 CVD 步進電機驅動器說明
CVD 步進電機驅動器說明
CVD 步進電機驅動器是 PKP 系列高扭矩步進電機的推薦驅動器,因為它能夠在整個速度范圍內降低振動并提高扭矩性能。最新更新包括增加 RS-485 通信和 MEXE02 軟件支持。
工程師應考慮同一制造商生產電機和驅動器的原因之一是制造商對這兩種產品的獨特了解,可用于提高性能。一個例子是 CVD 驅動器的電流補償控制。該功能將實際電機繞組數據與獨特的驅動算法相結合,以降低振動。

通過先進的微步控制實現最低的振動和噪音
顯著提高微步進時的位置精度
雙極配置的最高扭矩(4 根引線)
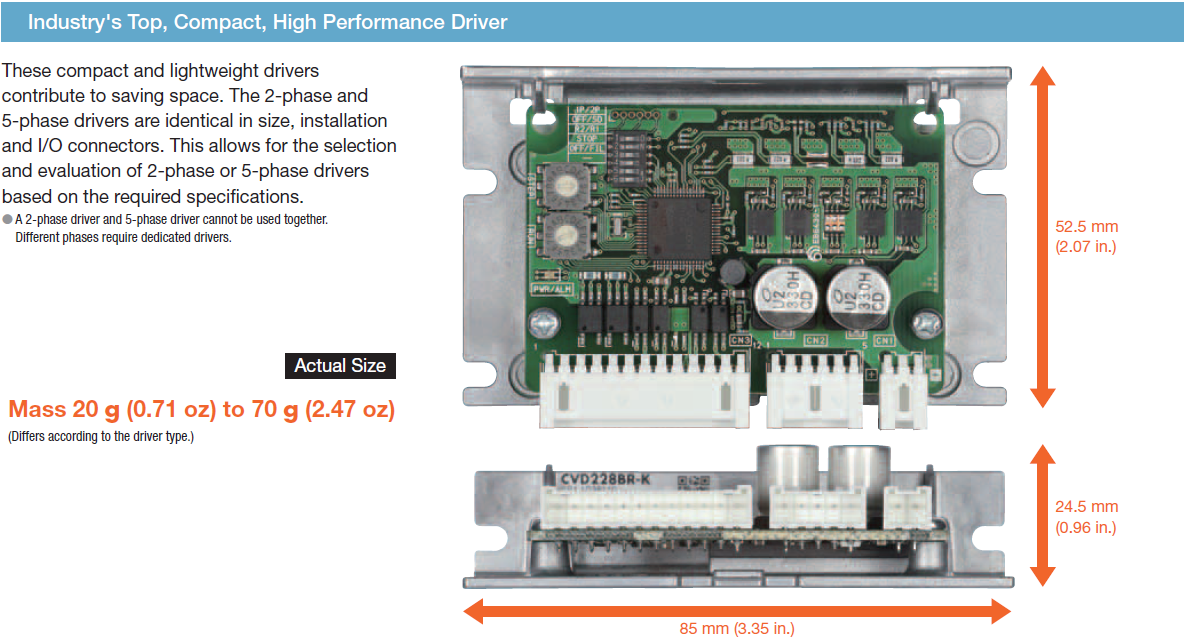
具有節省空間的 FET 的小型、薄型微步進驅動器
24 VDC 輸入 / 0.5A 至 4.5A
在第一部分,我將簡要解釋 CVK 系列的一些獨特優勢。在第二部分中,我將介紹四種主要類型的 CVD 驅動器以及每種類型提供的產品變體。
| 第一部分:簡介 |
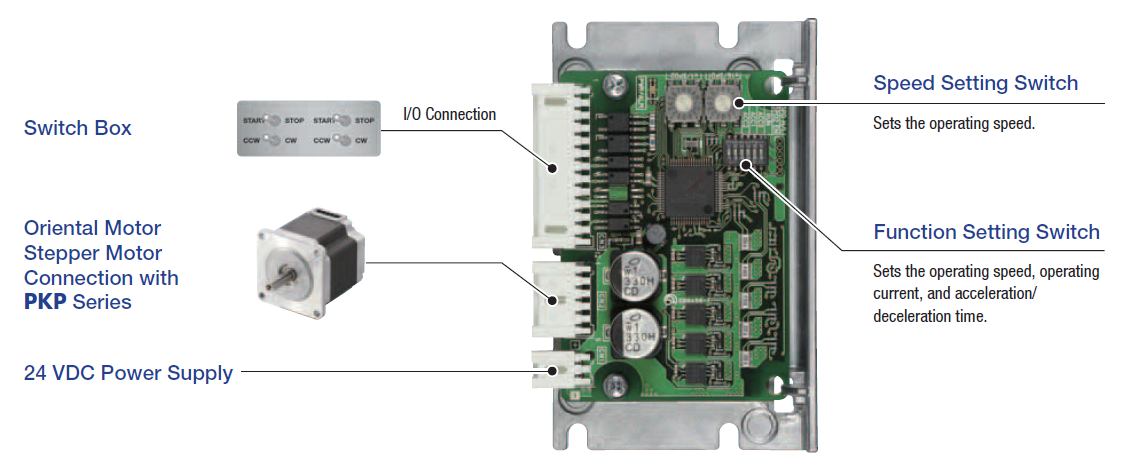
CVK 系列最初于 2014 年作為步進電機和雙極微步驅動器封裝型號推出,其中包括 PKP 系列步進電機和 CVD 驅動器。緊湊型板級 CVD 驅動器專為提高 PKP 系列步進電機的扭矩和精度而設計,同時最大限度地減少不同類型的振動并提高精度。CVD 驅動器還可以與其他 4 引線步進電機配合使用。
最低的振動性能
