 對齊C型氣動焊鉗上的圓形電極臂
對齊C型氣動焊鉗上的圓形電極臂
在對齊固定式電極臂后必須注意要重新計算 TCP 點。
在對齊前要注意焊鉗隨附資料中的報告和圖紙。
第 1 步:切斷機器人焊鉗電流,釋放壓力并排出氣動元件的氣體。
第 2 步:關閉冷卻水循環。
第 3 步:將帶焊鉗的機器人移至一個安全的維護位置。
或者分離機器人焊鉗與機器人,并將機器人焊鉗定位至適合進行維護工作的基架上。
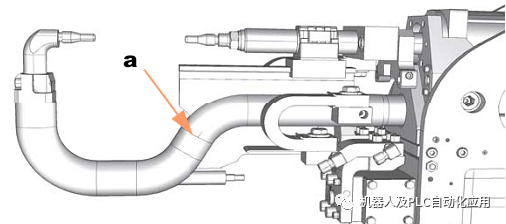
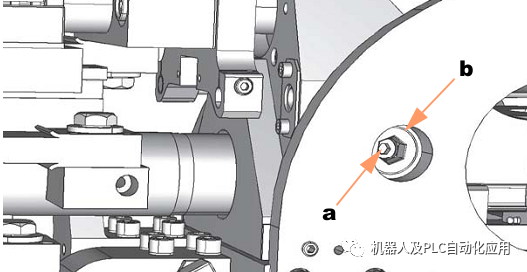
第 4 步:在帶圓形電極臂的 C 型焊鉗上對齊固定式電極臂 (a)。
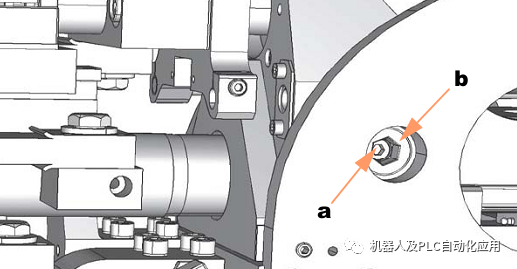
第 5 步:取下兩側的 M8 內固定螺栓 (a)。然后松開固定式電極臂兩側的夾緊螺栓 (b)。

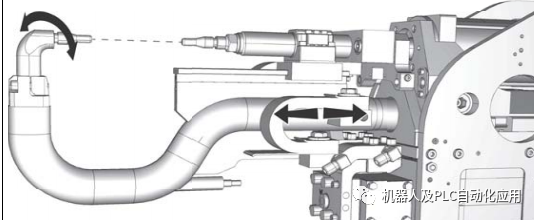
第 6 步:現在您可以小心地扭轉電極臂并縱向移動,進行對齊。
第 7 步:在夾緊電極臂前要檢查所有絕緣件,確保沒有損壞。
必須對齊絕緣套管槽,確保它在鉗體的安裝位置向下,以避免污物進入。
第 8 步:計算 TCP 點。為此要注意焊鉗隨附資料中的報告和圖紙。
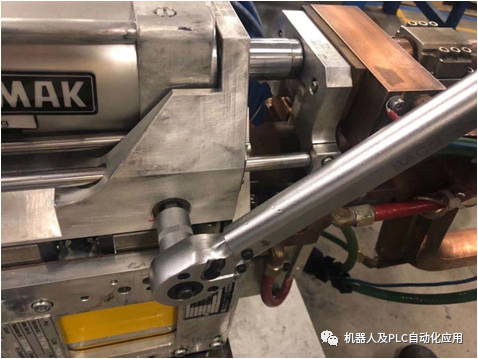
第 9 步:擰緊固定式電極臂兩側的夾緊螺栓 (b)。用固定螺栓 (a) 固定夾緊螺栓。
完成對齊
審核編輯 :李倩
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
212文章
29281瀏覽量
210927 -
電極
+關注
關注
5文章
835瀏覽量
27626 -
焊鉗
+關注
關注
0文章
16瀏覽量
1459
原文標題:對齊 C 型氣動焊鉗上的圓形電極臂
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何選擇氣動V型調節球閥廠家
如今互聯網的發展越來越成熟,特別是5G時代的到來,也讓我們倍感時代的進步,同時也有越來越多的客戶會在網上尋找產品,購買產品,特別是工業品,例如:現在有很多氣動V型調節球閥用戶想利用互聯網可以更
發表于 04-22 14:30
?864次閱讀
關于術中透視C型臂的介紹
術中透視C型臂—顧明思義就是外形酷似C型的機架,由產生X射線的球管,采集圖像的平板探測器以及圖像處理系統組成,主要功能除了能夠得到常規的
發表于 05-08 10:43
?6919次閱讀
術中透視C型臂是什么,有哪些作用
術中透視C型臂—顧明思義就是外形酷似C型的機架,由產生X射線的球管,采集圖像的平板探測器以及圖像處理系統組成,主要功能除了能夠得到常規的
發表于 06-17 11:18
?1.8w次閱讀
C語言中Linux字節對齊的問題
,于是經過排查,是因為傳遞消息的結構體沒有考慮字節對齊的問題。 隨手整理一下C語言中字節對齊的問題與大家一起分享。 一、概念 對齊跟數據在內存中的位置有關。如果一個變量的內存地址正好位

C語言 | 內存對齊01 - 什么是內存對齊
一、前言在單片機下使用C語言編程時,內存對齊的知識點必須掌握。掌握內存對齊后,可以防止內存碎片化,單片機有限的內存被更加有效地使用。二、內存對齊先看如下代碼:結構體Test1占用了多少
發表于 01-13 15:18
?0次下載

電伺服焊鉗的擺臂銑刀的SG_Background控制
通過后臺命令可以使固定焊鉗進行異步運動。此時機器人軸可獨立于焊鉗進行另外的運動。不僅在修磨時可進行異步的焊鉗運動,焊接時也同樣可以。但這僅適用于無實際工件的測試焊接(例如在檢查阻力時)。
對齊X型氣動焊鉗上的扁平電極臂及更換極臂.
第 3 步:將帶焊鉗的機器人移至一個安全的維護位置。或者分離機器人焊鉗與機器人,并將機器人焊鉗定位至適合進行維護工作的基架上。
機器人對齊電極臂前的執行步驟
位置 a 固定式電極臂 位置 b 移動式滑動電極 位置 c 驅動電機 位置 d 托架及支撐板,用于手動式快速更換離合器 位置 e 導電帶 位置 f 變壓器
發表于 09-01 10:32
?617次閱讀






 工商網監
工商網監
評論