") 一文讀懂經(jīng)典雙目稠密匹配算法SGM
一文讀懂經(jīng)典雙目稠密匹配算法SGM
題圖為SGM算法的一個(gè)處理結(jié)果。
最近來(lái)看看一些雙目稠密匹配的算法。說(shuō)來(lái)慚愧,SGM在航測(cè)領(lǐng)域是很重要的算法(當(dāng)然也是最好的雙目稠密匹配算法之一),自己卻沒(méi)有認(rèn)真讀過(guò),只是大致有些了解。
看了論文,再結(jié)合網(wǎng)上一些資料,自己做了些論文筆記。
想到關(guān)于SGM論文網(wǎng)上還沒(méi)看到比較翔實(shí)的博客,就把自己做的筆記再加些解釋分享出來(lái)了(下文中的引用部分多為我自己的思考)。
其中還有一些是自己不理解的地方,準(zhǔn)備后續(xù)寫(xiě)代碼時(shí)研究。
也希望大家可以分享自己的見(jiàn)解,或?qū)ξ恼聝?nèi)容進(jìn)行批評(píng)指正。
由于是論文筆記,所以有些中英夾雜,而且有些想想也不好翻譯,就不再改了。閑話(huà)少說(shuō),直接來(lái)看論文吧。
基礎(chǔ)
雙目圖像稠密匹配的4個(gè)基本步驟為:
Matching cost computation;
Cost aggregation: connects the matching cost within a certain neighborhood;
Disparity computation: selects the disparity with the lowest matching cost;
Disparity refinement: removing peaks,
interpolating gaps or increasing the accuracy by sub-pixel interpolation.
這4個(gè)都比較好理解,SGM論文也是按照這樣來(lái)組織的。
下面就按照論文的順序來(lái)詳細(xì)了解下SGM算法。
中心思想及要求
idea: 使用MI (Mutual Information) 來(lái)進(jìn)行單像素匹配 + 多個(gè)一維平滑約束(來(lái)擬二維約束)來(lái)進(jìn)行“全局”優(yōu)化。
前提: 已知立體像對(duì)間的對(duì)極幾何關(guān)系。

Pixelwise cost calculation
SGM算法不用圖像塊進(jìn)行匹配,只考慮當(dāng)前像素。因?yàn)槔脠D像塊進(jìn)行匹配對(duì)應(yīng)的隱性約束為塊內(nèi)像素的視差是相同的,而這在深度變化(物體邊界)的地方是不成立的。
互信息(MI):defined from the entropy(熵)of two images:
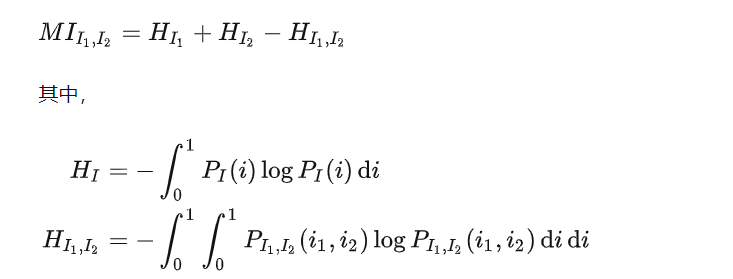
上式針對(duì)整張圖像而非單個(gè)像素,不能用作 cost。因此,對(duì)于一張圖像的聯(lián)合熵,有其他論文利用泰勒展開(kāi)計(jì)算:

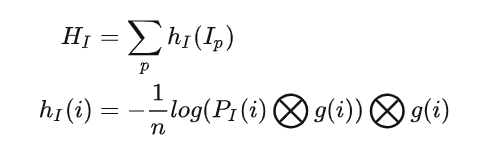
其中,公式內(nèi)第一項(xiàng)為像素 p 的灰度值,第二項(xiàng)為匹配像素的灰度值。
這里,聯(lián)合熵被簡(jiǎn)化為左圖所有像素點(diǎn)(及其對(duì)應(yīng)點(diǎn))的 h(i1,i2) 之和。



