") 紅點(diǎn)定位系統(tǒng)助力車輛自動(dòng)控制的優(yōu)勢(shì)
紅點(diǎn)定位系統(tǒng)助力車輛自動(dòng)控制的優(yōu)勢(shì)
紅點(diǎn)定位與某知名叉車品牌經(jīng)過(guò)三年聯(lián)合開發(fā)和測(cè)試,成功將定位技術(shù)集成至車輛安全控制系統(tǒng),并實(shí)現(xiàn)了集成定位模組車載標(biāo)簽的量產(chǎn)及設(shè)備的前裝。
2022年紅點(diǎn)定位實(shí)現(xiàn)了為該客戶交付21000個(gè)定位基站與10000枚定位模組的目標(biāo)。
典型車輛自動(dòng)化控制場(chǎng)景介紹:
單一庫(kù)房面積500*200m,部署430個(gè)基站,24個(gè)橋節(jié)點(diǎn),150輛叉車,實(shí)現(xiàn)批量化復(fù)制交付。同時(shí)實(shí)現(xiàn)了以下場(chǎng)景的應(yīng)用:
1.叉車從貨架過(guò)道到達(dá)叉車車道之前實(shí)現(xiàn)自動(dòng)減速
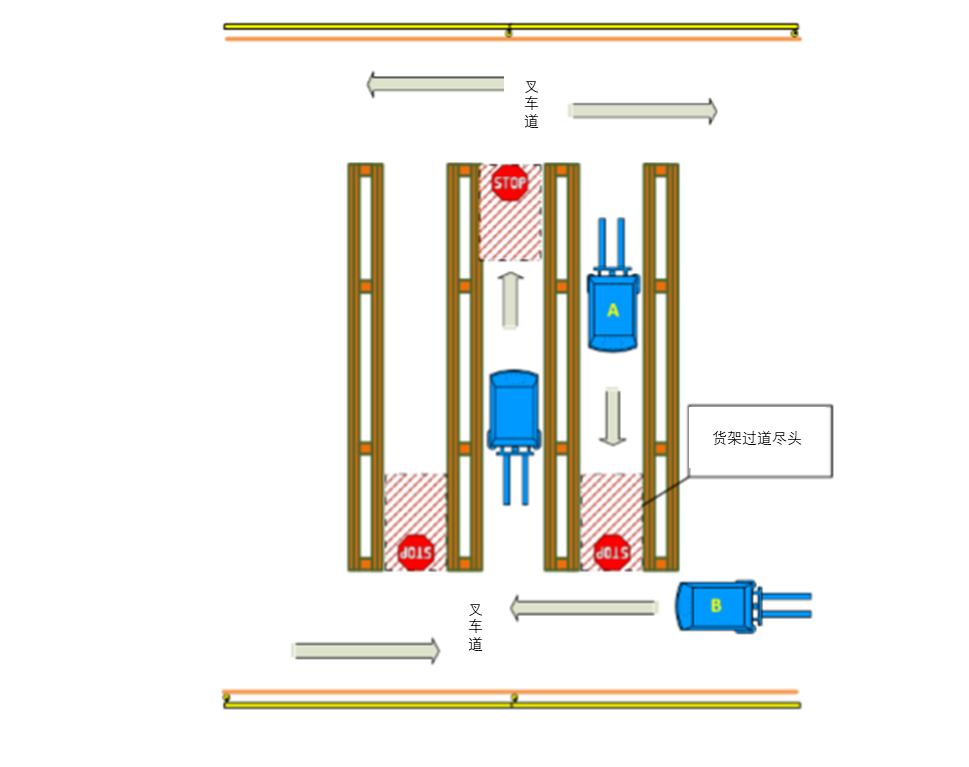
2.關(guān)鍵危險(xiǎn)區(qū)域減速
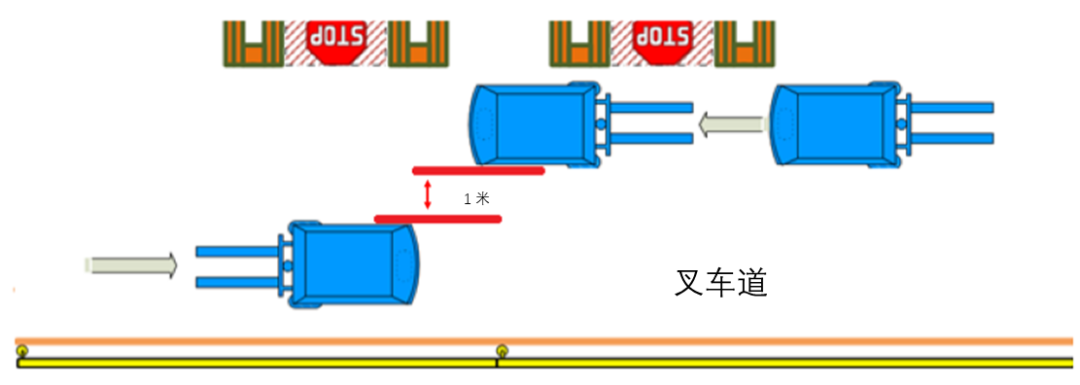
叉車靠近重要危險(xiǎn)區(qū)域(如貨架盡頭的消防栓)時(shí),在至少距離其1米時(shí)實(shí)現(xiàn)自動(dòng)減速。
靠近高空物體危險(xiǎn)區(qū)域時(shí),升高貨物或叉架的叉車在距離指定區(qū)域1米遠(yuǎn)時(shí)實(shí)現(xiàn)自動(dòng)減速,如果沒(méi)有叉架或貨物則可以按照正常速度行駛。
3.擁擠管理
當(dāng)叉車的數(shù)量超過(guò)該區(qū)域允許的容量時(shí),叉車自動(dòng)減速。如果叉車離開此區(qū)域,區(qū)域內(nèi)叉車數(shù)量低于限值,則恢復(fù)區(qū)域內(nèi)叉車的最高速度限值。
4.車車通訊防碰撞管理
不同方向叉車有碰撞風(fēng)險(xiǎn)時(shí),在至少距離1米時(shí)實(shí)現(xiàn)自動(dòng)減速。在相同方向運(yùn)營(yíng)的叉車,速度不同(有碰撞風(fēng)險(xiǎn)),在至少距離1米時(shí)實(shí)現(xiàn)自動(dòng)減速。
在叉車車道,方向不同的叉車,平行間距大于1米時(shí),不影響正常叉車運(yùn)行速度。
