 一文讀懂以太網與CANoe的配置
一文讀懂以太網與CANoe的配置
1 概述
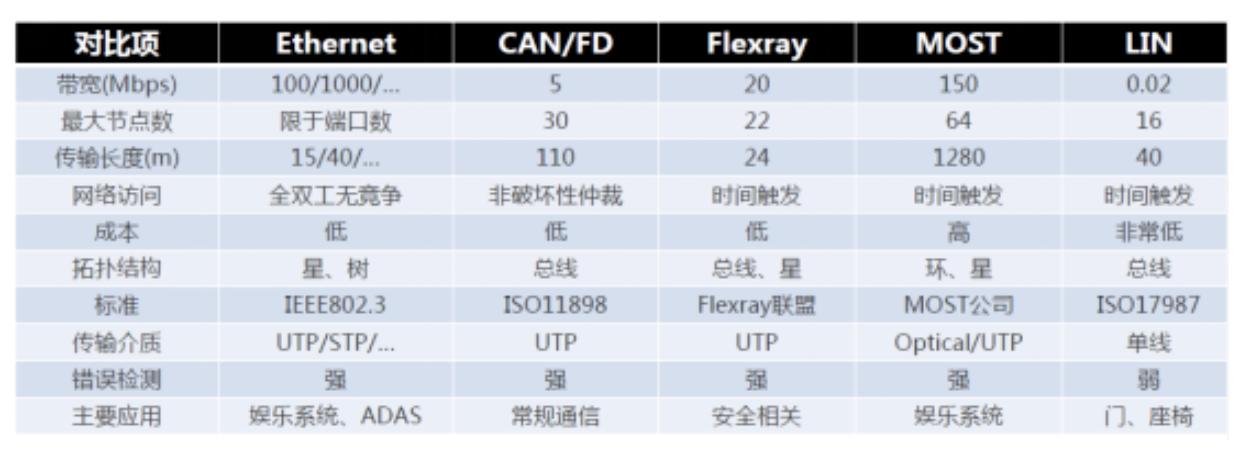
以太網在視頻數據傳輸、寬帶骨干網絡、IP診斷(DoIP)以及電動汽車與充電站之間的通信等領域特別有用。Ethernet.Option擴展 CANoe 以包括對以太網網絡的支持,允許使用接口硬件,例如VN5600系列以太網接口或PC上可用的以太網接口,還擴展了CANoe,以包括特定的協議,如SOME/IP,SOME/IP-SD,IP,TCP,UDP,TSN / AVB等等。
VN5600 系列以太網接口專為仿真和測量目的而設計,具有特定優勢,例如高時間戳分辨率、與其他vector總線接口同步、點對點連接監控和拓撲精確的仿真。VN5600還支持特定于汽車的物理層,例如 100BASE-T1 (OABR) 和 1000BASE-T1這樣就可以直接訪問物理層。