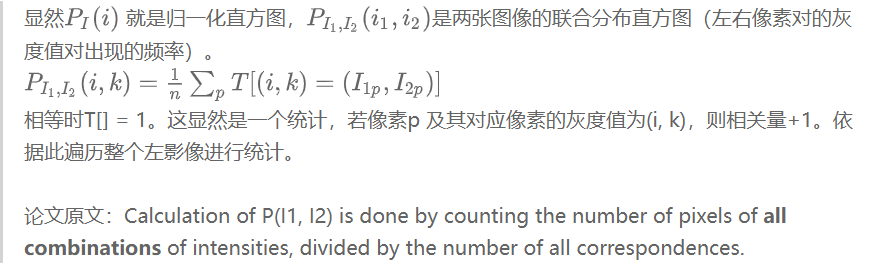
可以看到,由于極線(xiàn)矯正后左右圖十分相似,所以得到的聯(lián)合分布直方圖類(lèi)似于一個(gè)對(duì)角矩陣。
以上計(jì)算并不包含被遮擋的像素(如何得知哪些像素是被遮擋的?)。因此,為了避免包含遮擋像素,建議將熵也這么計(jì)算:
此外,以上計(jì)算也只針對(duì)兩張圖像的重疊部分。
因此,一維直方圖也可以這么計(jì)算:
h(i) 即為 P(I1, I2) 第 i 行(列)像素之和。
最終,互信息的定義為
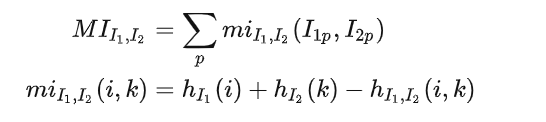
對(duì)于像素點(diǎn) p,若取其視差為 d,則對(duì)應(yīng)的 cost 為:

問(wèn)題:想要對(duì)匹配圖像 Im 進(jìn)行視差矯正就需要視差圖。
但我們的目標(biāo)就是獲取視差圖。
解決:
迭代法:start with a random disparity map for calculating Cmi. And use the cost for matching and calculating a new disparity map.
論文表示大致迭代3次就可以了。
層次法:recursively use the up-scaled disparity map (half resolution). Start with a random disparity map of 1/16 resolution. 在這個(gè)1/16的視差圖上重復(fù)計(jì)算3次(每次迭代3次,然后每放大一倍迭代3次計(jì)算出新的視差圖。
Aggregation of costs
以上就是論文進(jìn)行匹配的第一步。接下來(lái)就要進(jìn)行一個(gè)“全局”上的優(yōu)化。
pixelwise matching 還是不夠穩(wěn)定,因此需要加上一些約束來(lái)保持同一平面的像素具有相同的視差并懲罰鄰域內(nèi)視差不連續(xù)的像素(即平滑)。
所以最小化如下能量方程:

上式第一項(xiàng)為所有 MI cost 的和;
第二項(xiàng)對(duì) 像素p的鄰域內(nèi)出現(xiàn)視差與p的視差相差1 的像素 加上一個(gè)懲罰項(xiàng)P1;
第二項(xiàng)對(duì) 視差相差大于1 的像素加入更大的懲罰P2.

作用:對(duì)于小的視差相差使用較小的懲罰以適應(yīng)斜面或曲面;
對(duì)大的視差相差使用大的懲罰來(lái)防止深度(視差)不連續(xù)。
問(wèn)題在于全局最小化 E(D) 是一個(gè) NP 完全問(wèn)題,很難解算。
單行(1D)約束可以利用動(dòng)態(tài)規(guī)劃達(dá)到多項(xiàng)式時(shí)間。
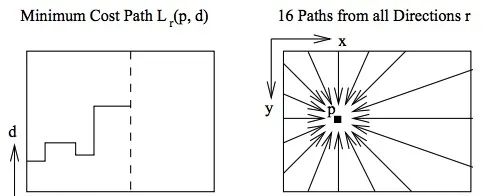
因此很自然地想到優(yōu)化多個(gè)單行的約束條件來(lái)擬合2D優(yōu)化,作者建議至少要選擇待優(yōu)化像素的8個(gè)方向。
The aggregated smoothed cost S(p, d) for a pixel p and disparity d is calculated by summing the costs of all 1D minimum cost paths that end in pixel p at disparity d.(也就是說(shuō)S是所有L之和。)


考慮到上述代價(jià)最后可能非常大,可將之修改為:

注意到被減項(xiàng)對(duì)于該方向上,像素 p 的任意視差都是一個(gè)常數(shù)(上一個(gè)像素的視差及其對(duì)應(yīng)的最小cost已經(jīng)計(jì)算好)。
最終,對(duì)于像素 p,選擇視差 d 的cost 就是:
S(p,d)=∑rLr(p,d)

