") 關(guān)于機(jī)器人的電機(jī)位置測(cè)量元件
關(guān)于機(jī)器人的電機(jī)位置測(cè)量元件

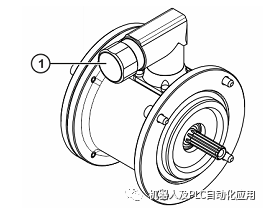
分解器:分解器用于分析處理軸的當(dāng)前位置,是一種旋轉(zhuǎn)式行程測(cè)量系統(tǒng)。
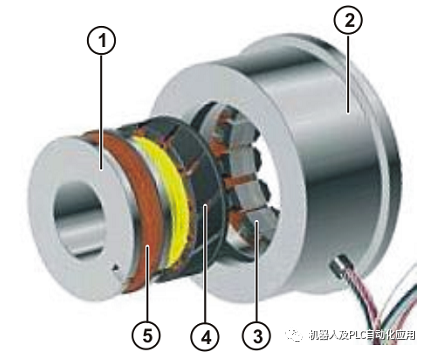
1轉(zhuǎn)子
2定子
3 正弦線圈和余弦線圈
4 轉(zhuǎn)子線圈
5 旋轉(zhuǎn)式變壓器
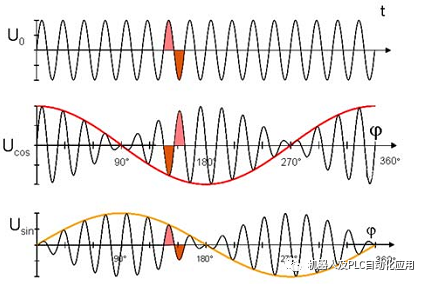
轉(zhuǎn)子 (3)通過旋轉(zhuǎn)式變壓器 (2)接受一個(gè)電壓裝置 (1)的供電 (頻率 = 8kHz)。在定子線圈 (正弦線圈和余弦線圈;5.6)內(nèi),通過感應(yīng)引起與轉(zhuǎn)子位置成比例的電壓。
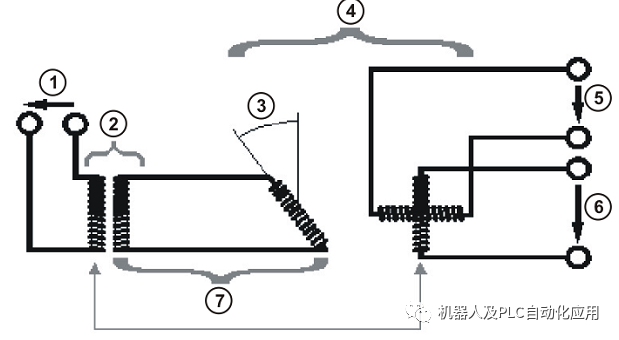
1 輸入電壓 (8 kHz)
2 旋轉(zhuǎn)式變壓器
3 轉(zhuǎn)子線圈
4 自動(dòng)同步機(jī)
5 正弦線圈
6 余弦線圈
7 轉(zhuǎn)子
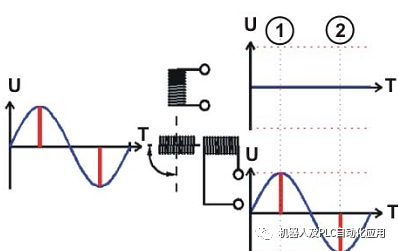
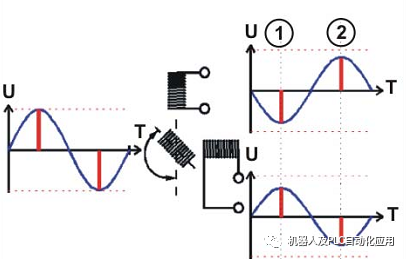
電壓隨著轉(zhuǎn)子的旋轉(zhuǎn)而變化。
感應(yīng)引起的電壓在兩個(gè)測(cè)量點(diǎn) (1,2)接受探測(cè)和評(píng)估。
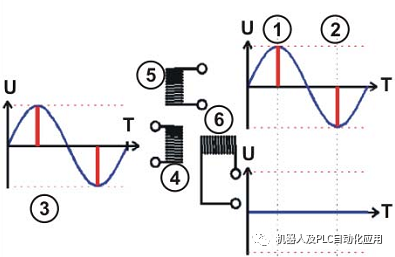
1 第一探測(cè)點(diǎn)
2 第二探測(cè)點(diǎn)
3輸入電壓
4轉(zhuǎn)子線圈
5 正弦線圈
6 余弦線圈
U 電壓
T 時(shí)間
旋轉(zhuǎn) 30 度角時(shí)的分解器感應(yīng)
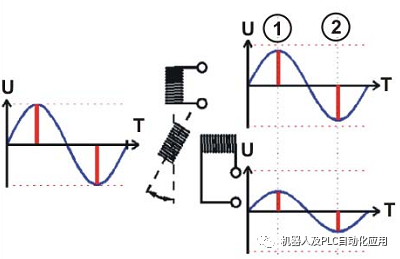
旋轉(zhuǎn) 90 度角時(shí)的分解器感應(yīng)
旋轉(zhuǎn) 135 度角時(shí)的分解器感應(yīng)
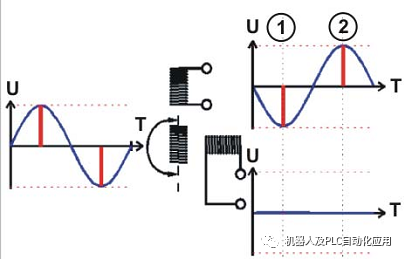
旋轉(zhuǎn) 180 度角時(shí)的分解器感應(yīng)
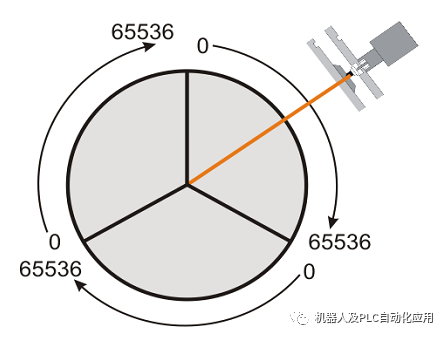
在庫卡采用的分解器中,各設(shè)有 3 個(gè)正弦線圈和余弦線圈。
這樣,電機(jī)每一圈機(jī)械式旋轉(zhuǎn)就等于分解器電旋轉(zhuǎn) 3x120 度角。
電旋轉(zhuǎn)一圈等于 65536 個(gè)增量 (16 比特)。
分解器每一圈機(jī)械式旋轉(zhuǎn)則等于 196608 個(gè)增量 (3*65536 增量)。
分解器以增量的形式提供位置數(shù)據(jù) (16 Bit)。
這些位置數(shù)據(jù)在 RDC 內(nèi)乘上一個(gè)內(nèi)部演算系數(shù),并換算成電機(jī)角度度數(shù)。
在 EDS 里,可保存每條軸的絕對(duì)位置值 (64 Bit)。
