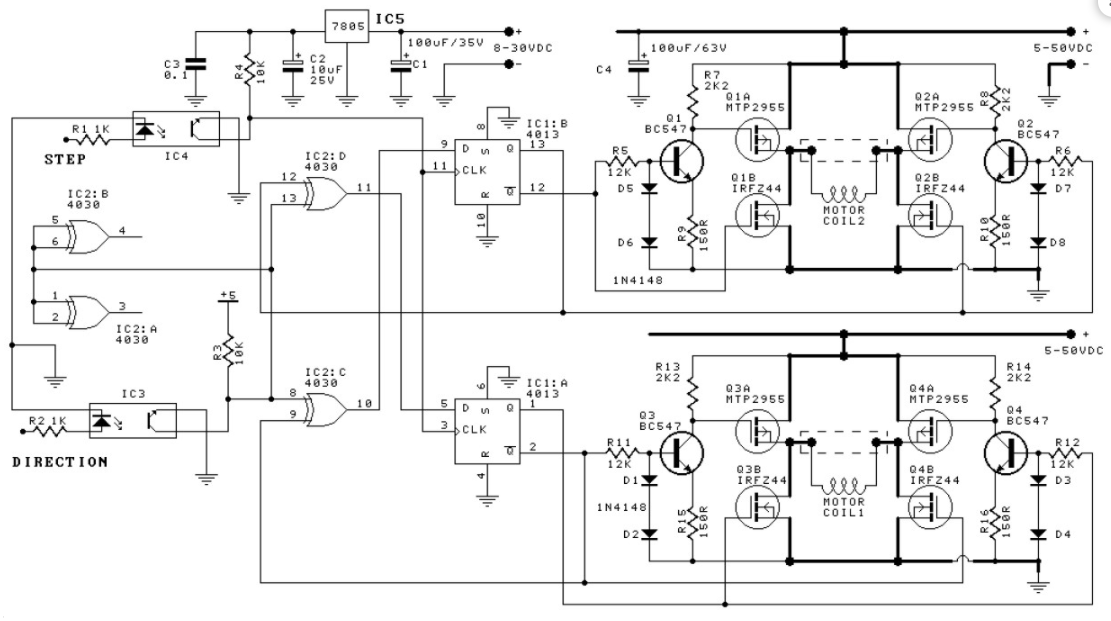
 雙極步進電機驅動器的元件很少
雙極步進電機驅動器的元件很少

作為步進電機復雜驅動電路的替代方案,這種方法采用纖巧的表面貼裝2.8W D類音頻放大器,通常驅動4W或8W揚聲器。兩個內部 H 橋驅動輸出對 OUTR± 和 OUTL±,它們直接連接到步進電機的 A 和 B 繞組。每對承載一個標稱中心頻率為1.22MHz的差分PWM信號。
介紹
雙極單繞組步進電機為給定尺寸提供強大的扭矩,但它們價格昂貴,并且需要八個驅動晶體管:兩個電機繞組中每個四個采用 H 橋配置。由于每個晶體管必須能夠承受過流和短路條件并從中快速恢復,因此典型的電機驅動器電路非常復雜且物理尺寸龐大。
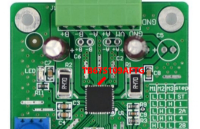
作為此類電機的替代方案,請考慮圖1所示的微型表面貼裝驅動器電路。低EMI、無濾波、2.8W D類音頻放大器(MAX9715、U1)通常用于驅動4Ω或8Ω揚聲器。兩個內部 H 橋驅動輸出對 OUTR± 和 OUTL±,它們直接連接到步進電機的 A 和 B 繞組。每對承載一個標稱中心頻率為1.22MHz的差分PWM信號。
圖1.這種小型表面貼裝電路驅動雙極單線繞組步進電機。
電容 C1、C3、C4 和 C6 為相關的 U1 引腳提供旁路,C8–C9 將輸入帶寬限制為 16Hz,L2-L3 阻止長輸入電纜拾取的任何電噪聲。五世DD輸入由C1、C2和鐵氧體磁珠L1組成的PI噪聲濾波器濾波。C5 和 C7 為 D 類功率放大器輸出提供大容量保持電容。