選擇使 S(p, d) 最小的視差d. 若要到亞像素精度,可以利用 neighboring costs 來(lái)擬合一個(gè)二次曲線(xiàn)。

Multi-baseline matching
對(duì)左圖計(jì)算完視差圖后,還可以以同樣的方法來(lái)對(duì)右圖進(jìn)行視差圖的計(jì)算,在將二者融合起來(lái)。也可以利用多個(gè)立體像對(duì)來(lái)計(jì)算多張稠密視差圖。
問(wèn)題:areas which are not seen by all images will become invalid.
解決:取多視差圖的并集而非交集。
對(duì)于左圖來(lái)說(shuō),它的視差圖是恒定值(參考依據(jù)視差計(jì)算深度的公式),因此可以通過(guò)多圖匹配來(lái)優(yōu)化。
對(duì)左圖計(jì)算一個(gè)視差圖后,也可對(duì)右圖計(jì)算一個(gè)視差圖。然后進(jìn)行一致性校驗(yàn):

如此,確保 one to one mapping (uniqueness constrain).
Disparity Refinement
之后,是對(duì)所得的視差圖進(jìn)行優(yōu)化處理。個(gè)人覺(jué)得這是雙目稠密匹配很重要的一步,因?yàn)閷?duì)于很多算法,其得到的視差圖之間的差別并不會(huì)特別大。
重要的是對(duì)所得的視差圖進(jìn)行后處理,提高深度計(jì)算的精度。
移除極值
采用聯(lián)通域分割法,將視差相差在1個(gè)像素以?xún)?nèi)的像素4鄰域歸為一個(gè)聯(lián)通域來(lái)分割所得的視差圖。
根據(jù)場(chǎng)景事先確定一個(gè)大小閾值,去除像素?cái)?shù)量過(guò)少的聯(lián)通域。
Intensity Consistent Disparity Check
這步是SGM后處理比較核心的一步。
室內(nèi)場(chǎng)景的前后景之間會(huì)有視差不連續(xù)。
但前述的能量方程對(duì)于發(fā)生視差不連續(xù)的位置沒(méi)有偏好,這種不連續(xù)可能在錯(cuò)誤的地方出現(xiàn),因此會(huì)造成錯(cuò)誤的前后景物體邊界,或者一個(gè)斜面。
先前的將像素梯度與懲罰值P2關(guān)聯(lián)可以部分解決該問(wèn)題。
但在一些視差不連續(xù)的不對(duì)稱(chēng)的情況(如前景物體沒(méi)有完全出現(xiàn),只在出現(xiàn)的一邊產(chǎn)生視差不連續(xù))下可能失敗(原因待解)。
室內(nèi)環(huán)境中,后景常常為無(wú)紋理區(qū)域,如墻等。為解決這個(gè)問(wèn)題,先提出以下三個(gè)假設(shè):
無(wú)紋理區(qū)域內(nèi)部沒(méi)有視差不連續(xù)現(xiàn)象(即視差變化伴會(huì)隨梯度變化);
無(wú)紋理區(qū)域包含一些弱紋理(否則也無(wú)法進(jìn)行像素匹配);
無(wú)紋理區(qū)域的表面可以用一個(gè)平面表示(參考1,如此則區(qū)域內(nèi)視差恒定。否則為兩個(gè)可以分割開(kāi)的區(qū)域)。
解決步驟:先對(duì)圖像進(jìn)行分割,得到前后景區(qū)域。問(wèn)題就變?yōu)槿绾握_選擇后景(無(wú)紋理區(qū)域)的邊界和視差,較好的分割出前景物體。
利用 fixed bandwidth Mean Shift Segmentation 方法分割原始圖像,得到各個(gè)無(wú)紋理區(qū)域(假設(shè)1),忽略過(guò)小區(qū)域,所得區(qū)域表示為 Si。
利用聯(lián)通域分割法分割步驟1得到的無(wú)紋理區(qū)域(假設(shè)2),忽略過(guò)小區(qū)域,所得分割區(qū)域表示為 Sik;