CVD 驅動器的與眾不同之處在于它們提供多種功能以最大限度地減少不同類型的振動。它對振動進行分類的方式是按速度范圍。在下面的速度-扭矩曲線中,您可以觀察 Y 軸上的振動水平(以電壓測量)和 X 軸上的速度范圍。黑線表示傳統步進電機和驅動器系統(如我們已停產的 CMK 系列或 CSK 系列步進電機和驅動器)的性能。綠線代表 PKP 系列步進電機和 CVD 驅動器的 性能。
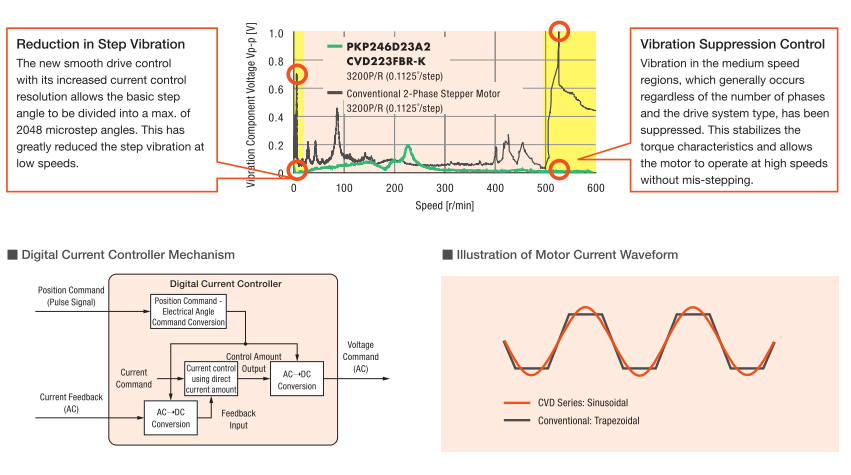
憑借 Oriental Motor 獨特的Smooth Drive算法,驅動器在整個速度范圍內以每整步 2048 步(2 相 1.8°;5 相 0.72°)自動微步。此功能的好處是控制器脈沖輸出分辨率可以保持在整步,而電機以平滑的微步性能運行。這是更新后的 Smooth Drive 功能(以前每整步只有 16 微步)。
Smooth Drive功能可有效減少 50 RPM 或以下時由步進運動引起的振動。 此外,電流相位校正可將共振頻率和轉矩脈動引起的 50~200 RPM 的振動降至最低。 此外,振動抑制控制可將反電動勢引起的 500 RPM 及以上的振動降至最低。
如上圖所示,CVD 驅動器還利用全時數字電流控制器來簡化電流設置并改進電流波形控制。在過去的驅動器設計中,一個電流檢測器用于電機的所有相位。在 CVD 驅動器中,每一相都有自己的電流檢測器。這提高了所有電機相位的電流均勻性。通過輸出均勻的正弦電流波形(正弦波驅動),與梯形波驅動相比,精度得到提高。
