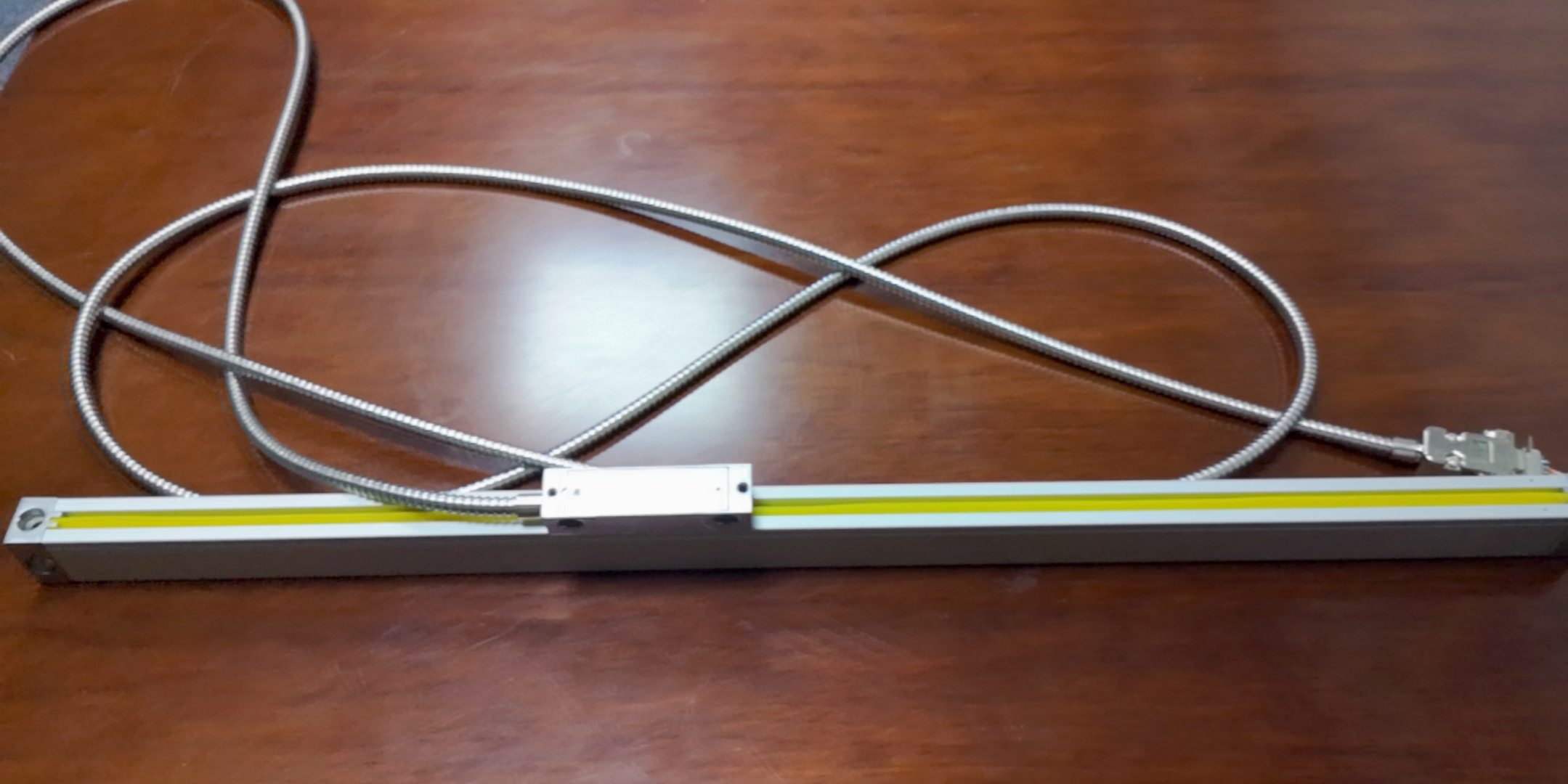
") 光柵尺編碼器數(shù)據(jù)采集卡脈沖信號(hào)
光柵尺編碼器數(shù)據(jù)采集卡脈沖信號(hào)