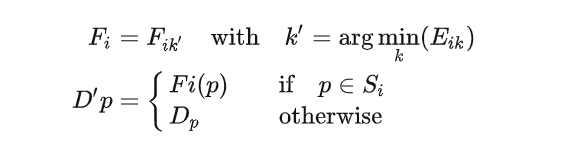
針對(duì)2得到的區(qū)域擬合平面 Fik (假設(shè)3)。將得到的各個(gè)可能平面推廣到所在的整個(gè)無(wú)紋理區(qū)域,取能量方程最小的平面。
遮擋判斷子步驟:對(duì)于像素p,若其匹配像素q有了另一個(gè)匹配,且新的匹配像素的視差大于像素p,則像素p認(rèn)為被遮擋;
該無(wú)紋理區(qū)域內(nèi)的視差都替換為最佳擬合平面所對(duì)應(yīng)的視差;
Discontinuity Preserving Interpolating
后處理完的視差圖可能因?yàn)檎趽趸蛘`匹配而存在缺失區(qū)域。對(duì)這些區(qū)域的視差進(jìn)行插值前要對(duì)其性質(zhì)進(jìn)行分類(lèi),以使用不同的插值方法:
遮擋:用背景的視差進(jìn)行外插值,而不使用前面的遮擋物的視差;
誤匹配:可以利用其周?chē)袼剡M(jìn)行內(nèi)插值。
注意:對(duì)與遮擋相連的誤匹配區(qū)域,同樣利用背景像素進(jìn)行外插值。
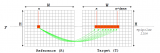
區(qū)分:由于遮擋會(huì)照成視差不連續(xù)。被遮擋位置的像素的極線(xiàn)不與disparity function(即視差隨位置變化的方程)相交;誤匹配像素則相反。
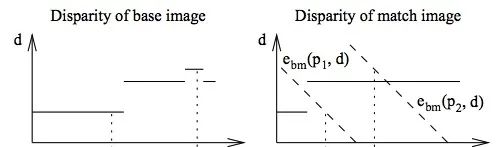
如上圖,點(diǎn)p1處就是因?yàn)檎趽醵斐牲c(diǎn)缺失;而點(diǎn)p2則是因?yàn)檎`匹配。
插值仍然是從像素周?chē)?個(gè)方向計(jì)算出8個(gè)可能的視差值,然后
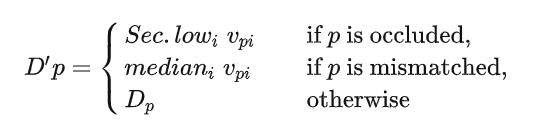
該式的第一項(xiàng)是選擇待選視差中第二小 (second lowest) 的視差。第二項(xiàng)為選擇待選視差的中值,這樣有利于在物體邊界處保持視差不連續(xù)。
該插值方法獨(dú)立于立體相對(duì)匹配算法。
最后可以再用中值濾波對(duì)得到的視差圖進(jìn)行去噪處理。
最后,作者還介紹了對(duì)于超大幅的航空影像進(jìn)行分塊處理的方法和加速技巧.
以及解釋了文章中不先對(duì)右影像整張影像進(jìn)行極線(xiàn)矯正的原因(對(duì)于推掃式的航空/航天影像,其極線(xiàn)為曲線(xiàn),因此無(wú)法進(jìn)行矯正,只能實(shí)時(shí)計(jì)算)。
但對(duì)于其他普通立體像對(duì),這些內(nèi)容都是不必要的,就不再解釋了。
審核編輯:湯梓紅
-
算法
+關(guān)注
關(guān)注
23文章
4699瀏覽量
94749 -
SGM
+關(guān)注
關(guān)注
0文章
5瀏覽量
10659 -
匹配算法
+關(guān)注
關(guān)注
0文章
24瀏覽量
9437
原文標(biāo)題:一文讀懂經(jīng)典雙目稠密匹配算法SGM
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
雙目立體視覺(jué)三大算法原理及其代碼實(shí)現(xiàn)

雙目影像密集匹配算法的綜合分析
雙目立體視覺(jué)原理大揭秘(一)
【Firefly RK3399試用申請(qǐng)】基于雙目攝像頭的視覺(jué)景深算法開(kāi)發(fā)
雙目視覺(jué)立體匹配算法研究
雙目立體計(jì)算機(jī)視覺(jué)的立體匹配研究綜述

一種基于PatchMatch的半全局雙目立體匹配算法


幾種經(jīng)典的雙目匹配的算法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論