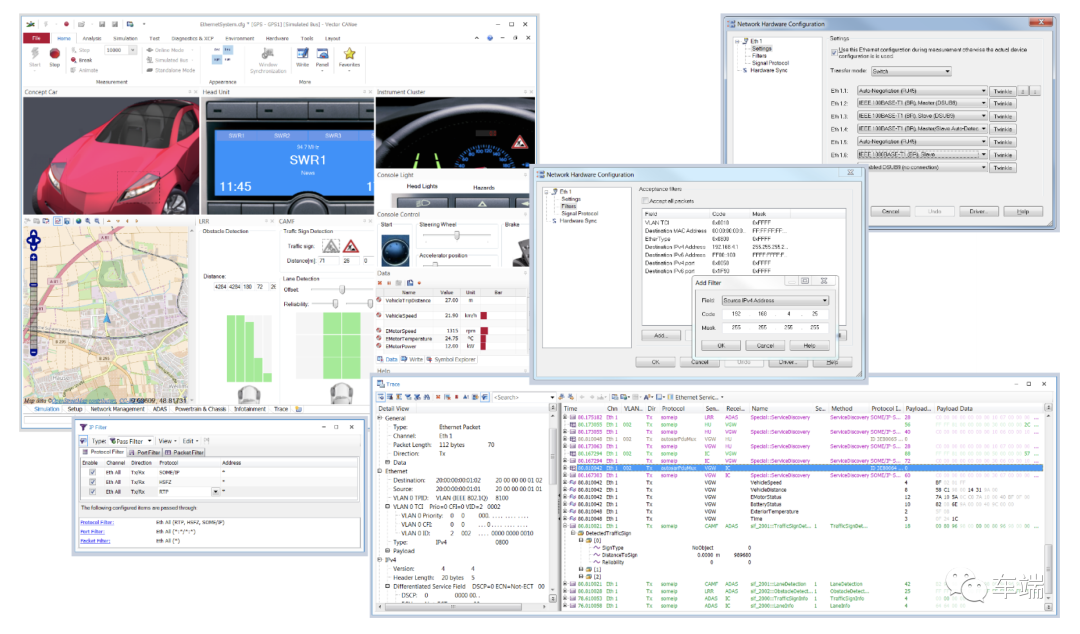
圖1:CANoe .以太網配置,用于在“跟蹤”窗口中模擬和分析信號
CANoe可以模擬多個以太網節點的。每個網絡節點在這里都由其自己的 TCP/IP 堆棧表示。這確保了與真實節點對應的通信行為。此外,通過對以太網數據包進行有針對性的偽造,可以測試可重現的嵌入式實現,并提高其對協議錯誤的魯棒性。通過支持汽車領域典型的數據庫格式(AUTOSAR ARKML和Fibex)和協議(SOME/IP,DoIP等),用戶可以直接訪問應用信號。這大大支持并簡化了通信和應用程序數據的分析。
連同VN5600系列以太網接口,CANoe .Ethernet也適用于測量網關到其他車輛網絡的信號轉換中的延遲時間。例如,這樣就可以跟蹤整個車輛的診斷信息,并檢查其一致性。以太網協議第2層(數據鏈路層)上的錯誤不僅可以可靠地檢測和顯示,還可以被激發。
