 探究驅動電機用霍爾傳感器的設計方法 2
探究驅動電機用霍爾傳感器的設計方法 2
4 霍爾設計
通過上述典型案例分析,可將霍爾安裝方式分為“有骨架”和“無骨架”兩類。對比兩類霍爾傳感器可得出下表:
表4.1 有骨架霍爾與無骨架霍爾對比
| 項目 | 單位 | 有骨架 | 無骨架 |
|---|---|---|---|
| 軸向高度(高于繞組部分) | mm | 13-18 | 5-8 |
| 定子鐵芯預留安裝位置(軸向) | mm | 10 | 5 |
| 定子鐵芯預留安裝位置(徑向) | mm | 5 | 2 |
| 定子鐵芯預留安裝位置(弧長) | mm | 8 | 5 |
| 結構 | / | 霍爾傳感器、線、PCB板、骨架、灌封料 | 霍爾傳感器、線、PCB板 |
通過對比可知有骨架型霍爾在體積和結構復雜程度上都高于無骨架霍爾。本節將會以有骨架霍爾為例,講解霍爾傳感器設計方法。
4.1 霍爾插槽的選擇
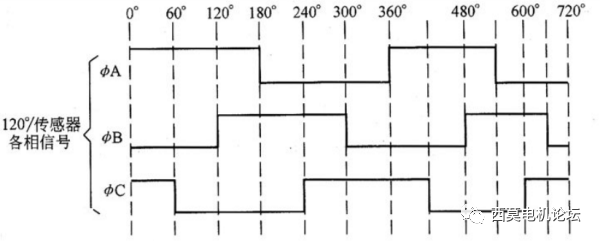
霍爾插槽,即霍爾安裝位置,一般該位置可位于齒中心或槽中心,兩者均可準確反應磁場變化情況。不論是齒中心還是槽中心,均需要按照電機所選擇的槽極配合來選擇在哪一槽(齒)安裝霍爾元器件,當三個元器件安裝完成后能夠以60°或120°相位角進行輸出即為正常。對于60°與120°的選擇,需要以控制器程序為準,采用不同的角度,輸出信號也不同,如下表所示
表4.2 120°分布情況下霍爾輸出情況
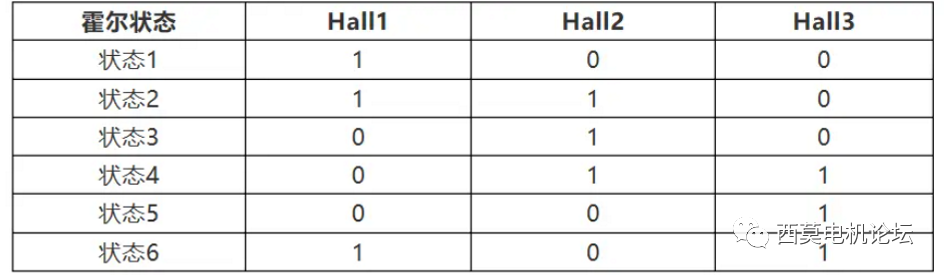
表4.3 60°分布情況下霍爾輸出情況
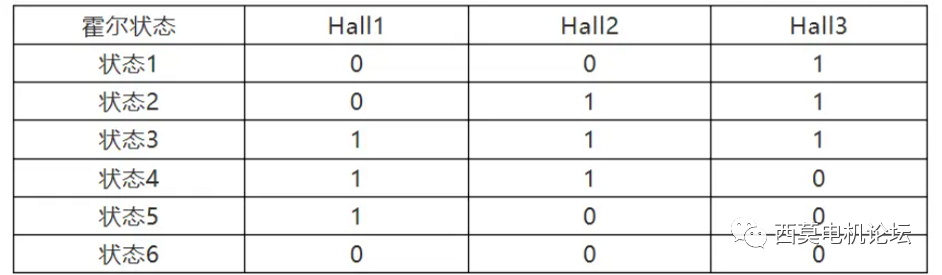
大部分控制器廠商均以120°分布的輸出信號來編寫程序,若采用60°則需要重新調試程序,建議以120°分布作為設計值。
當確定好電角度設計值之后,就需要確定機械角度,來決定安裝的具體槽(齒),以一對極電機為例:
