") 控制激光驅(qū)動(dòng)器的方法:POT和DAC
控制激光驅(qū)動(dòng)器的方法:POT和DAC
激光模塊設(shè)計(jì)人員可以使用固定電阻器、機(jī)械電位器、數(shù)字電位器或數(shù)模轉(zhuǎn)換器 (DAC) 來(lái)控制激光驅(qū)動(dòng)器的調(diào)制和偏置電流。可編程方法(POT或DAC)的優(yōu)點(diǎn)是制造過(guò)程可以自動(dòng)化,并且可以應(yīng)用數(shù)字控制(例如,補(bǔ)償溫度)。使用 POT 可能是一種比 DAC 更簡(jiǎn)單的方法。使用POT可能會(huì)有輕微的成本優(yōu)勢(shì),但相對(duì)于設(shè)計(jì)的其他部分,這通常并不重要。使用DAC具有諸多優(yōu)勢(shì),包括改善線性度(轉(zhuǎn)化為軟件實(shí)現(xiàn)的便利性和達(dá)到所需精度的能力)、更高的電路板密度、更寬的分辨率范圍、更好的優(yōu)化范圍、負(fù)電壓激光驅(qū)動(dòng)器的易用性以及單元間的一致性。
本應(yīng)用筆記討論了在這些應(yīng)用中使用這些器件的優(yōu)勢(shì),并概述了激光驅(qū)動(dòng)器中的偏置電路要求。
來(lái)自不同供應(yīng)商的多個(gè)激光驅(qū)動(dòng)器系列設(shè)計(jì)為使用電阻來(lái)控制激光驅(qū)動(dòng)器提供的調(diào)制和偏置電流。電位計(jì)和數(shù)模轉(zhuǎn)換器(DAC)也可用于控制這些參數(shù)。對(duì)于每種控制方法,都有影響激光驅(qū)動(dòng)器整體性能的好處和權(quán)衡。要充分了解激光驅(qū)動(dòng)器控制系統(tǒng)選擇的優(yōu)缺點(diǎn),必須熟悉激光驅(qū)動(dòng)器和光纖模塊設(shè)計(jì)。
最初,電阻用于控制調(diào)制和偏置電流,如許多激光驅(qū)動(dòng)器數(shù)據(jù)手冊(cè)所示。雖然電阻是最便宜的元件選擇,但不允許實(shí)時(shí)調(diào)整,在系統(tǒng)校準(zhǔn)制造步驟中調(diào)整它們既困難又耗時(shí)。更好的解決方案是使用機(jī)械電位計(jì)(可變電阻器),它允許手動(dòng)調(diào)整。
隨著體積的增加和自動(dòng)化變得越來(lái)越重要,機(jī)械電位計(jì)可以被數(shù)字電位計(jì)取代。數(shù)字電位計(jì)還提供有源數(shù)字控制。
有源數(shù)字控制是一種監(jiān)控參數(shù)(如輸出功率)的技術(shù),方法是用ADC測(cè)量參數(shù),用數(shù)字引擎處理參數(shù),然后利用這些信息調(diào)整參數(shù)(如激光驅(qū)動(dòng)器輸出電流)。有源數(shù)字引擎可以補(bǔ)償激光二極管的溫度依賴性。
DAC可用于電位計(jì)可以使用的大多數(shù)地方,并且在某些設(shè)計(jì)中具有多種優(yōu)勢(shì)。
激光驅(qū)動(dòng)器的控制部分
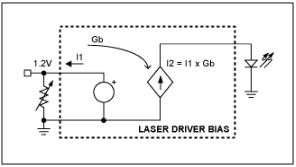
許多激光驅(qū)動(dòng)器具有非常簡(jiǎn)單的結(jié)構(gòu),可以轉(zhuǎn)換編程電阻(R程序)的輸出偏置和調(diào)制深度電流(見(jiàn)圖1)。通常,激光驅(qū)動(dòng)器電流控制引腳后面的內(nèi)部電路(即I國(guó)防部我偏見(jiàn)) 包括一個(gè)內(nèi)部基準(zhǔn)電壓源。該內(nèi)部電壓源的輸出電流被測(cè)量,并通過(guò)電流放大器放大,電流放大器的輸出是激光驅(qū)動(dòng)器的輸出。連接在地和這些控制引腳之間的簡(jiǎn)單電阻器可為該電路提供一致的控制電流。請(qǐng)注意,激光驅(qū)動(dòng)器只關(guān)心從該引腳拉出的電流量,而不關(guān)心連接到它的電阻器的值。因此,電阻可以替換為控制該電流的DAC,如下文所述。通常,電流放大器的增益約為100-200 (mA/mA),典型輸出電流高達(dá)50-80mA。