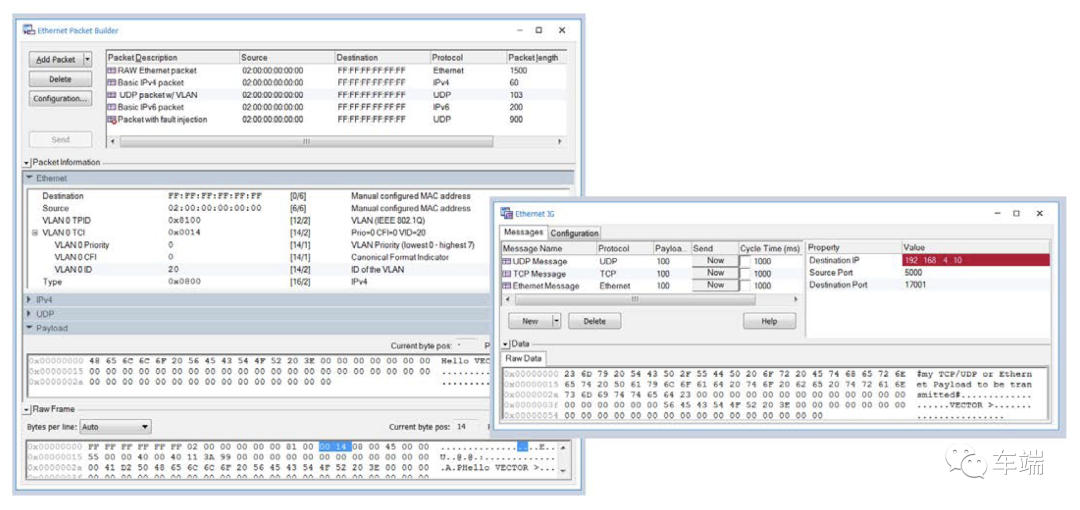
圖 2:以太網數據包生成器和以太網交互式生成器用于方便地創建和發送以太網幀,無需編程
下面具體聊聊在CANoe工程的實操和編程。
2 新建CANoe工程
新建一個普通Demon(ETH工程)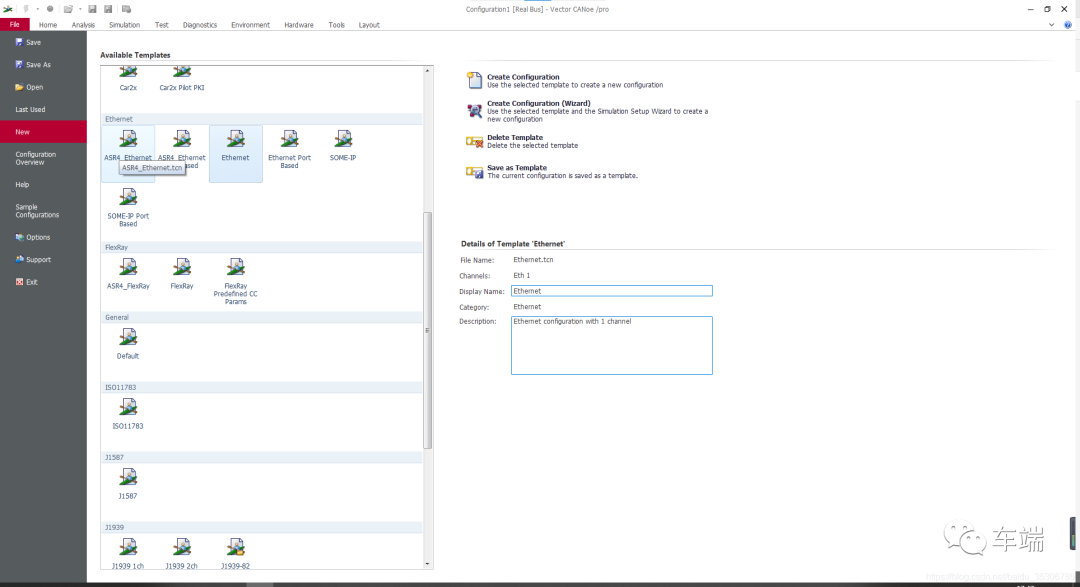
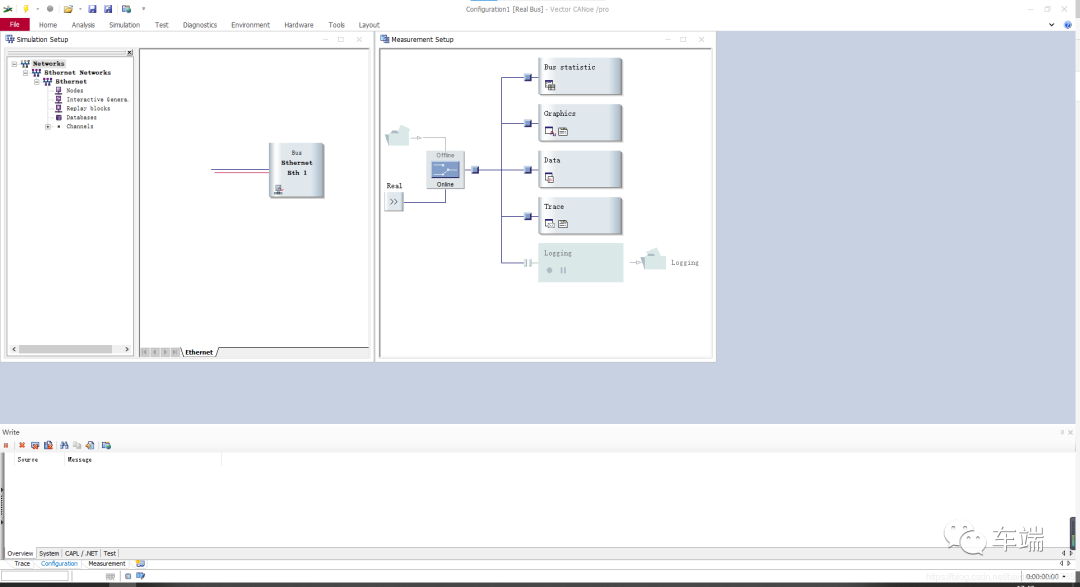
配置Vector Channel
在Option中配置1路以太網(其余無所謂)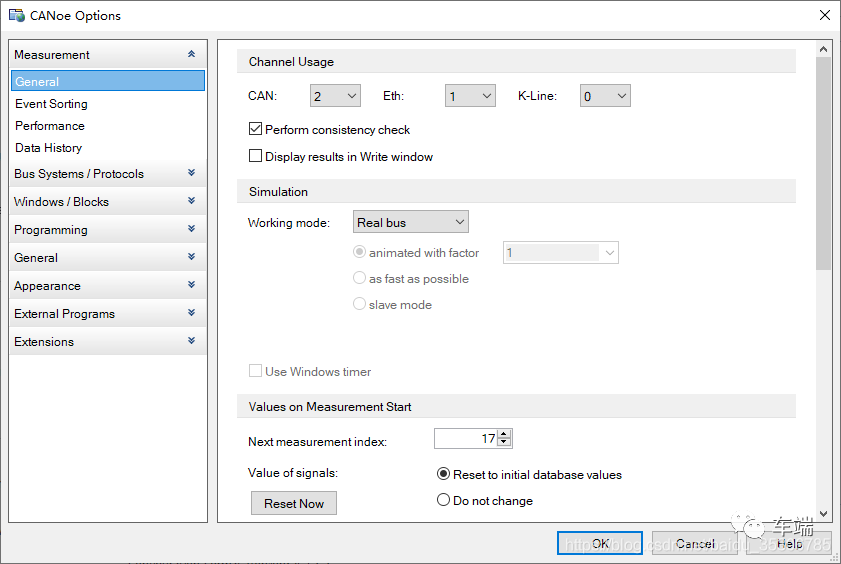
配置HardWare