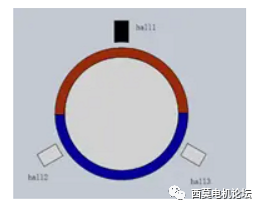
圖4.1 120°分布霍爾安裝位置示意圖
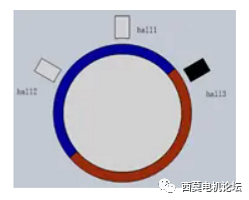
圖4.2 60°分布霍爾安裝位置示意圖
通過圖片可以看出,對于一對極電機,電角度120°分布,機械角度就需要120°分布;電角度60°分布,機械角度就需要60°分布。
當電機極數增多時,霍爾布置的機械角度就會隨之縮小,例如四對極電機采用120°分布,則霍爾安裝的機械角度等于120/4=30°。計算過程如下:
再以典型的8極48槽電機為例:
1 若選擇的電角度分布為120°,則霍爾安裝機械角度需間隔30°。
2 考慮到電機槽數為48,每槽所占機械角度為7.5°。
3 確定每4槽(齒)安裝一個霍爾傳感器即可。
圖4.3 8極48槽電機120°分布霍爾安裝示意圖
通過上述步驟計算,即可確定各霍爾安裝位置,對于不同槽極配合的電機也可通過相同的方法確定。第一步確定霍爾電角度分布,第二步確定霍爾機械角度分布,第三步計算需要間隔多少槽安裝霍爾傳感器。
4.2 霍爾徑向位置的選擇
在確定霍爾插槽位置后,需要確定霍爾在徑向上所處的位置,即確定霍爾檢測到磁場的具體位置。該位置的選擇直接影響霍爾跳變的精度,即跳變沿是否會超前或滯后于換向點。
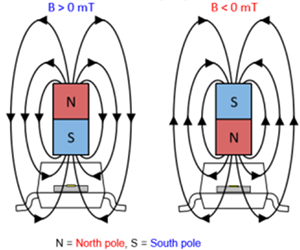
圖4.4 磁鐵磁力線分布圖
通過上圖可以看出,離磁鐵越遠的位置磁力線越稀疏,即磁場強度越弱,離磁鐵越近的位置磁力線越密,即磁場強度越強。根據前述的霍爾原理,當檢測到磁場強度高于或者低于閾值時,霍爾信號發生跳變,所以選擇檢測的具體位置即是選擇霍爾跳變的電角度。
在考慮該距離時需要對轉子磁場的分布情況進行仿真或測量,同時需要考慮霍爾安裝位置是否會對鐵芯產生影響,是否會對裝配造成不便。下面以8極48槽電機為例,來確定霍爾徑向檢測位置:
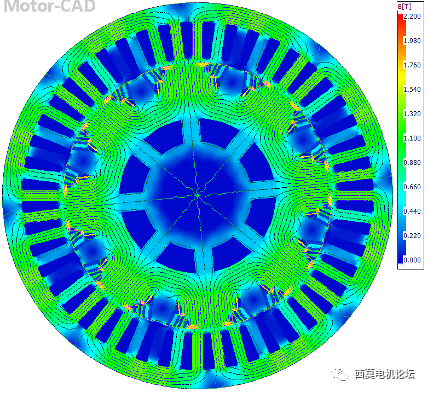