圖1.用于檢測(cè)編程電阻值的激光驅(qū)動(dòng)器內(nèi)部架構(gòu)。
數(shù)字電位器選項(xiàng)(和優(yōu)勢(shì))
使用數(shù)字電位器代替控制電阻是最簡(jiǎn)單、最明顯的方法(見(jiàn)圖2)。
圖2.使用數(shù)字電位計(jì)對(duì)激光驅(qū)動(dòng)器進(jìn)行編程。
但是,可用電位器的電阻值可能與所需的編程電流范圍不精確一致。可以使用額外的電阻更直接地將電位器的范圍映射到所需的電流范圍(見(jiàn)圖3)。請(qǐng)注意,電流隨電阻的倒數(shù)而變化。數(shù)字電位計(jì)通常具有均勻間隔的步進(jìn),這意味著編程電流的最終步長(zhǎng)在電位器的低電阻范圍內(nèi)會(huì)很大,而在高電阻范圍內(nèi)會(huì)很小。
圖3.使用優(yōu)化的編程范圍電位計(jì)對(duì)激光驅(qū)動(dòng)器電流進(jìn)行編程。
DAC 選項(xiàng)(和優(yōu)勢(shì))
可以使用DAC代替電位器來(lái)控制激光驅(qū)動(dòng)器電流。電壓輸出DAC與串聯(lián)電阻一起使用,使得從激光驅(qū)動(dòng)器控制引腳汲取的電流是編程電流(見(jiàn)圖4)。DAC的理想滿量程/基準(zhǔn)電壓與特定激光驅(qū)動(dòng)器內(nèi)部的基準(zhǔn)電壓相同。它可以更大,但DAC的可用范圍受到影響
圖4.使用 DAC 對(duì)激光驅(qū)動(dòng)器電流進(jìn)行編程。
設(shè)計(jì)工程師考慮使用DAC的一些原因包括:
線性度:數(shù)字代碼與電位器產(chǎn)生的控制電流之間的關(guān)系為1/R關(guān)系。這是 DAC 的線性關(guān)系。線性設(shè)計(jì)有兩個(gè)主要優(yōu)點(diǎn):
1. DAC線性設(shè)計(jì)具有非常規(guī)則且可預(yù)測(cè)的步長(zhǎng),因此很容易計(jì)算設(shè)計(jì)是否可以校準(zhǔn)到適當(dāng)?shù)淖罱K目標(biāo)精度。如上所述,由于1/R關(guān)系,電位器設(shè)計(jì)可能會(huì)出現(xiàn)不希望的步長(zhǎng)問(wèn)題,因此設(shè)計(jì)可能無(wú)法達(dá)到最終精度。
2. 使用線性控制環(huán)路軟件算法,用于基于測(cè)量模塊輸出功率來(lái)調(diào)節(jié)輸出電流的控制算法可以簡(jiǎn)化設(shè)計(jì)和優(yōu)化吞吐量。
密度/電路板尺寸:在某些設(shè)計(jì)中,DAC實(shí)際上可以使電路板布局更小。由于通常還有其他控制參數(shù)需要在電路板上使用DAC,因此可以選擇具有2個(gè)額外通道的DAC(用于激光驅(qū)動(dòng)器調(diào)制深度和偏置電流控制電流)。因此,該功能可以通過(guò)設(shè)計(jì)的另一部分已經(jīng)需要的另一個(gè)IC來(lái)實(shí)現(xiàn),而不是為此目的添加新的IC。
分辨率:分辨率大于8位的電位器通常不可用。DAC具有廣泛的分辨率。