在AccessMode中,VN56x0設備使用Channel-Base Mode(新驅動中體現,舊驅動則默認為Channel-Base Mode)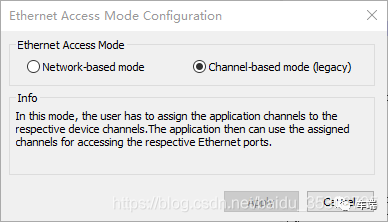
在Device Configuration中使用Direct Connection模式
具體的Channel模式(Master/Slave)則視DUT而定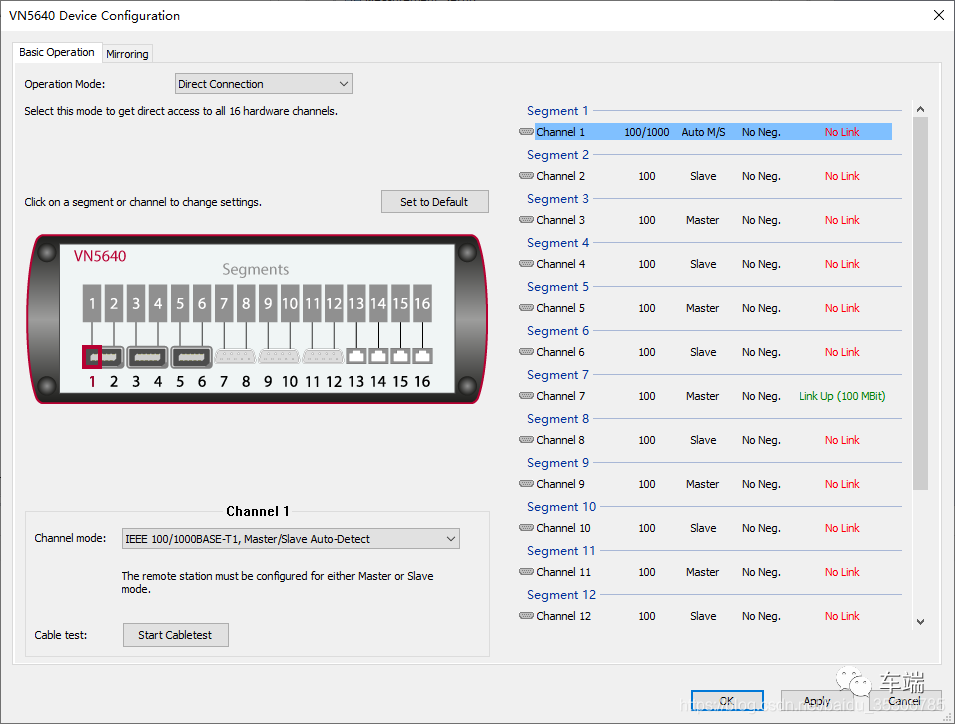
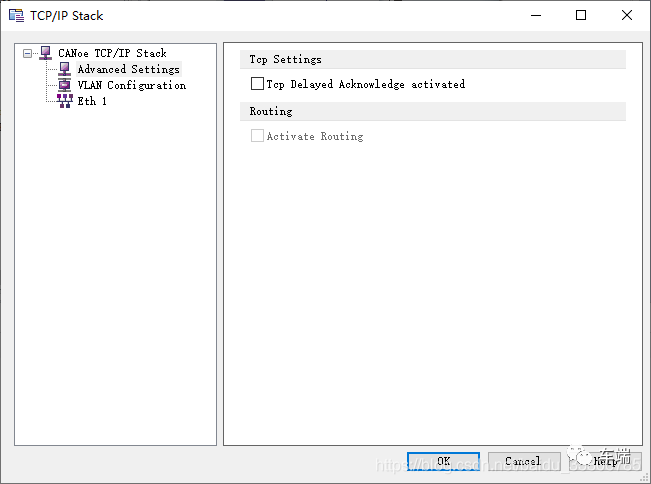
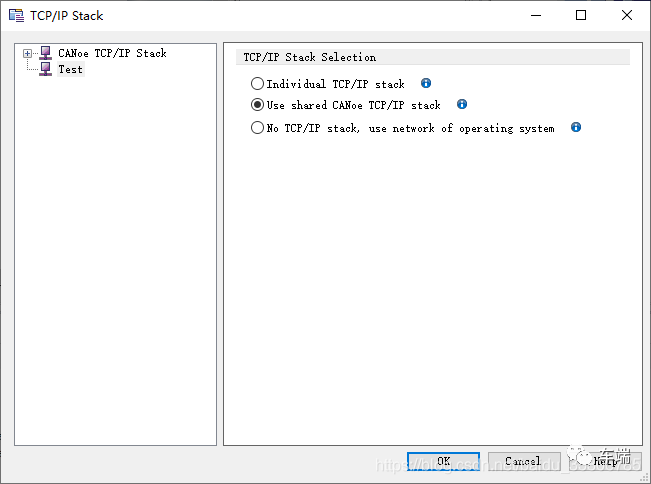
配置IP/Stack
在Simulation中配置V56x0的TCP/IP工作信息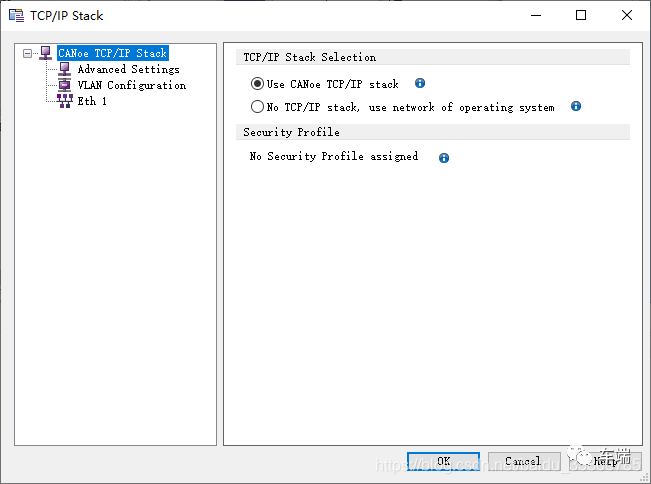