圖4.5 8極48槽電機磁密分布
1 定子繞組在經過Q軸時會產生不同向電勢(反電勢過零點),所以霍爾需要檢測是否經過Q軸,遂取Q軸磁場進行分析。
2 通過對計算出的磁場強度進行測量,可以得出在圖示測量點處磁場強度為80Gs
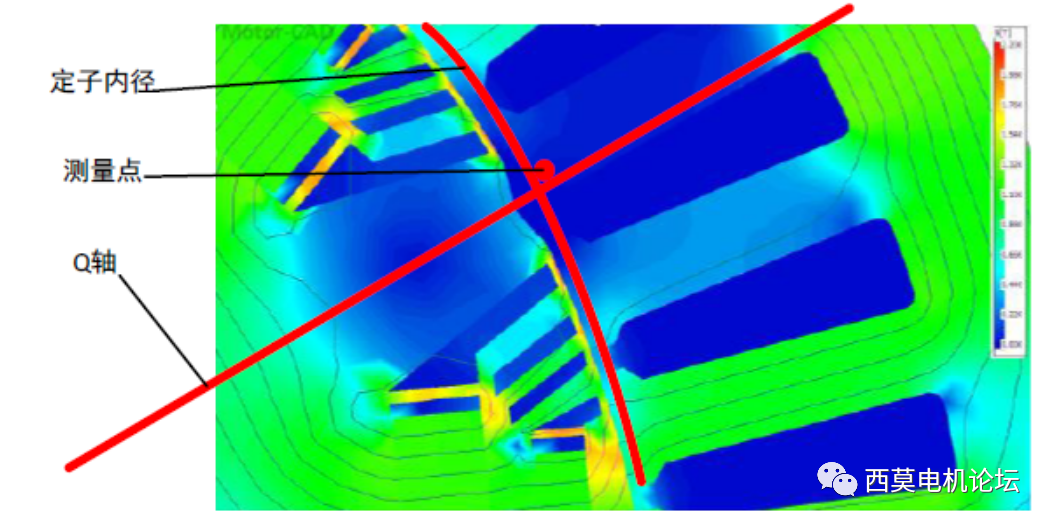
圖4.6 Q軸放大圖
3 查閱芯片資料后選取跳變閾值為80Gs芯片作為霍爾芯片,封裝選擇插件形式。
4 確認霍爾檢測點位置是否與第二步中挑選的位置相同,如下圖所示,圖中“E”點位置即為霍爾檢測點,其到霍爾元器件表面位置約為0.5mm。
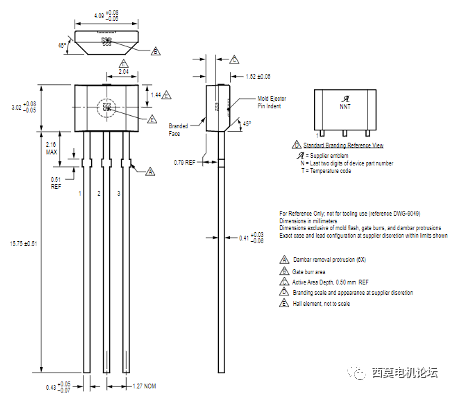
圖4.7 封裝尺寸圖
5 “E”點到表面位置與測量點距定子內徑距離相同,可以選擇該封裝霍爾傳感器使用,設計時使器件表面與定子內表面在同一平面即可。
4.3 霍爾軸向位置的選擇
在選定霍爾安裝槽及徑向位置后,需要確認霍爾軸向的安裝位置,即深入定子鐵芯的距離。通過上一小節的封裝尺寸圖可以看出,霍爾檢測點距霍爾上端面有1.44mm的距離,軸向位置的基礎要求是轉子磁場能夠包裹霍爾檢測點,所以霍爾至少需要深入定子鐵芯1.44mm以上,對于一般設計來說,將整個霍爾元器件插入定子鐵芯較為合理,所以在設計時元器件下表面一般低于鐵芯端面1mm,如下圖所示:
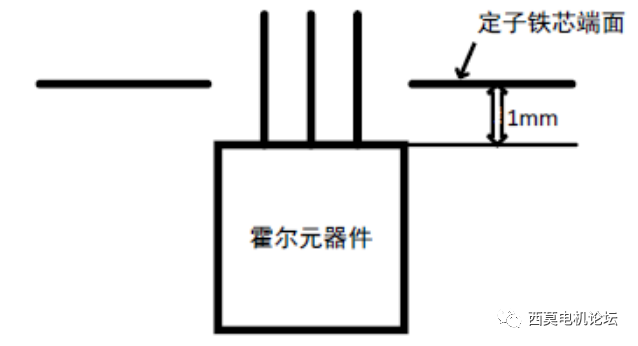
圖4.8 霍爾軸向安裝位置示意圖
4.4 霍爾定位的選擇
霍爾定位方式視具體情況而定,對于定位較差的霍爾,可能會出現以下問題:
1 霍爾信號不變,不能隨磁場變化做出跳變。
2 霍爾信號跳變沿與反電勢過零點的電角度差過大。
3 霍爾信號占空比不準確,不是精確的50%占空比。
4 兩相霍爾信號之間的電角度差值與設計值不符。
出現以上問題的原因均有可能是因為霍爾元器件外表面法線與電機徑向不平行。所以在設計定位方式時需要以“霍爾元器件外表面法線與電機徑向平行”為目標。
