)間t2。
(2)緊接著主端口將t1時(shí)間放到Follow_Up報(bào)文發(fā)送給從端口,從端口收到此報(bào)文后就可以解析出t1,并由此得到第一個(gè)方程式:t1+網(wǎng)絡(luò)延時(shí)+時(shí)鐘偏差=t2。
(3)從端口向主端口發(fā)送Delay_Req報(bào)文,同步記錄下Delay_Req發(fā)送的時(shí)間t3。主端口收到報(bào)文后,記錄下收到的時(shí)間t4。
(4)緊接著主端口將t4時(shí)間放到Delay_Resp報(bào)文發(fā)送給從端口,從端口收到此報(bào)文后就可以解析出t4,并由此得到第一個(gè)方程式:t3+網(wǎng)絡(luò)延時(shí)-時(shí)鐘偏差=t4。
兩個(gè)未知數(shù),兩個(gè)方程組,應(yīng)用初中數(shù)學(xué)知識(shí)可以解出:網(wǎng)絡(luò)延時(shí)=[(t2-t1)+(t4-t1)]/2,時(shí)鐘偏差=[(t2-t1)-(t4-t3)]/2。
全域架構(gòu)時(shí)間同步方案
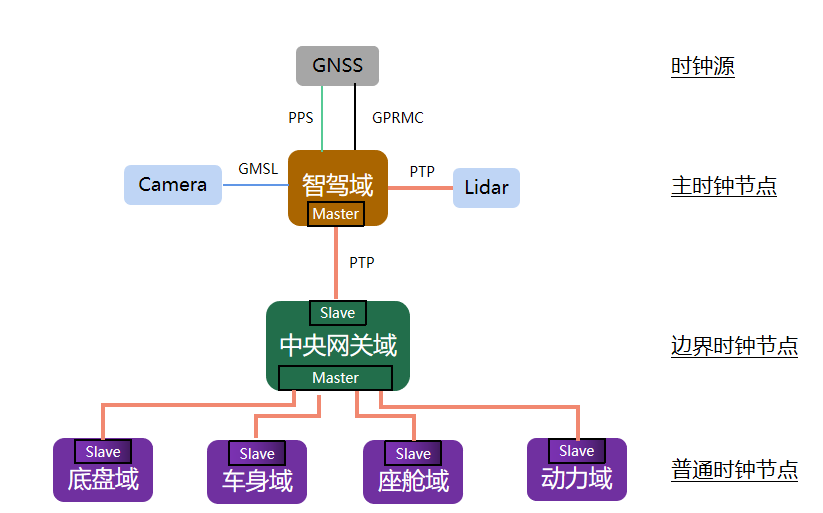
全域架構(gòu)下,智駕域控制器因?yàn)橹苯舆B接GNSS接收機(jī)(或內(nèi)置),而GNSS又是絕佳的時(shí)鐘源,因此智駕域控制器自然而然成為主時(shí)鐘節(jié)點(diǎn),中央網(wǎng)關(guān)域控制器通過(guò)車載以太網(wǎng)主干網(wǎng)串聯(lián)起其它域控制器,自然而然成為邊界時(shí)鐘的最佳選擇,這樣在時(shí)鐘源丟失的時(shí)候,邊界時(shí)鐘節(jié)點(diǎn)同步主時(shí)鐘節(jié)點(diǎn)的系統(tǒng)時(shí)間,仍然可以保持整個(gè)全域架構(gòu)內(nèi)相對(duì)時(shí)間一致。
其它域內(nèi)傳感器、執(zhí)行器的時(shí)間同步需求,若沒(méi)有,此域控制器設(shè)計(jì)成普通時(shí)鐘節(jié)點(diǎn)即可。如有,可以設(shè)計(jì)成邊界時(shí)鐘,以保證無(wú)時(shí)鐘源時(shí)的相對(duì)時(shí)間統(tǒng)一。
基于以太網(wǎng)設(shè)備的時(shí)間同步方案已經(jīng)完善,而對(duì)于非車載以太網(wǎng)設(shè)備但有非常強(qiáng)烈同步需求的相機(jī),我們還得特殊處理一下。將相機(jī)設(shè)置為外觸發(fā)模式,通過(guò)主控給相機(jī)外觸發(fā)脈沖信號(hào)。相機(jī)拍照時(shí),曝光時(shí)刻也會(huì)產(chǎn)生脈沖信號(hào)發(fā)送給主控,主控記錄此時(shí)系統(tǒng)時(shí)間,并將時(shí)間戳數(shù)據(jù)放到相機(jī)的圖像數(shù)據(jù)里。
寫(xiě)在最后
中秋放假回家期間,叫了一輛出租車去市區(qū)拉動(dòng)餐飲業(yè)GDP,途中經(jīng)過(guò)一個(gè)十字路口,出租車師傅說(shuō):“昨晚打雷,紅綠燈給打壞了,交警還沒(méi)過(guò)來(lái)指揮,怎么通行就看個(gè)人素質(zhì)了”。我直起腰通過(guò)前擋風(fēng)玻璃往前一看,我們位于左轉(zhuǎn)車道的第三位。心想,下一輪左轉(zhuǎn)我們指定能通過(guò)。但眼見(jiàn)花開(kāi)花落,日出日落三個(gè)春夏秋冬過(guò)去了,我們未動(dòng)分毫。