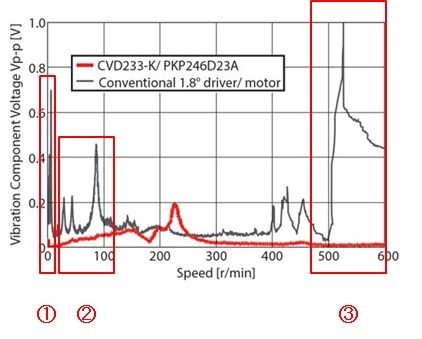
振動特性不變;即使改變了步進角。這是東方電機獨特的電流控制能力的結果。下圖顯示了步進電機表現出的 3 種類型的共振/振動,以及當所有振動抑制功能都處于活動狀態時它們降低了多少。
1. 低速在0~50 RPM之間發生振動(原因:步進運動)
2. 中速振動50~200 RPM(原因:共振和轉矩脈動)
3. 500 RPM及以上(原因:反電動勢)
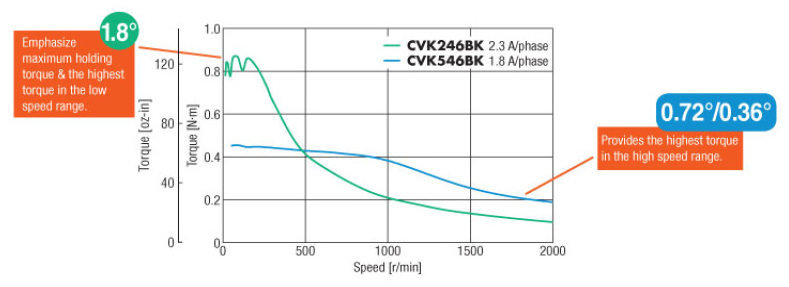
為了獲得更高的定位精度,尤其是微步進時,建議使用 5 相 0.72°/0.36° 步進電機。如果需要更高的精度,建議使用高分辨率型步進電機。
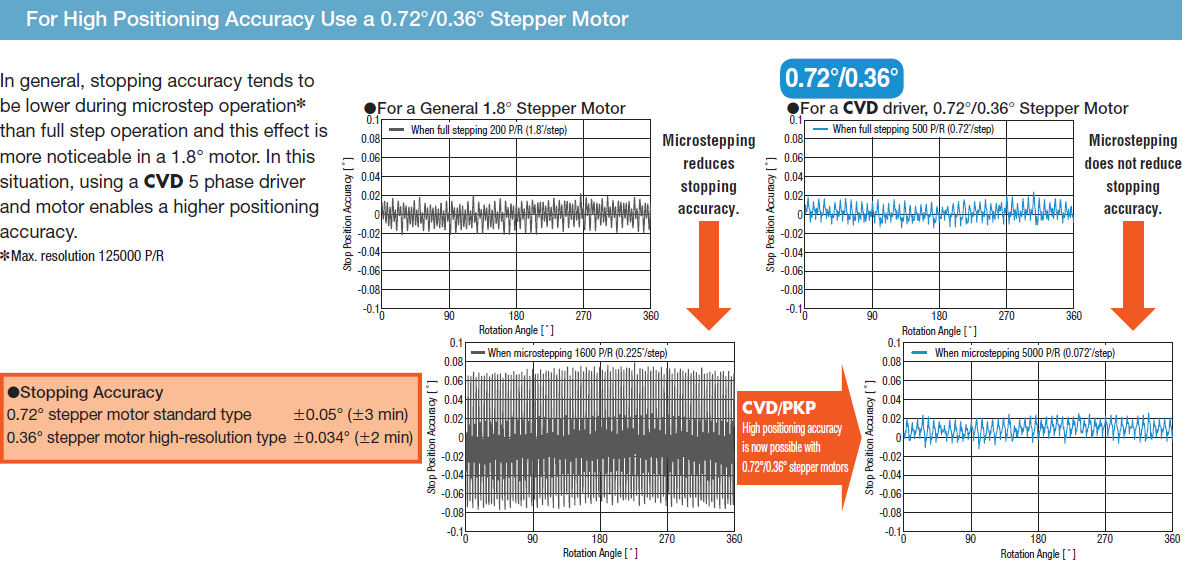
標準 1.8° 和 0.72° PKP 系列標準步進電機的停止精度規格為 +/-0.05°,高分辨率步進電機的停止精度規格為 +/-0.034°。高分辨率步進電機的高齒轉子實際上使電機更精確。
CVD 驅動器可用于 2 相和 5 相步進電機。2 相步進電機是最常見的,而 5 相步進電機專為要求低噪音和振動的應用而設計。對于相同的框架尺寸和堆疊長度,帶有 CVD 驅動器的 2 相步進電機將提供更多的低速扭矩,而帶有 CVD 驅動器的 5 相步進電機將提供更大的高速扭矩。
使用 CVD 驅動器,可以輕松地從 2 相升級到 5 相,因為驅動器尺寸相同。