范圍優(yōu)化:DAC的滿量程電壓范圍可以直接對(duì)應(yīng)于電阻選擇所需的電流范圍。如果激光驅(qū)動(dòng)器可用的編程范圍需要改變,使用DAC方法,只需更換電阻器即可;使用POT方法時(shí),可能需要將POT更改為不同的POT,因?yàn)殡娮柚登度朐赑OT中。
雙極性易于實(shí)現(xiàn):如果激光驅(qū)動(dòng)器必須采用-5V電壓軌運(yùn)行,則可供選擇的電位器更少。使用雙極性DAC或類似的電壓轉(zhuǎn)換技術(shù)可以實(shí)現(xiàn)替代方案。
單元間一致性:大多數(shù)數(shù)字電位器的電阻值誤差較大(30%或更多)。DAC和電阻器的誤差可能明顯低于1%,具體取決于所使用的基準(zhǔn)電壓源和電阻器。該誤差在校準(zhǔn)過(guò)程中被修剪掉。但是,在校準(zhǔn)算法的誤差預(yù)算/校準(zhǔn)范圍內(nèi)需要考慮誤差。此外,如果需要了解所需電壓的分布以了解校準(zhǔn)過(guò)程的控制,如果控制更一致,則數(shù)據(jù)會(huì)更好。
結(jié)論
激光模塊設(shè)計(jì)人員可以使用固定電阻器、機(jī)械電位器、數(shù)字電位器或DAC來(lái)控制激光驅(qū)動(dòng)器的調(diào)制和偏置電流。
可編程方法(POT或DAC)的優(yōu)點(diǎn)是制造過(guò)程可以自動(dòng)化,并且可以應(yīng)用數(shù)字控制(例如補(bǔ)償溫度)。
使用 POT 可能是一種比 DAC 更簡(jiǎn)單的方法。使用POT可能會(huì)有輕微的成本優(yōu)勢(shì),但相對(duì)于設(shè)計(jì)的其他部分,這通常并不重要。
使用DAC具有諸多優(yōu)勢(shì),包括改善線性度(轉(zhuǎn)化為軟件實(shí)現(xiàn)的便利性和達(dá)到所需精度的能力)、更高的電路板密度、更寬的分辨率范圍、更好的優(yōu)化范圍、負(fù)電壓激光驅(qū)動(dòng)器的易用性以及單元間的一致性。
審核編輯:郭婷
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
54文章
8462瀏覽量
148414 -
電阻器
+關(guān)注
關(guān)注
21文章
3931瀏覽量
63025 -
dac
+關(guān)注
關(guān)注
43文章
2341瀏覽量
192656
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
ATLS1A202D恒流激光驅(qū)動(dòng)器
高壓恒流激光驅(qū)動(dòng)器控制效果好
超低噪聲二極管激光驅(qū)動(dòng)器精度高
恒流激光驅(qū)動(dòng)器ATLSXA202D系列評(píng)估板
1.25Gbps激光驅(qū)動(dòng)器的研究
MAX3740激光驅(qū)動(dòng)器的精確功率控制
如何與MAX3735或MAX3741緊湊型激光驅(qū)動(dòng)器連接
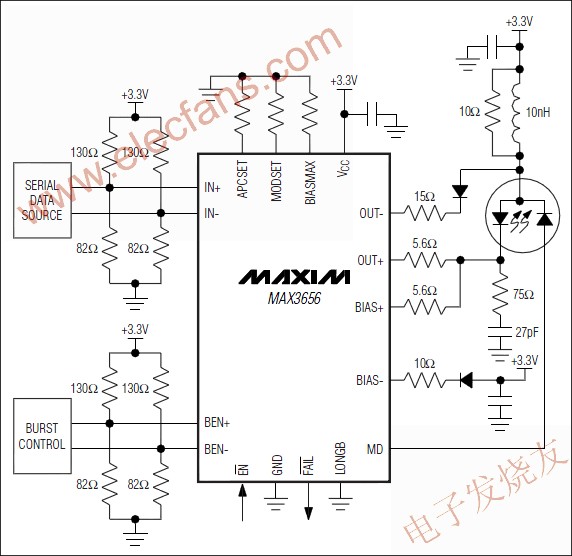
MAX3656突發(fā)模式激光驅(qū)動(dòng)器
應(yīng)用筆記-校準(zhǔn)激光驅(qū)動(dòng)器POT和DAC

世界上最先進(jìn)的激光驅(qū)動(dòng)器ATLS15A218
如何設(shè)計(jì)帶有GaN ToF激光驅(qū)動(dòng)器的LiDAR系統(tǒng)
如何與MAX3736緊湊型激光驅(qū)動(dòng)器接口
如何連接DS1862與內(nèi)置APC環(huán)路的激光驅(qū)動(dòng)器
數(shù)字控制電位器和電阻器與激光驅(qū)動(dòng)器接口





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論