 Free RTOS的任務通知-1
Free RTOS的任務通知-1
每個任務都有一個32位的通知值,該值在創建任務時初始化為零。
配置相關資源
//為1時開啟任務通知
#define configUSE_TASK_NOTIFICATIONS 1
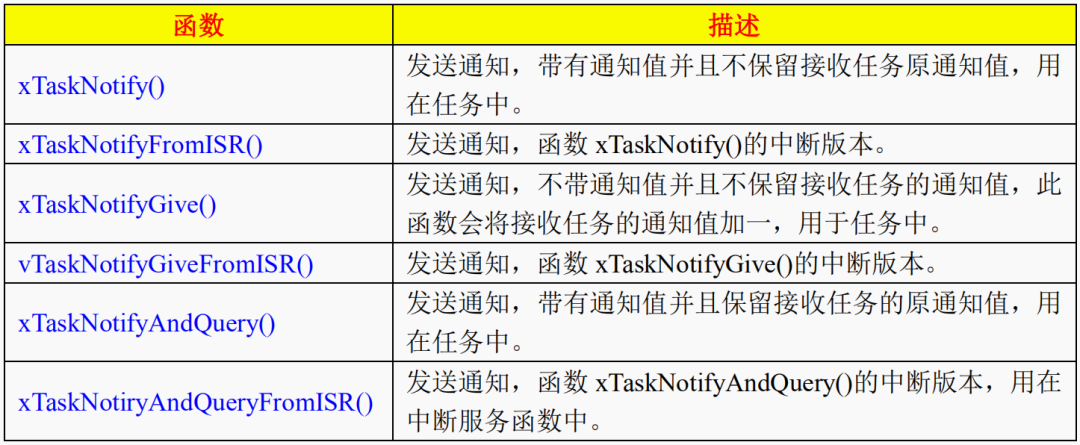
發送
BaseType_t xTaskNotifyGive( TaskHandle_t xTaskToNotify );
參數:
xTaskToNotify:被通知并使其通知值遞增的任務句柄
接收
uint32_t ulTaskNotifyTake( BaseType_t xClearCountOnExit, TickType_t xTicksToWait );
參數:
xClearCountOnExit:是否需要清零
xTicksToWait:等待時間
實驗程序
#include "stm32f10x.h"
#include
#include "FreeRTOS.h"
#include "task.h"
void KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定義結構體變量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOE,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0; //選擇你要設置的IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPD;//下拉輸入
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //設置傳輸速率
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3|GPIO_Pin_2|GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; //上拉輸入
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOE,&GPIO_InitStructure);
}
void USART_init(uint32_t bound)
{
GPIO_InitTypeDef GPIO_InitStruct; //定義GPIO結構體變量
USART_InitTypeDef USART_InitStruct; //定義串口結構體變量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_USART1,ENABLE); //使能GPIOC的時鐘
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9; //配置TX引腳
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; //配置PA9為復用推挽輸出
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA9速率
GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函數
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10; //配置RX引腳
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING; //配置PA10為浮空輸入
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; //配置PA10速率
GPIO_Init(GPIOA,&GPIO_InitStruct); //GPIO初始化函數
USART_InitStruct.USART_Mode=USART_Mode_Tx|USART_Mode_Rx; //發送接收模式
USART_InitStruct.USART_Parity=USART_Parity_No; //無奇偶校驗
USART_InitStruct.USART_BaudRate=bound; //波特率
USART_InitStruct.USART_StopBits=USART_StopBits_1; //停止位1位
USART_InitStruct.USART_WordLength=USART_WordLength_8b; //字長8位
USART_InitStruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //無硬件數據流控制
USART_Init(USART1,&USART_InitStruct); //串口初始化函數
USART_Cmd(USART1,ENABLE); //使能USART1
}
int fputc(int ch,FILE *f) //printf重定向函數
{
USART_SendData(USART1,(uint8_t)ch); //發送一字節數據
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET); //等待發送完成
return ch;
}
#define START_TASK_PRIO 1 //任務優先級
#define START_STK_SIZE 128 //任務堆棧大小
TaskHandle_t StartTask_Handler; //任務句柄
void Start_Task(void *pvParameters);//任務函數
#define Send_TASK_PRIO 2 //任務優先級
#define Send_STK_SIZE 50 //任務堆棧大小
TaskHandle_t SendTask_Handler; //任務句柄
void Send_Task(void *p_arg); //任務函數
#define Read_1_TASK_PRIO 3 //任務優先級
#define Read_1_STK_SIZE 50 //任務堆棧大小
TaskHandle_t ReadTask_1_Handler; //任務句柄
void Read_1_Task(void *p_arg); //任務函數
#define Read_2_TASK_PRIO 3 //任務優先級