合適的控制器將數字脈沖饋送到A_Step和B_Step輸入,分別代表電機的左右通道。內部短路和熱保護可保護放大器免受步進電機或其連接引線引起的過流和短路的影響。
表 1 顯示了沿正向驅動典型步進電機所需的A_Step和B_Step脈沖序列(圖 2)。(只需連續應用步驟 0 到 4。要反轉電機,您可以通過從桌子底部開始向上工作來反轉模式。同樣,C8和C9將最小脈沖速率限制為16Hz。如果需要,您可以通過對/SHDN輸入(引腳8)施加邏輯低電平來禁用放大器。
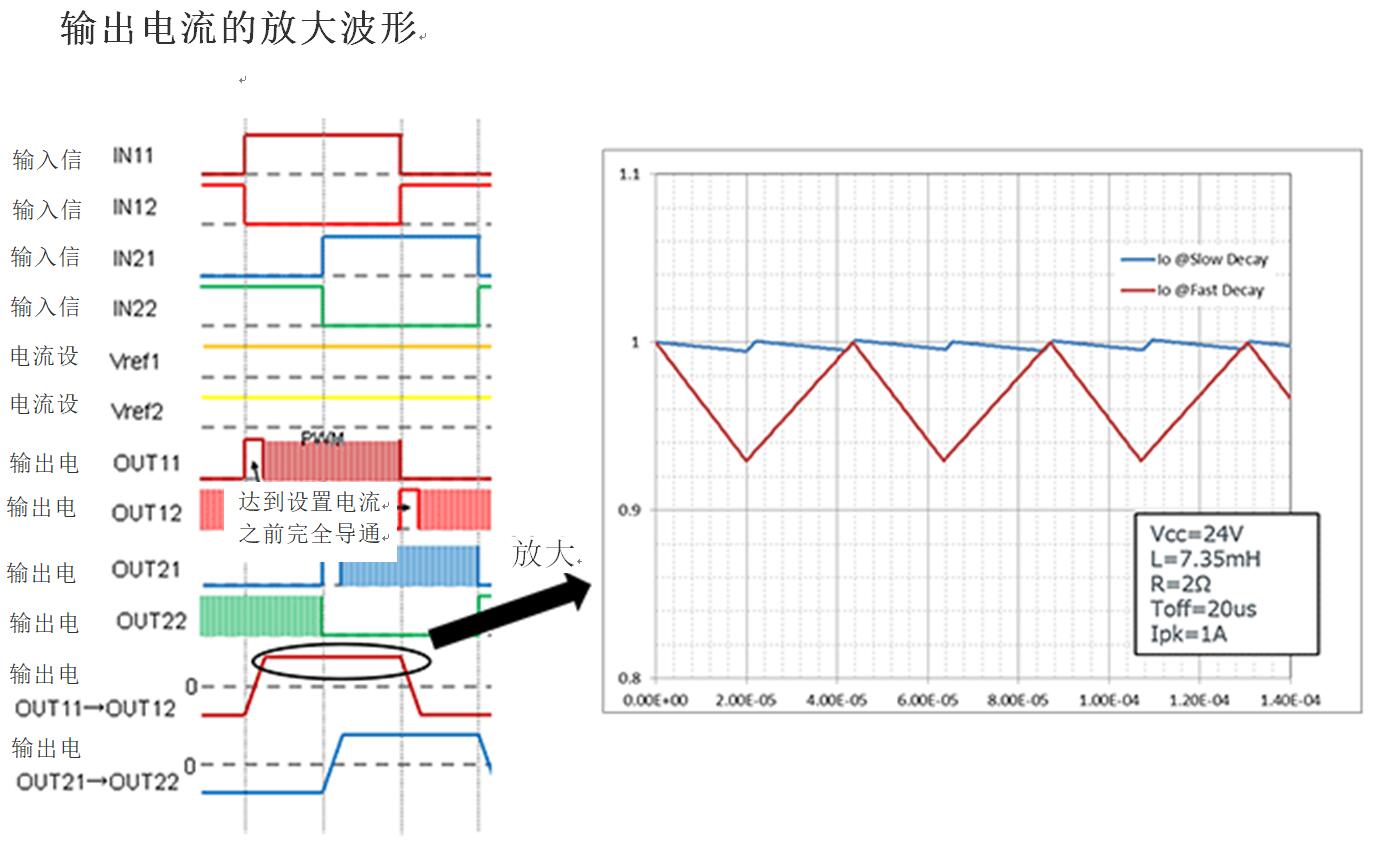
圖2.圖1電路的波形:A_Step輸入(通道1)、B_Step輸入(通道2)、OUTR+(通道3)、OUTR-(通道4)以及電機繞組實際看到的信號(OUTR+減去OUTR-),由示波器計算為“數學”。
| 步# | A_Step | B_Step |
| 0 | H | L |
| 1 | L | L |
| 2 | L | H |
| 3 | H | H |
| 4 | H | L |
審核編輯:郭婷
-
驅動器
+關注
關注
54文章
8697瀏覽量
149998 -
emi
+關注
關注
53文章
3755瀏覽量
131196 -
步進電機
+關注
關注
152文章
3166瀏覽量
149764
發布評論請先 登錄






 工商網監
工商網監
評論