") 功能安全的算法選擇標準
功能安全的算法選擇標準

深度學習已經(jīng)徹底改變了機器學習系統(tǒng)及其功能,但它不一定是最適合所有任務的方法。對于其他類型的應用程序,使用傳統(tǒng)的模式識別方法(如邏輯回歸、樸素貝葉斯或 k 均值聚類)可能更合適。因此,選擇正確的機器學習算法的標準是必要的。這些標準描述如下。
問題的復雜性是支配選擇的直接標準,它必須適合方法的復雜性。該標準可以轉(zhuǎn)換為算法必須學習的參數(shù)數(shù)量。例如,邏輯回歸算法學習圖 8 中映射函數(shù)的兩個參數(shù)。可能需要深度神經(jīng)網(wǎng)絡來學習數(shù)百萬個參數(shù),才能獲得與邏輯回歸方法相似的結果。圖 12 第 11 頁顯示了根據(jù)其復雜性排序的機器學習算法的近似分布。h_θ (x)
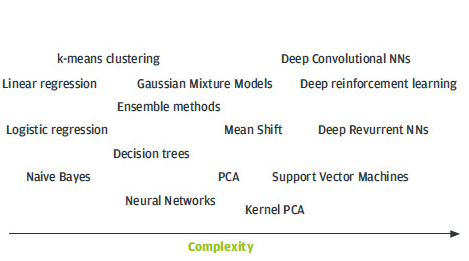
圖12:基于復雜性的機器學習算法分類。
每種算法背后的數(shù)學是這一經(jīng)驗發(fā)現(xiàn)的基礎。偏差-方差權衡是選擇和構建機器學習系統(tǒng)的一個重要方面。偏差是由學習方法做出的錯誤假設產(chǎn)生的錯誤。它與擬合不足的問題直接相關。高偏置算法無法找到輸入特征和目標標簽之間的相關關系。相反,方差是衡量方法對輸入數(shù)據(jù)中存在的隨機噪聲的敏感性的度量。高方差系統(tǒng)可能會導致過度擬合,其中算法對隨機噪聲而不是實際輸入特征進行建模。在實踐中,必須在偏差和方差之間進行權衡,因為這兩個量彼此成正比。另一個應該考慮的標準是數(shù)據(jù)工程師在訓練分類器時需要調(diào)整的調(diào)優(yōu)參數(shù)的數(shù)量。
最后,還需要考慮輸入數(shù)據(jù)的性質(zhì)。特征空間中數(shù)據(jù)的線性分離在現(xiàn)實世界中是不尋常的。可以說,對于某些應用,可以假設線性。這方面的一個例子是根據(jù)第3節(jié)開頭描述的大小和速度對汽車和非汽車物體進行分類。這個假設對于選擇合適的機器學習方法至關重要,因為與非線性分類器相比,線性分類器對于可以線性分離的數(shù)據(jù)更快、更有效。
功能安全注意事項
功能安全是系統(tǒng)整體安全的一部分。ISO 26262“道路車輛 - 功能安全”描述了道路車輛電氣和電子 (E/E) 系統(tǒng)的發(fā)展。通過各種活動或技術解決方案使系統(tǒng)變得安全。這些所謂的安全措施反映在指定需求、創(chuàng)建架構和設計以及執(zhí)行驗證和確認的過程活動中。
避免系統(tǒng)故障是ISO 26262的一個方面。人為故障是傳統(tǒng)工程系統(tǒng)中的系統(tǒng)性故障。此類失敗的一些明顯示例包括:不完整的需求和測試用例,被遺忘的設計重要方面或未能發(fā)現(xiàn)問題的驗證。使用機器學習時也是如此。此外,要學習的任務和相應的測試用例也都由人類描述。此處仍可能發(fā)生系統(tǒng)故障。因此,機器學習模型的開發(fā)需要應用最佳實踐或適當?shù)臉藴柿鞒獭H此還不夠。為了控制機器學習算法中的系統(tǒng)故障,需要采取安全措施,因為系統(tǒng)元素的部分開發(fā)將在未來通過此類算法完成。只有當兩者都能得到保證時,才能消除這些故障。
最近,由于機器學習在自動駕駛系統(tǒng)中的使用越來越多,機器學習背景下的安全性得到了更多的關注。Amodei等人,2016年,討論了與事故風險相關的研究問題以及解決這些問題的可能方法。傳統(tǒng)軟件系統(tǒng)中的代碼必須滿足特定的要求,這些要求隨后通過標準化測試進行檢查。在機器學習中,計算機可以被認為是通過學習方法接管“編程”模塊的任務。這種“編程”表示在考慮第 3 節(jié)中介紹的技術背景時學習算法的參數(shù)或權重。學習過程通常是隨機的,這意味著無法定義硬性要求。因此,機器學習組件是一個黑匣子系統(tǒng)。因此,由于其高維度和大量參數(shù),很難甚至不可能解釋學習的內(nèi)容。