#define Read_2_STK_SIZE 50 //任務堆棧大小
TaskHandle_t ReadTask_2_Handler; //任務句柄
void Read_2_Task(void *p_arg); //任務函數
int main( void )
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//設置系統中斷優先級分組 4
KEY_Init();
USART_init(9600);
//創建開始任務
xTaskCreate(
(TaskFunction_t )Start_Task, //任務函數
(const char* )"Start_Task", //任務名稱
(uint16_t )START_STK_SIZE, //任務堆棧大小
(void* )NULL, //傳遞給任務函數的參數
(UBaseType_t )START_TASK_PRIO, //任務優先級
(TaskHandle_t* )&StartTask_Handler //任務句柄
);
vTaskStartScheduler(); //開啟調度
}
//開始任務函數
void Start_Task(void *pvParameters)
{
taskENTER_CRITICAL(); //進入臨界區
//創建 Send_Task 任務
xTaskCreate(
(TaskFunction_t )Send_Task,
(const char* )"Send_Task",
(uint16_t )Send_STK_SIZE,
(void* )NULL,
(UBaseType_t )Send_TASK_PRIO,
(TaskHandle_t* )&SendTask_Handler
);
//創建 Read_1_Task 任務
xTaskCreate(
(TaskFunction_t )Read_1_Task,
(const char* )"Read_1_Task",
(uint16_t )Read_1_STK_SIZE,
(void* )NULL,
(UBaseType_t )Read_1_TASK_PRIO,
(TaskHandle_t* )&ReadTask_1_Handler
);
//創建 Read_2_Task 任務
xTaskCreate(
(TaskFunction_t )Read_2_Task,
(const char* )"Read_2_Task",
(uint16_t )Read_2_STK_SIZE,
(void* )NULL,
(UBaseType_t )Read_2_TASK_PRIO,
(TaskHandle_t* )&ReadTask_2_Handler
);
vTaskDelete(StartTask_Handler); //刪除開始任務
taskEXIT_CRITICAL(); //退出臨界區
}
//Send_Task 任務函數
void Send_Task(void *pvParameters)
{
while(1)
{
if(GPIO_ReadInputDataBit( GPIOE, GPIO_Pin_2)==0)
{
xTaskNotifyGive( ReadTask_1_Handler );
}
if(GPIO_ReadInputDataBit( GPIOE, GPIO_Pin_3)==0)
{
xTaskNotifyGive( ReadTask_2_Handler );
}
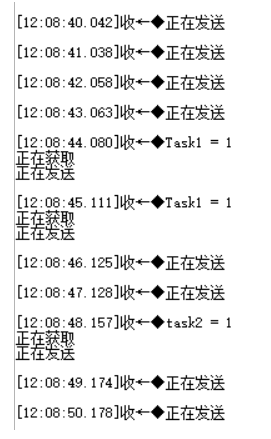
printf("正在發送n");
vTaskDelay(1000);
}
}
//Read_1_Task 任務函數
void Read_1_Task(void *pvParameters)
{
uint32_t xReturn = 0;
while(1)
{
xReturn = ulTaskNotifyTake( pdTRUE, //是否清零
portMAX_DELAY );//等待時間
printf("Task1 = %dn",xReturn);
printf("正在獲取n");
vTaskDelay(1000);
}
}
//Read_2_Task 任務函數
void Read_2_Task(void *pvParameters)
{
uint32_t xReturn = 0;
while(1)
{
xReturn = ulTaskNotifyTake( pdTRUE, //是否清零
portMAX_DELAY );//等待時間
printf("task2 = %dn",xReturn);
printf("正在獲取n");
vTaskDelay(1000);
}
}
實驗現象
--END--
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
FreeRTOS
+關注
關注
12文章
490瀏覽量
63781 -
任務
+關注
關注
1文章
20瀏覽量
8629 -
初始化
+關注
關注
0文章
50瀏覽量
12054
發布評論請先 登錄
相關推薦
熱點推薦
Free RTOS移植問題的解決辦法?
按照原子哥的free rtos抑制說明文檔做第一個工程,改完代碼編譯出現xPortSysTickHandler()函數未定義,頭文件中加入task.h和FreeRTOS.h。實在找不出問題所在,,,there must be anther problem???
發表于 06-11 07:57
FreeRTOS的直接任務(消息)通知
速度。 嵌入式專欄 1 寫在前面幾乎所有RTOS操作系統都提供了隊列和信號量的功能,對于大部分新手來說,使用隊列和信號量是必備技能。 但是,在大多數情況下,他們都是使用“中介對象”進行通信,而并非“直接任務消息”通信。 通過“中
RTOS任務的堆棧大小與代碼量有啥關系嗎?
最近有小伙伴問了這樣一個問題:我有個任務中的代碼量很多,是不是這個任務的堆棧需要分配很大才行? 下面就圍繞任務代碼量,以及堆棧進行描述相關內容。 1RTOS

使用任務通知提高RTOS應用的效率
在實時嵌入式系統中,性能和資源效率是決定設計成敗的關鍵因素。傳統的實時操作系統(RTOS)提供了如隊列、信號量和事件組機制,實現任務之間的同步和通信。FreeRTOS/SAFERTOS還提供一種方法可以使這些過程更快、更輕量化,即任務





 工商網監
工商網監
評論