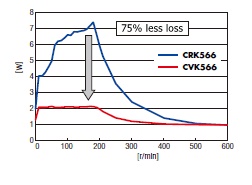
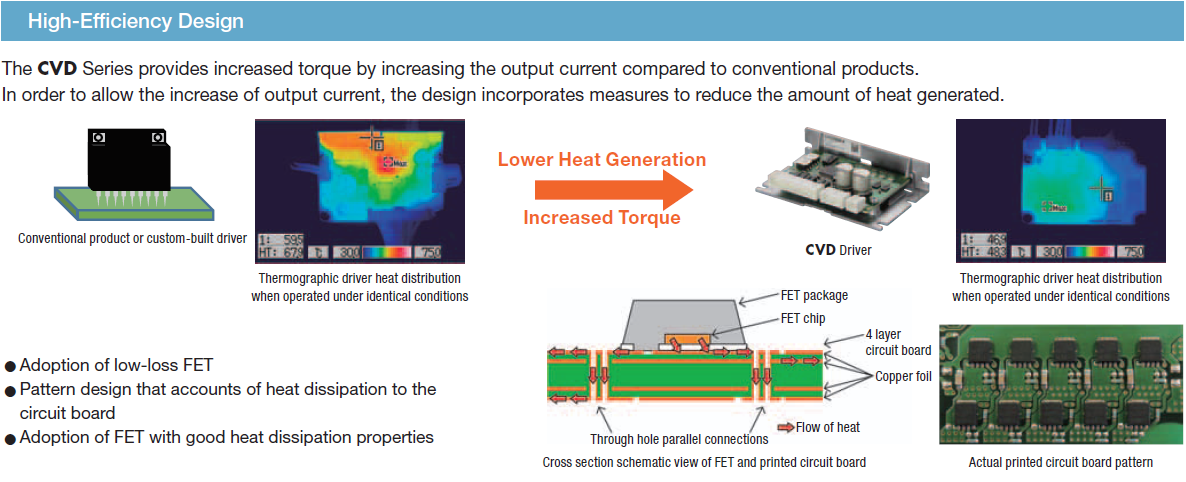
CVD 驅動器還提高了電源效率。最高功率效率出現在大約 175 RPM 時。在這一點上,功率損耗比過去的設計減少了 75%。
由于 CVD 驅動器的所有緊湊性、可用變體、平滑驅動、振動抑制功能以及它能夠參考電機數據這一事實,Oriental Motor 認為 CVD 驅動器是用于 PKP 系列步進電機的業界頂級性能驅動器。
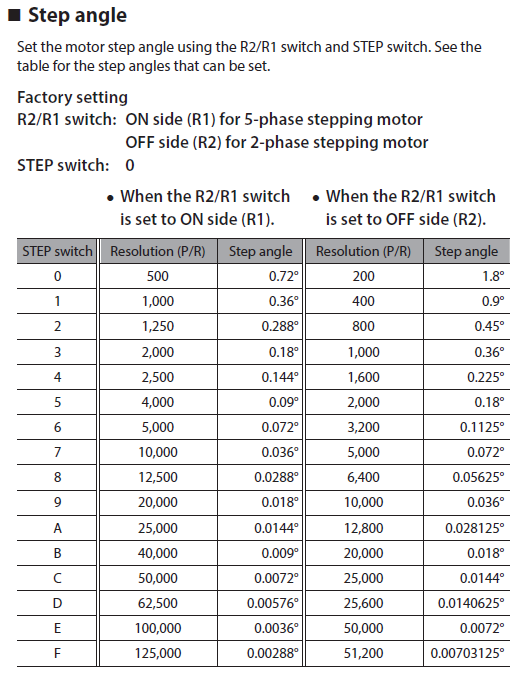
分辨率選擇
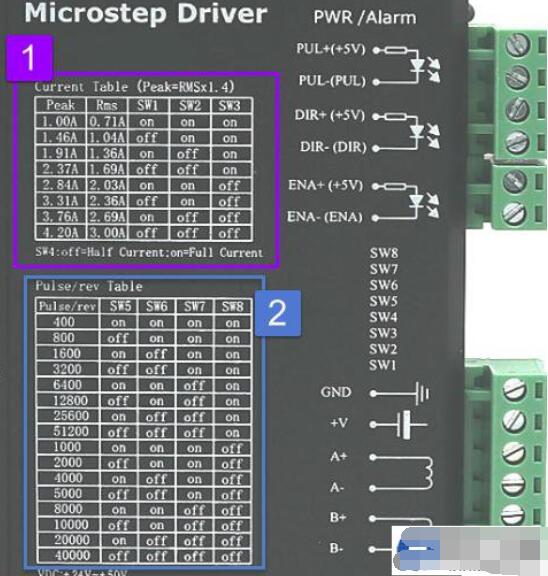
還有另一個 dip 開關可以從 32 個分辨率設置中進行選擇(16 個用于 2 相;16 個用于 5 相)。
散熱器是可選的
CVD 驅動器普遍存在的一個獨特優勢是散熱器是可選的。金屬安裝板實際上是為了安裝;不適用于散熱器。CVD 驅動器利用低損耗 FET 和優化的 PCB 走線以實現更好的散熱。我稍后會解釋更多。
| 第二部分:4 種 CVD 驅動器類型 + 產品變體 |
當我們最初發布 CVD 驅動器時,只提供一種類型的驅動器 - 脈沖輸入類型。多年來,我們擴大了產品范圍,總共包括四種類型和其中的各種變體。有關最新的 CVD 驅動程序系列,請參閱我們的網站。
脈沖輸入型