師傅開(kāi)始罵罵咧咧:“你XX倒是見(jiàn)縫插針呀,剛才那么大機(jī)會(huì)你不沖過(guò)去”。緊接著就是帶著慍怒的鳴笛聲此起彼伏。第一輛車司機(jī)似乎意識(shí)到自己的無(wú)所作為引起的民憤,終于在第四個(gè)春季,瞅準(zhǔn)了機(jī)會(huì),往前挪動(dòng)了1米,隨后又被直行的車輛搶占先機(jī)。
此刻,怒其不爭(zhēng),哀其不幸已無(wú)濟(jì)于事。就是這1米,給了第二輛車左轉(zhuǎn)超車的機(jī)會(huì),在直行車流稍微稀疏了一點(diǎn)之后,一個(gè)完美的左轉(zhuǎn)超車,順利完成扭轉(zhuǎn)。而我們的出租車師傅,憑著半頭白發(fā)的經(jīng)驗(yàn),緊跟第二輛車也實(shí)現(xiàn)了完美轉(zhuǎn)身。并在駛過(guò)第一輛車時(shí),喊出了那份郁結(jié)于胸的苦悶:“無(wú)人駕駛快點(diǎn)來(lái)吧,少讓這些人受罪吧”
聽(tīng)到這句話,我差點(diǎn)笑噴。一位半頭白發(fā)、年過(guò)五十的老出租車師傅,也已在心中萌芽出自動(dòng)駕駛的概念。讓我想到古代帝王登基前的輿論造勢(shì),當(dāng)天下人都知道是天命不可違后,良時(shí)登基便是順天應(yīng)時(shí)。而自動(dòng)駕駛即將在各行各業(yè)所帶來(lái)的深刻變革,不亞于之前任何一位技術(shù)帝王登基前的神光籠罩、龍?bào)搭^頂。
紅綠燈被雷打壞是俗世極小概率發(fā)生,但客觀存在的事件。人憑借自己的經(jīng)驗(yàn)尚不能很好的應(yīng)對(duì),更別提極度依靠交通環(huán)境信息交互的自動(dòng)駕駛系統(tǒng)。如何面對(duì)這樣的Corner Case,可能把自動(dòng)駕駛公司分成了不同的樣子。有一動(dòng)不動(dòng)的新手司機(jī),有見(jiàn)縫插針的白發(fā)師傅,更有閃轉(zhuǎn)騰挪的藤原拓海。自動(dòng)駕駛已至,變革已至,未來(lái)已至。
審核編輯 :李倩
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14248瀏覽量
170001
原文標(biāo)題:時(shí)間同步,自動(dòng)駕駛里的花好月圓
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
自動(dòng)駕駛安全基石:ODD
新能源車軟件單元測(cè)試深度解析:自動(dòng)駕駛系統(tǒng)視角

劉強(qiáng)東,進(jìn)軍汽車領(lǐng)域# 京東# 自動(dòng)駕駛# 自動(dòng)駕駛出租車# 京東自動(dòng)駕駛快遞車
NVIDIA Halos自動(dòng)駕駛汽車安全系統(tǒng)發(fā)布
光庭信息自動(dòng)駕駛系統(tǒng)亮相CES 2025

L3自動(dòng)駕駛法規(guī)同步登陸北京、武漢 #自動(dòng)駕駛 #智能駕駛 #交通法規(guī)
AUTOSAR通信對(duì)自動(dòng)駕駛的影響 AUTOSAR通信與嵌入式系統(tǒng)設(shè)計(jì)
一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

自動(dòng)駕駛汽車安全嗎?


自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL
自動(dòng)駕駛技術(shù)的典型應(yīng)用 自動(dòng)駕駛技術(shù)涉及到哪些技術(shù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論