光柵尺是如何實(shí)現(xiàn)高精度全閉環(huán)控制
1:光柵的功能與信號(hào)轉(zhuǎn)化,測(cè)量物體的位移距離,光信號(hào)轉(zhuǎn)化為電信號(hào),電信號(hào)轉(zhuǎn)化為脈沖信號(hào),反饋給控制器
2:伺服系統(tǒng)與光柵尺組成的全閉環(huán)控制
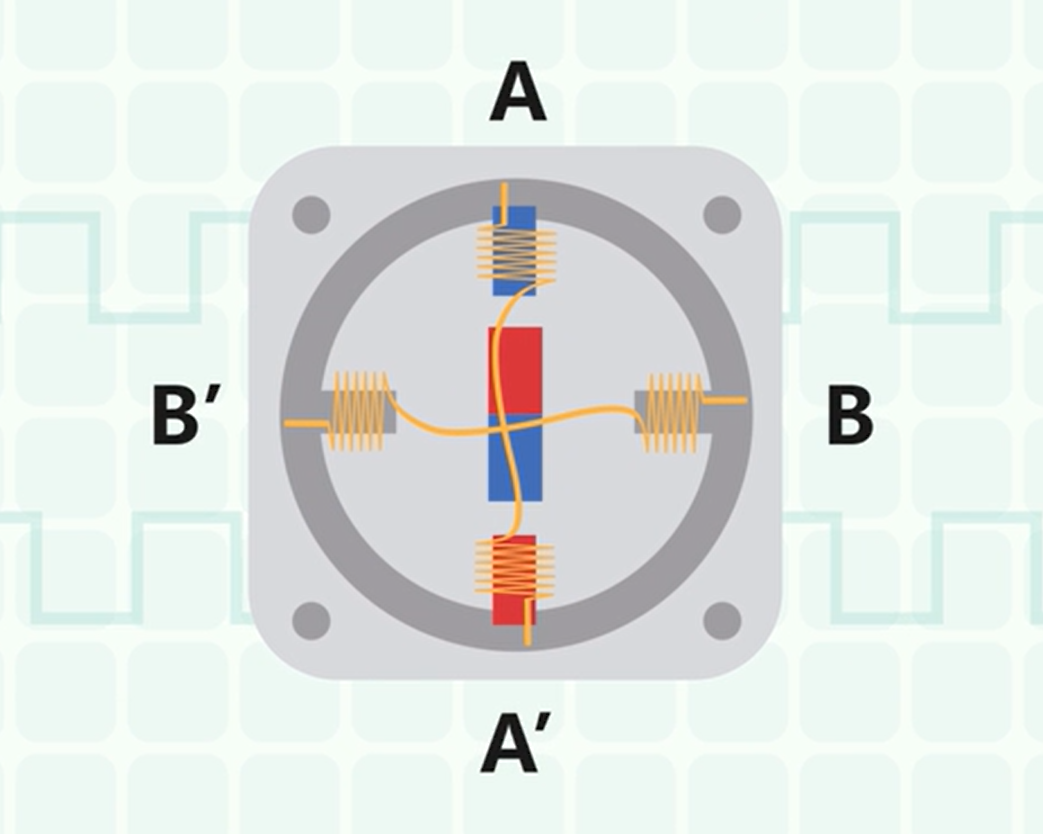
3:旋轉(zhuǎn)編碼器存在的意義
簡單的來講,一個(gè)絲桿的模組,一般是通過尾部的伺服電機(jī)上的旋轉(zhuǎn)編碼器來進(jìn)行測(cè)量旋轉(zhuǎn)的圈數(shù)來判斷這個(gè)滑臺(tái)位移的一個(gè)位置,還有就是使用開環(huán)的步進(jìn)電機(jī)來進(jìn)行一個(gè)準(zhǔn)確的控制位移。現(xiàn)在這個(gè)使用的是尾部的一個(gè)旋轉(zhuǎn)編碼器來測(cè)量絲桿的滑行距離,但這個(gè)只能是稱得上半閉環(huán),為什么呢。因?yàn)檫@里就涉及到一個(gè)問題如果我們的連軸器沒有鎖緊它如果打滑了呢,如果是絲桿之間有很大的間隙呢,會(huì)不會(huì)產(chǎn)生一定的誤差,所以反過來說電機(jī)上的編碼器只是反饋的電機(jī)的旋轉(zhuǎn)位置,沒有真正意義上獲取到我們進(jìn)行移動(dòng)的滑臺(tái)的位置,所以叫半閉環(huán)控制。這個(gè)時(shí)候我們加上一個(gè)光柵尺,就能獲得實(shí)際滑臺(tái)實(shí)際的一個(gè)位置,然后這個(gè)光柵尺得到的位移信息就會(huì)傳到PLC或運(yùn)動(dòng)控制器上位控制器上進(jìn)行一個(gè)反饋,然后PLC就知道滑臺(tái)是不是和發(fā)布的指令一樣進(jìn)行了相應(yīng)的一個(gè)位移,如果沒有按計(jì)劃進(jìn)行的位移,它會(huì)發(fā)出相應(yīng)的指令給伺服驅(qū)動(dòng)器,伺服驅(qū)動(dòng)器做出指令給電機(jī),電機(jī)執(zhí)行。這樣的一套過程下來,就會(huì)精準(zhǔn)的控制滑臺(tái)進(jìn)行精密工作,這就形成了全閉環(huán)控制。
-
編碼器
+關(guān)注
關(guān)注
45文章
3786瀏覽量
137574 -
數(shù)據(jù)采集
+關(guān)注
關(guān)注
40文章
7076瀏覽量
116079 -
脈沖信號(hào)
+關(guān)注
關(guān)注
6文章
402瀏覽量
37579 -
伺服驅(qū)動(dòng)器
+關(guān)注
關(guān)注
22文章
519瀏覽量
32480 -
光柵尺
+關(guān)注
關(guān)注
1文章
66瀏覽量
13056
發(fā)布評(píng)論請(qǐng)先 登錄
數(shù)據(jù)采集卡與步進(jìn)電機(jī)
直線電機(jī)模組中光柵尺和磁柵尺的區(qū)別
數(shù)據(jù)采集卡與壓力傳感器