從該時(shí)間點(diǎn)開始,只能繼續(xù)利用電機(jī)角度值來計(jì)算。
在校準(zhǔn)位置并非所有軸都已設(shè)為 0° 或 90°,而是準(zhǔn)確數(shù)據(jù)已保存在機(jī)器數(shù)據(jù)里 ($mames)
$mames[n]:軸n 的機(jī)械和數(shù)學(xué)零點(diǎn)之間的偏移
REAL $MAMES[12]
$MAMES[1]=-20.0000
$MAMES[2]=-120.000
$MAMES[3]=110.000
$MAMES[4]=0.0
$MAMES[5]=0.0
$MAMES[6]=0.0
零點(diǎn)校正就是對(duì)機(jī)器人的分解器進(jìn)行校準(zhǔn).
機(jī)器人位置在極短時(shí)間間隔內(nèi)、機(jī)器人停止運(yùn)行時(shí)或機(jī)器人控制系統(tǒng)關(guān)機(jī)時(shí)被
持續(xù)保存。
1.如果兩個(gè)數(shù)值相等,則將絕對(duì)位置應(yīng)用到增量里,機(jī)器人也就準(zhǔn)備就緒可以運(yùn)行。
2.如果兩個(gè)數(shù)值存在偏差,則必須重新校準(zhǔn)機(jī)器人。HMI 里將顯示與此相關(guān)的一條訊息.
RDC -旋轉(zhuǎn)變壓器數(shù)字轉(zhuǎn)換器
RDC -分解器數(shù)字轉(zhuǎn)換器將分解器的模擬數(shù)值轉(zhuǎn)換為數(shù)字信號(hào),以便將其傳輸至控制系統(tǒng)。
RDC 安裝在金屬外殼中,RDC 盒。 根據(jù)機(jī)器人的不同型號(hào),或者固定在機(jī)器人支腳處或者在轉(zhuǎn)盤處。
針對(duì)附加軸還可加裝其他 RDC,通過 KCB - KUKA 控制器總線相互連接。
RDC 的工作任務(wù):
生成所需的分解器激勵(lì)電壓用于 8 個(gè)軸。
借助安全技術(shù)分解器 (SIL2)采集八個(gè)電機(jī)的位置數(shù)據(jù)。
采集八個(gè)電機(jī)的工作溫度。
采集 RDC 的溫度。
與機(jī)器人控制器進(jìn)行通訊。
監(jiān)控旋轉(zhuǎn)變壓器的線路是否中斷。
評(píng)估 EMD (EMD = Electronic M astering D evice,即電子控制裝置)。
將數(shù)據(jù)保存于存儲(chǔ)卡(EDS =Electronic D ata Storage,電子數(shù)據(jù)存儲(chǔ)器)
安全的雙通道分解器評(píng)估
利用兩個(gè) FPGA = (F ield Programmable Gate Array,即現(xiàn)場(chǎng)可編程門陣列)可進(jìn)行安全的雙通道式分解器評(píng)估和分解器數(shù)據(jù)分析處理。
兩個(gè) FPGA 的任務(wù)相同,并對(duì)檢測(cè)結(jié)果進(jìn)行比對(duì)。
只有這樣可確保至控制器的通訊連接。
如果出現(xiàn)故障,EtherCAT 連接將會(huì)中斷。
RDC 印刷電路板上的接口
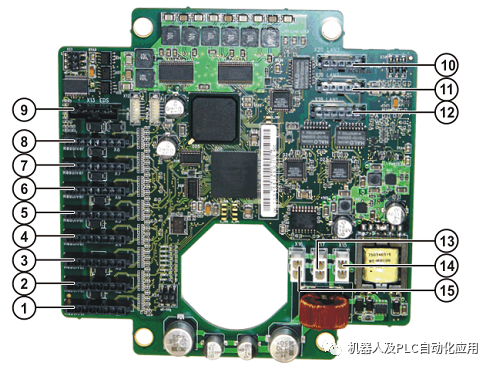