定位方式一般分為兩種,一種是骨架定位,一種是鐵芯開槽定位。
4.4.1 鐵芯開槽定位:
鐵芯開槽定位(前文輪轂電機方案)需要在定子沖片上單獨沖壓出霍爾安裝槽,使用沖片的精度保證霍爾安裝的精度,由于量產鐵芯在沖壓模具上能夠保證非常小的尺寸公差,所以該方案在霍爾信號精度上較為可靠,但由于霍爾元器件裸露在電機箱體內,對電機箱體的密封性提出了較高要求,需要在電機全壽命周期內保證箱體不進水、泥、沙等雜質,否則很容易對電機傳感器造成損傷。
4.4.2 骨架定位:
在定子鐵芯工作環境不穩定的情況下,一般選擇使用霍爾骨架定位,例如電機運行過程中有泥沙進入、電機所處箱體內有其他旋轉部件、工作環境中金屬雜質較多等情況,使用帶骨架的霍爾能夠保證沒有裸露出的導電體,線束也能夠按照骨架限制的方向引出,有著優秀的裝配一致性。
骨架定位形式主要結構如下圖所示:
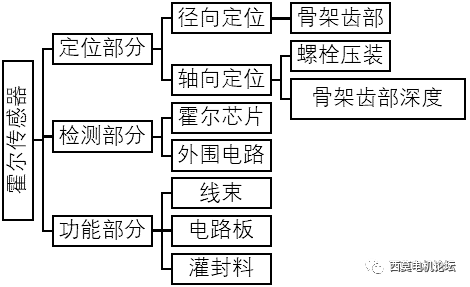
圖4.12 骨架主要結構圖
骨架的主要定位方式如下:
1 霍爾骨架齒部外表面與定子鐵芯槽開口處配合,該配合需要槽開口在沖制時留出足夠的寬度,骨架齒部外表面設計形狀與該槽開口相配合,配合后使得骨架齒部外表面不超過定子鐵芯外表面,同時保證裝配后骨架不松動。
2 霍爾傳感器通過骨架齒部內的霍爾插槽進行定位,插槽形狀應與霍爾元器件的封裝形式相同,并且確保霍爾元器件外表面法線與電機徑向平行。
3 通過螺栓與定子鐵芯進行固定,確保軸向不發生竄動。
-
汽車電動
+關注
關注
0文章
11瀏覽量
10204 -
霍爾傳感器
+關注
關注
28文章
754瀏覽量
64188 -
驅動電機
+關注
關注
9文章
423瀏覽量
31214
發布評論請先 登錄
霍爾傳感器芯片選擇和使用的影響
什么是霍爾傳感器?
探究驅動電機用霍爾傳感器的設計方法 1
探究驅動電機用霍爾傳感器的設計方法 3





 工商網監
工商網監
評論