配置8021 Vlan信息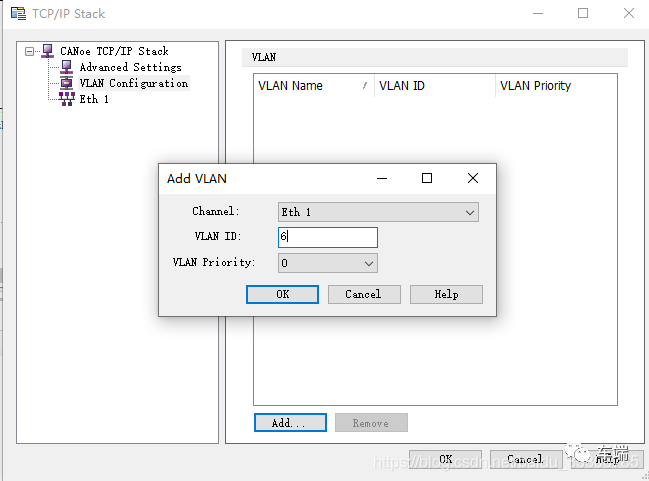
配置TCP/IP信息
需要注意的是如果控制器支持普通多路信息則需要分別配置IP信息(如下圖),詳情請關注公眾號「車端」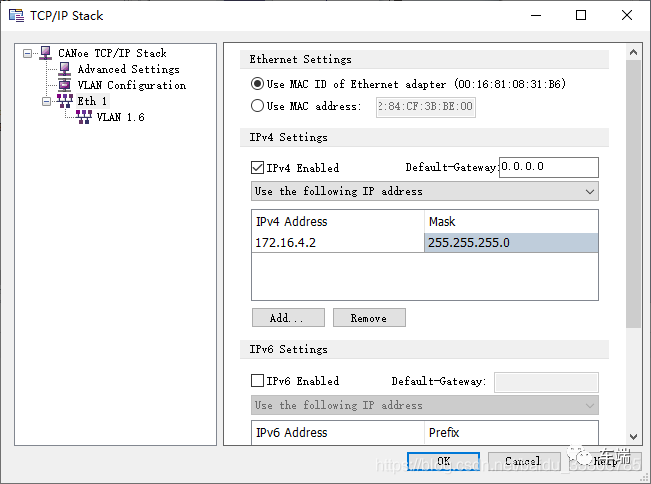
普通信息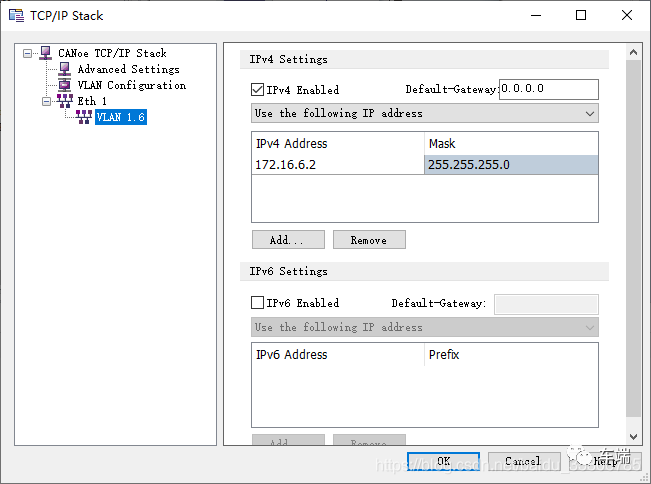
帶Vlan的信息
編寫仿真腳本
新建CAPL節點后需要單獨配置其IP/Stack屬性,具體方式為沿用CANoe硬件設置即可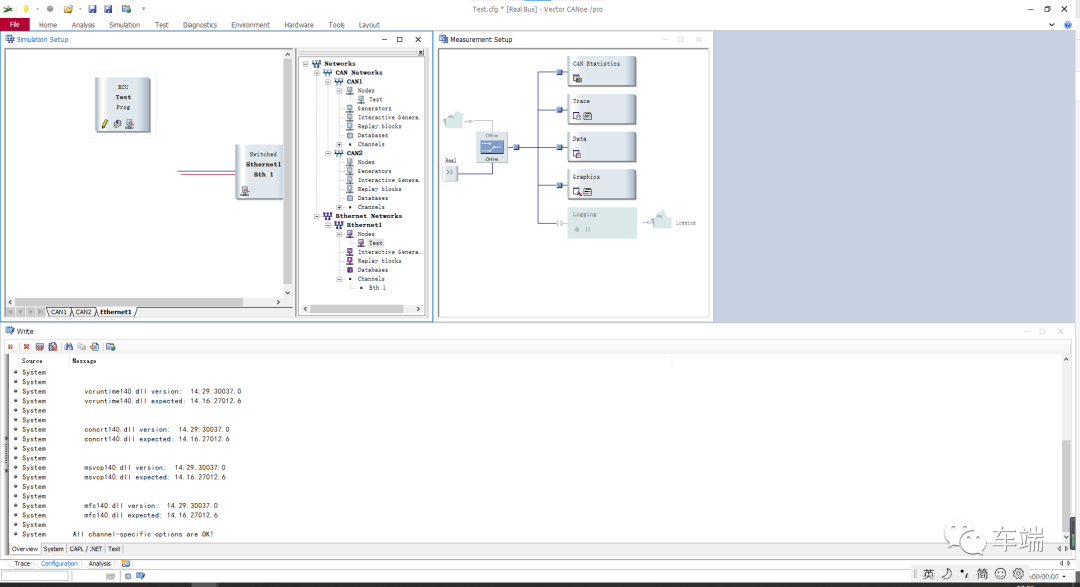
以一個TCP握手為例,代碼如下
// An highlighted block
onkey'i'
{
dwordgClientSocket;//Theclientsocket
IP_EndpointlocalEndpoint;
IP_EndpointremoteEndpoint;
charIPV4_DesADD[16]="172.16.6.4";
dwordPort_Des=51001;
/**************配置信息******************/
remoteEndpoint.ParseEndpointFromString(IPV4_DesADD);
remoteEndpoint.PortNumber=Port_Des;//@sysvar::ServerPortNumber;
localEndpoint=IP_Endpoint(172.16.6.2:0);
/**************開啟本地Socket端口******************/
gClientSocket=TcpOpen(localEndpoint);
/**************開始連接******************/
TcpConnect(gClientSocket,remoteEndpoint);
}
測試結果

審核編輯:湯梓紅
-
以太網
+關注
關注
40文章
5532瀏覽量
173882 -
接口
+關注
關注
33文章
8861瀏覽量
152840 -
CANoe
+關注
關注
4文章
67瀏覽量
8954
原文標題:一文讀懂以太網與CANoe的配置
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一文詳解車載以太網



一文詳解什么是實時以太網



以太網開發測試利器VN5000系列硬件設計
基于以太網網絡接口卡VN5600A的CSM數采設備與CANape、CANoe的配置方案






 工商網監
工商網監
評論