進(jìn)入貨架的窄過(guò)道后,叉車與叉車的間距如果小于6米,叉車可實(shí)現(xiàn)自動(dòng)減速。
在兩個(gè)不同過(guò)道作業(yè)的叉車,不會(huì)互相干擾。
紅點(diǎn)定位系統(tǒng)優(yōu)勢(shì):
邊緣計(jì)算:標(biāo)簽側(cè)完成位置解算并可通過(guò)串口輸出位置,適用于(高速與低速)移動(dòng)車輛、AGV等的控制,與RTK定位標(biāo)簽集成實(shí)現(xiàn)室內(nèi)外定位融合。
基于UWB的IPv6 Mesh組網(wǎng):基礎(chǔ)設(shè)施搭建靈活方便,僅需20%基站聯(lián)網(wǎng),即可實(shí)現(xiàn)組網(wǎng)定位,降低網(wǎng)絡(luò)建設(shè)成本,同時(shí)提升網(wǎng)絡(luò)可靠性。
下行飛行時(shí)間差技術(shù):類似于北斗衛(wèi)星定位原理,基站發(fā)射廣播信號(hào),標(biāo)簽接收并解算,標(biāo)簽無(wú)容量限制。
審核編輯:劉清
-
UWB
+關(guān)注
關(guān)注
32文章
1160瀏覽量
62340 -
AGV
+關(guān)注
關(guān)注
27文章
1431瀏覽量
42014 -
mesh組網(wǎng)
+關(guān)注
關(guān)注
0文章
20瀏覽量
2853
原文標(biāo)題:紅點(diǎn)定位助力車輛自動(dòng)控制
文章出處:【微信號(hào):WW_CGQJS,微信公眾號(hào):傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
PLC在多點(diǎn)定位及往返系統(tǒng)中的控制研究
GPS單點(diǎn)定位資料
PLC在多點(diǎn)定位及往返系統(tǒng)中的控制研究
PLC在多點(diǎn)定位及往返系統(tǒng)中的控制研究

電動(dòng)助力車的正確使用與保養(yǎng)
PLC在鑿巖臺(tái)車定向定位自動(dòng)控制系統(tǒng)中的應(yīng)用
基于Smartkey自動(dòng)控制技術(shù)的車輛管理系統(tǒng)設(shè)計(jì)解析

零點(diǎn)定位系統(tǒng)原理
AMF零點(diǎn)定位系統(tǒng)

自動(dòng)控制系統(tǒng)的定義
GNSS中高精度定位定向模組M20助力自動(dòng)駕駛車輛精準(zhǔn)定位
GNSS中高精度定位定向模組M20助力自動(dòng)駕駛車輛精準(zhǔn)定位






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論