1 .. 8 : X1 .. X8 ,1 至 8 號(hào)軸的分解器接口 9: X13,RDC 存儲(chǔ)卡的 EDS 接口 10:X20, EMD 11: X19, KCB OUT 12: X18, KCB IN 13: X17, EMD 供電電源 14: X15, 供電電源 IN
15: X16, 電源 OUT(下一 KCB 用戶)
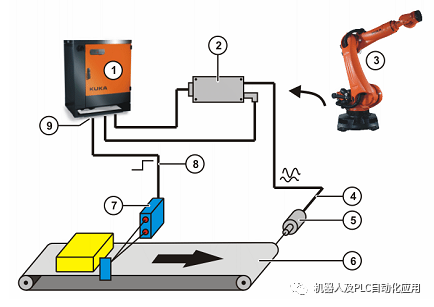
帶旋轉(zhuǎn)變壓器的輸送器 輸送器的輸送運(yùn)動(dòng)可以用旋轉(zhuǎn)變壓器檢測(cè)。旋轉(zhuǎn)變壓器連接在機(jī)器人底座的RDC 空閑通道上。根據(jù)型號(hào)的不同,RDC 上有大量不同的空閑通道用于連接旋轉(zhuǎn)變壓器。如有必要,可通過另一個(gè) RDC 提供額外的通道。每個(gè)機(jī)器人控制器最多可以配置 5 個(gè)輸送器。 同步開關(guān)(例如光柵)可用于工件檢測(cè)。為此,同步開關(guān)連接到機(jī)器人控制器其中一個(gè)可用的快速測(cè)量輸入端上。 將連接線的平插頭通過 SKINTOP 電纜鎖緊接頭插到空置的接口上。電纜鎖緊接頭位于 RDC 箱的側(cè)面。插頭自動(dòng)鎖定。
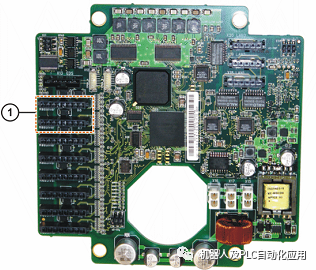
1 RDC 上空置的接口 將連接線的另一端連接到旋轉(zhuǎn)變壓器上。
將旋轉(zhuǎn)變壓器電纜連接在旋轉(zhuǎn)變壓器上
編輯:何安
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29706瀏覽量
212662 -
電機(jī)
+關(guān)注
關(guān)注
143文章
9291瀏覽量
149304 -
測(cè)量
+關(guān)注
關(guān)注
10文章
5235瀏覽量
113409
原文標(biāo)題:機(jī)器人的電機(jī)位置測(cè)量元件及RDC板V1
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
機(jī)器人輔助測(cè)量系統(tǒng)——靈活加工
【mBot申請(qǐng)】視覺機(jī)器人
工業(yè)機(jī)器人的產(chǎn)業(yè)鏈
如何選擇機(jī)器人電機(jī)
盤點(diǎn)機(jī)器人常用的三種電機(jī)
拆開工業(yè)機(jī)器人,讓你見識(shí)機(jī)器人驅(qū)動(dòng)系統(tǒng)中的電機(jī)種類
拆開工業(yè)機(jī)器人,讓你見識(shí)機(jī)器人驅(qū)動(dòng)系統(tǒng)中的電機(jī)種類
安川機(jī)器人伺服電機(jī)維修,常見機(jī)器人伺故障服電機(jī)和維修方法
ABB焊接機(jī)器人伺服電機(jī)維修常見故障相關(guān)資料分享
ABB焊接機(jī)器人伺服電機(jī)維修常見故障相關(guān)資料分享
機(jī)器人舵機(jī)調(diào)試系統(tǒng)
電機(jī)位置編碼器接口設(shè)計(jì)
如何使用電機(jī)位置傳感器來測(cè)量定子與轉(zhuǎn)子之間的相對(duì)位置





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論