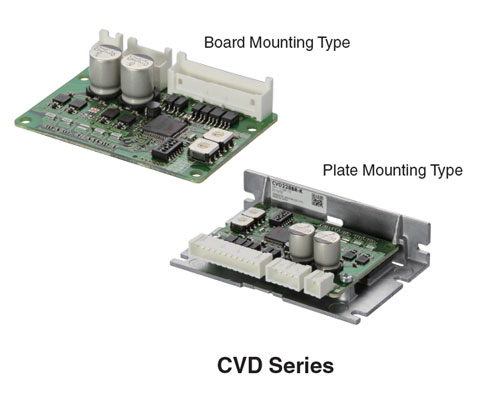
僅董事會
安裝板
直角
RS-485通訊類型
安裝板
SC型(速度控制型)
內置脈沖發生器
S型(基板安裝型)
I/O設定或SPI通訊
1. 脈沖輸入型
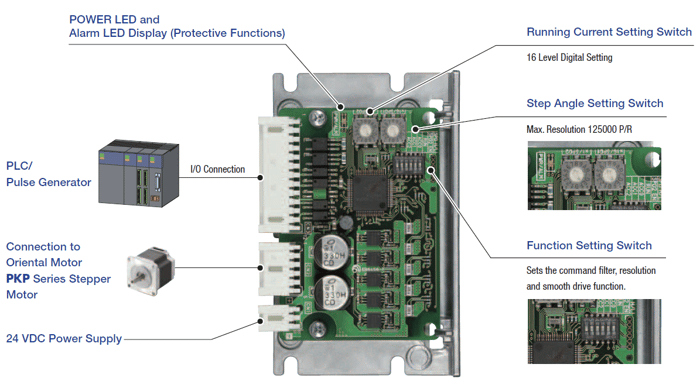
除了緊湊之外,CVD 脈沖輸入型驅動器是最傳統的步進電機驅動器類型。驅動器的 I/O 在 1 脈沖模式下包括“脈沖”和“方向”輸入指定,并且相同的輸入切換到 2 脈沖模式下的“CW”和“CCW”輸入指定。控制器通常連接到這些輸入并為電機提供命令信號。雖然脈沖數準確地控制電機運行多遠和多快,但脈沖頻率 (Hz) 控制其速度。
可選擇的步進角和微步濾波器控制
2 種安裝類型和連接器配置
警報器
24 VDC 輸入 / 0.5A 至 4.5A
CVD 脈沖輸入型驅動器有兩種變體:僅板和安裝板。這些變化更多地與安裝和安裝有關。脈沖輸入驅動器變體之間沒有關鍵的功能差異。
僅限董事會

這是直接通過 4 個螺栓孔安裝且不需要散熱器的脈沖輸入型驅動器的變體。使用高效組件(低損耗 FET)和更好的散熱特性(優化跟蹤)有助于實現這一目標。
安裝板

這個和板子之間有兩個區別。首先,明顯的區別是增加了安裝板,更容易安裝。其次,連接器現在是水平方向而不是垂直方向。
2、RS-485通訊方式
這是2021 年發布的最新型CVD 驅動器。與脈沖輸入型驅動器的關鍵功能差異如下所列。
內置存儲數據控制器
