 柔軟的水凝膠偽裝機器人
柔軟的水凝膠偽裝機器人

這篇文章來源于DevicePlus.com英語網站的翻譯稿。
如今,機器人并不只是朝著類人機器人方向發展,它們還會模仿海洋生物的樣子。受到柳葉鰻(鰻魚的透明幼體)的啟發,MIT工程師們研發出了多種能夠完成多項任務——比如游泳、踢橡膠球、捕捉和釋放水中的活魚等——的柔軟偽裝機器人。這些機器人是由什么構成的呢?它們完全由透明的水凝膠材料(一種水聚合材料,主要成分是水)制成。
由MIT機械工程副教授Xuanhe Zhao和研究生Hyunwoo Yuk領導的研究團隊一直致力于開發持久耐用、靈活、同時又能完成強大任務的水凝膠配方。該團隊已經制造出多種不同種類、不同功能的水凝膠機器人:能夠上下卷曲的附肢;可以來回擺動的鰭狀模型;能夠有效捕捉、釋放的手狀夾持器(圖2、圖3和圖4)。
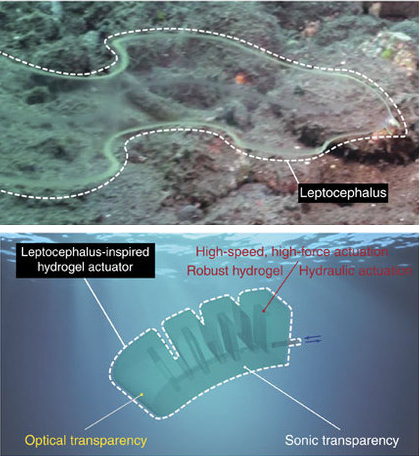
圖1鰻魚透明幼體(上圖)以及受柳葉鰻啟發制成的水凝膠致動器(下圖)示意圖。/?Yuk等人,2017
這些機器人通過液壓水凝膠致動器實現,而不是現有的滲透驅動型水凝膠致動器。由于響應時間和水凝膠致動力之間的固有耦合關系,后者受限于低致動力(毫牛頓)和低致動速度(響應時間為幾分鐘至幾小時)。而憑借精確設計的結構,液壓驅動型水凝膠允許機器人擁有更大的致動力(超過1牛)和致動速度。這些機器人還能夠在水中進行光學和聲學偽裝。
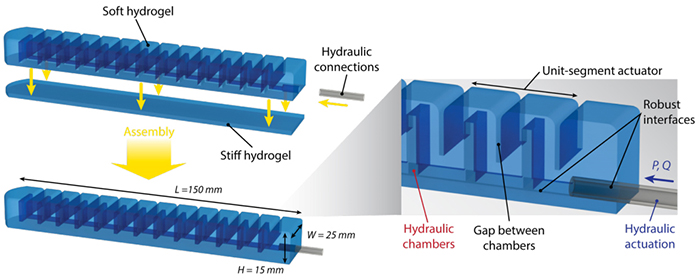
圖2柔軟彎曲致動器示意圖/?Yuk等人,2017
每個機器人都由柔性彎曲致動器組成。彎曲致動器的外形尺寸為25 x 150 x 15 mm,由7個單元段致動器串聯在一起。柔性水凝膠部件擁有液壓腔和液壓連接功能。而剛性水凝膠部件由不易伸長的元件制成,以在液壓致動下實現彎曲。與現有的滲透水凝膠致動器相比,這種宏觀水凝膠致動器具有非常快的運動速度。它可以在不到1秒鐘內實現20度的彎曲動作。
注:為了獲得最佳的視覺效果,研究人員把透明水凝膠染成了桃紅色。
水被泵入致動腔,為機器人提供源動力。請看下面的視頻,一根豎直的水凝膠致動器在1秒鐘內彎曲成一個完整的圓。隨著水被泵出,致動器又在1秒鐘內恢復到原來的形狀。而由相同水凝膠制成的滲透型水凝膠致動器執行相同彎曲運動所需要的時間則比上述時間長的多(幾個小時)。
注:為了獲得最佳的視覺效果,研究人員把透明水凝膠染成了桃紅色。
在實驗中,研究團隊制造了一種水凝膠機器魚,可以像真正的魚一樣游泳;以及一個手狀水凝膠夾持器,隨著水的泵入和泵出,夾持器可以實現抓取和釋放功能。