數(shù)據(jù)采集卡:示波器不是萬能的!!!#數(shù)據(jù)采集卡 #示波器 #熱電偶 #信號(hào)
信號(hào)采集卡有什么用,信號(hào)采集卡支持信號(hào)格式有哪些
什么是信號(hào)的時(shí)域和頻域?#時(shí)域 #頻域 #電工知識(shí) #數(shù)據(jù)采集卡
光柵尺和編碼器的區(qū)別 光柵尺和編碼器哪個(gè)精度高

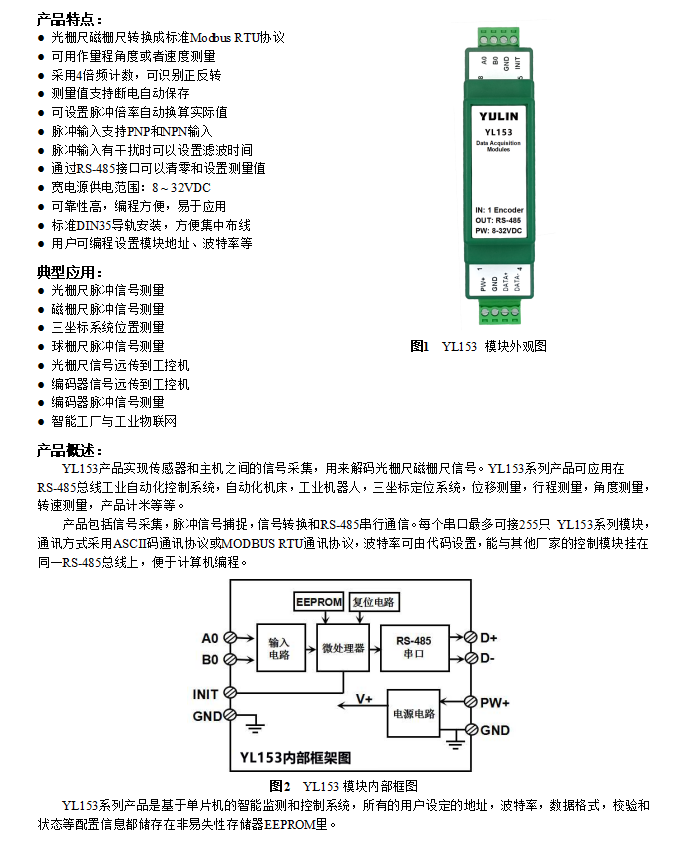
光柵尺磁柵尺脈沖信號(hào)編碼器4倍頻脈沖計(jì)數(shù)器轉(zhuǎn)485采集模塊 YL153
步進(jìn)控制的光柵尺全閉環(huán)解決方案:32軸EtherCAT總線運(yùn)動(dòng)控制器ZMC432CL-V2

TSW1418EVM高速數(shù)據(jù)采集卡


數(shù)據(jù)采集卡VS傳統(tǒng)儀表#數(shù)據(jù)采集卡 #儀器儀表 #電子技術(shù)
圖像采集卡:增強(qiáng)視覺數(shù)據(jù)采集

EPSON差分振蕩器賦能數(shù)據(jù)采集卡,讓數(shù)據(jù)更精準(zhǔn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論