可存儲 256 個運動曲線
RS-485 通信 - 在 RS-485 網絡中最多可連接 31 個驅動器
MEXE02 軟件 - 使用 GUI 軟件更輕松地進行數據、參數設置
內置存儲數據功能 - 有助于簡化編程
更多I/O——滿足更多應用需求
主要更新包括明顯的RS-485 通信和與通用MEXE02 支持軟件的兼容性。
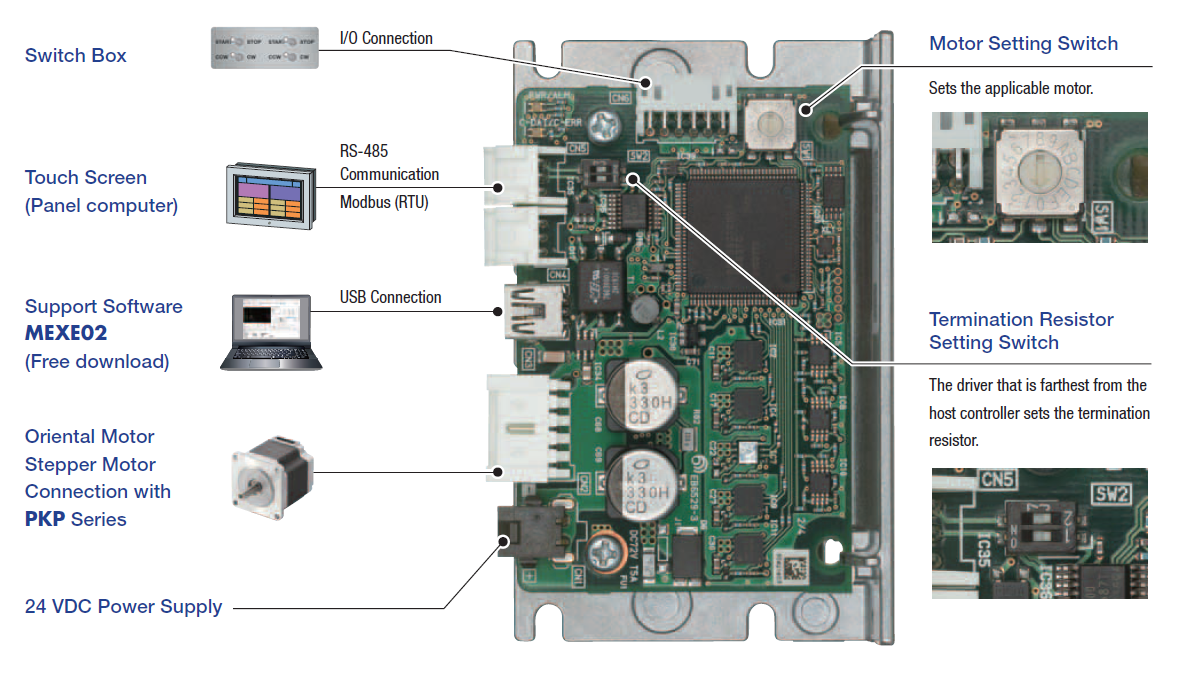
通過 RS-485 網絡,最多可以將 31 個驅動器連接在一起。布線被最小化,僅通信而不是 I/O,并且可以改進主機控制器和驅動器之間的通信。
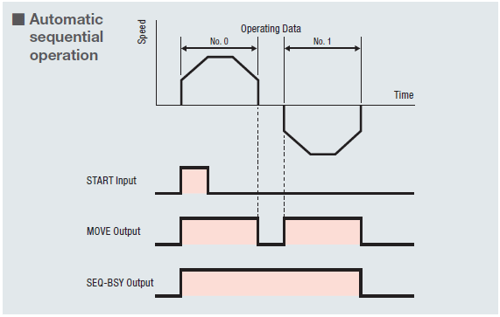
使用 MEXE02 軟件,就像按下簡單按鈕一樣。這意味著驅動程序現在包含一個內置控制器。這意味著不需要外部脈沖發生器。借助 Oriental Motor 的存儲數據操作,例如點動、連續、定位、自動順序操作及其 AREA 輸出,可以在幾分鐘內(如果您熟悉,則為幾秒)對高級運動序列進行編程。
例如,自動順序操作允許用戶僅通過一個 START 信號“鏈接”多達 256 個運動曲線序列。
RS-485 通信類型驅動程序滿足我們對 CVD 驅動程序的最新更新,該驅動程序改進了網絡連接和 GUI 軟件的操作。如果您有改進我們產品的建議,請在下方發表評論。
RS-485通信方式有兩種。請看下面。
安裝板

安裝板變體的電機、電源和 I/O 連接器垂直面向。
安裝板(直角)