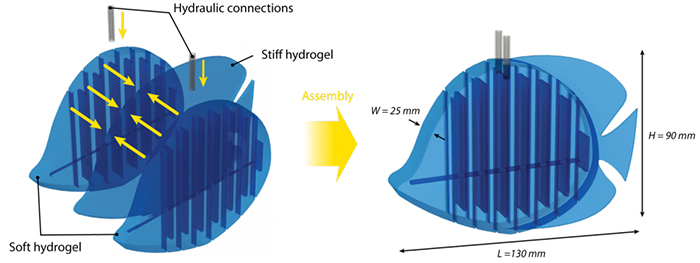
圖3水凝膠機器魚示意圖/?Yuk等人,2017
請看下面的視頻,一條水凝膠機器魚在彩虹背景下游泳時保持偽裝狀態。機器魚還能通過液壓驅動的敏捷尾部動作執行向前的魚類游動。兩個獨立的液壓部件控制魚的液壓動作(圖3)。
下圖中的偽裝水凝膠夾持器能夠快速彎曲,以捕捉、釋放活的金魚。由于其光學透明度,水凝膠夾持器在接近水槽中的金魚時可以保持偽裝狀態。水凝膠的敏捷動作使得夾持器能夠成功捕獲金魚,而其固有的柔軟度不會對捕獲、釋放的金魚帶來任何傷害。
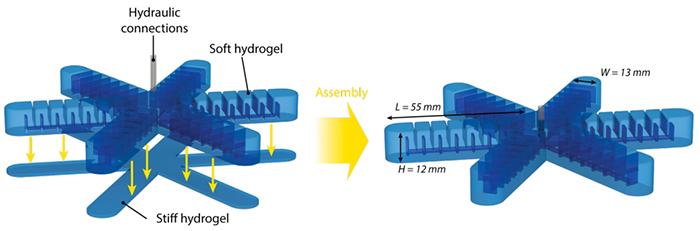
圖4水凝膠夾持器示意圖/?Yuk等人,2017
六個彎曲致動器由一個液壓輸入端同時致動,從而操作夾持器(圖4)。
水凝膠結構幾乎完全透明,因此在水下可以完全偽裝起來。它們的聲學和光學性質也與水幾乎相同。柔性致動器和機器人通常使用諸如Ecoflex和Elastosil這樣的有機硅彈性體。它們是可拉伸的,但具有光學不透明度,在可見光范圍內的透光率只有5%。然而,PAAm-藻酸鹽水凝膠在可見光范圍內擁有高得多的透射率,95%;其反射率(1.3365)也與水的反射率接近(1.333)。PAAm-藻酸鹽水凝膠也具有顯著的聲波特性。水凝膠結構內的聲速(1485.7 m/s)幾乎與純水相同(1447.5 m/s)。PAAm-藻酸鹽水凝膠的聲阻抗(z0 = 1.487×106Pa·s-1)與純水的聲阻抗(z0 = 1.448×106Pa·s-1)僅相差約1%。
光學和反射聲波特性通常用于水下環境中的感應應用場景。水凝膠的光學和聲學特性與水非常相似,這使得液壓水凝膠致動器成為偽裝設備的完美選擇。據研究人員介紹,這些基于水凝膠的致動器和機器人在生物醫學、可調光學、軟電子學和機器人學等領域擁有實際應用意義。
舉個例子,我們可以進一步改善水凝膠器件,將其用于治療用途,比如靶向給藥。由于水凝膠的光學和聲波透明度,這些器件也可用于實現實時高保真光學和超聲成像。

DevicePlus 編輯團隊
設備升級版適用于所有熱愛電子和機電一體化的人。
審核編輯黃宇
-
機器人
+關注
關注
213文章
29718瀏覽量
212774 -
致動器
+關注
關注
0文章
33瀏覽量
4240
發布評論請先 登錄
盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
水凝膠拉伸試驗機:材料性能的洞察者






 工商網監
工商網監
評論