環(huán)境傳感器和相關處理起著超出功能安全要求的決定性作用,尤其是在高度自動化駕駛的情況下。預期功能的安全性(SOTIF)涉及用于確保預期功能的安全關鍵方面正確執(zhí)行的方法和措施,同時考慮傳感器和處理算法。然而,對于傳統(tǒng)的工程系統(tǒng)和機器學習系統(tǒng),這個問題必須得到澄清,它仍然是正在進行的討論的主題。
虛擬模擬器中的分析是披露此類算法的一種方法。我們將這種方法用于第2.2節(jié)中介紹的自學習系統(tǒng)的實驗。在將機器學習系統(tǒng)部署到現(xiàn)實世界的汽車中之前,理論上可以在這樣的模擬環(huán)境中學習和評估無限數(shù)量的駕駛情況。
現(xiàn)在,機器學習已經(jīng)從游戲和模擬發(fā)展到現(xiàn)實世界的汽車應用,生命岌岌可危。如前所述,功能安全問題因此變得越來越重要,這也影響了科學界。一個結果是研究在模擬中對不同的機器學習和人工智能算法進行基準測試的方法。OpenAI Gym(Brockman et al. 2016)就是這樣一個模擬器,它是開發(fā)和比較強化學習算法的工具包。
結論與展望
基于機器學習的功能在高度自動駕駛中的應用受到最近成就的推動。最初的原型確實產(chǎn)生了有希望的結果,并表明了在解決相關復雜問題時的優(yōu)勢。然而,即使機器學習是合適的,仍然存在大量挑戰(zhàn)。首先有必要為給定的任務選擇正確的神經(jīng)網(wǎng)絡類型。這種選擇與應用學習方法、必要的預處理和訓練數(shù)據(jù)的數(shù)量有關。關于將整體驅(qū)動任務分解為更小的子任務的最佳方法,仍然存在討論。深度學習技術能夠在不需要分解的情況下實現(xiàn)端到端方法,但目前認為這在驗證和確認功能方面不太合適。機器學習社區(qū)需要開發(fā)增強的方法,尤其是為了滿足功能安全要求,這是相關功能成功工業(yè)化的基礎。
Elektrobit相信,盡管仍然存在挑戰(zhàn),但機器學習有可能重塑未來的汽車軟件和系統(tǒng)格局。為此,已開始兩個方面的調(diào)查。首先是應用基于機器學習的方法作為高度自動化駕駛場景(選定的子集)的解決方案,例如上面提到的用例。EB robinos 參考架構以及與 NVIDIA 的合作等都有助于開發(fā)環(huán)境。其次,Elektrobit 利用其在汽車軟件功能安全和工業(yè)化領域的專業(yè)知識,將這些想法及其合作伙伴和客戶的產(chǎn)品變?yōu)楝F(xiàn)實。
審核編輯:郭婷
-
機器學習
+關注
關注
66文章
8499瀏覽量
134314 -
深度學習
+關注
關注
73文章
5557瀏覽量
122645
發(fā)布評論請先 登錄
中偉視界:罐籠超員監(jiān)測AI算法,智慧礦山運輸?shù)?b class='flag-5'>安全新標準
安森美再談圖像傳感器的選擇標準
安森美分析圖像傳感器的選擇標準
嵌入式軟件開發(fā)符合ISO 26262 功能安全標準
如何使用高性能監(jiān)控電路來提高工業(yè)功能安全合規(guī)性
NVIDIA DRIVE Hyperion平臺通過汽車功能安全和網(wǎng)絡安全認證
功能安全:從應用到標準的全面解析

加密算法的選擇對于加密安全有多重要?
易控智駕正式通過汽車功能安全流程認證

如何正確選擇醫(yī)療測試設備?

滿足多場景多標準的通用多功能電氣安全測試設備Profitest Prime AC

什么是汽車ISO 26262功能安全標準?
功能安全標準在汽車芯片領域的應用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論