安裝板(直角)版本的電機、電源和 I/O 連接器水平面對。
3.SC型
“SC Type”中的“SC”意為“速度控制”。這實際上是 CVD 系列驅動器的簡化版本,旨在在速度控制應用中運行步進電機。目前,SC 型驅動器僅適用于 5 相電機。
無需脈沖發生器
可以設置 2 種速度
緊湊型高扭矩步進電機
改進的停止位置重復性
即使在停止時也能保持扭矩
可以連續工作
*需要電機電纜(單獨出售)
該驅動程序專為一種或兩種速度操作而設計,因此它可能最適合只需要兩種存儲速度設置的應用。該驅動器的好處是降低了成本并最大限度地減少了占地面積。盡管可以連續運行,但步進電機產生的熱量在靠近可能受熱不利影響的材料(例如用于研究的生物樣品)時可能并不理想。

4.S型
S 型 CVD 驅動器與其他驅動器不同。S 型是最小的 CVD 驅動器,為設計自己的驅動器的工程師提供了捷徑。這些驅動器可以很容易地安裝在更大的板上以進行多軸控制。與其他 CVD 驅動器類似,I/O 引腳可以垂直或水平定向以適應不同的驅動器設計。
電流設定范圍:0.5A ~ 2.8A
32 個電機分辨率設置(16 個用于 2 相,16 個用于 5 相)
驅動電機所需的所有功能都配備在驅動器中
只需在主板上添加一個鋁電解電容器
基本性能與CVK系列相同
聯系銷售人員了解定價和交貨時間
由于該產品專為自行設計驅動板的高級用戶設計,因此不在網上銷售。建議在購買前與我們的技術支持工程師進行產品咨詢。
板裝型驅動模塊 - 水平安裝
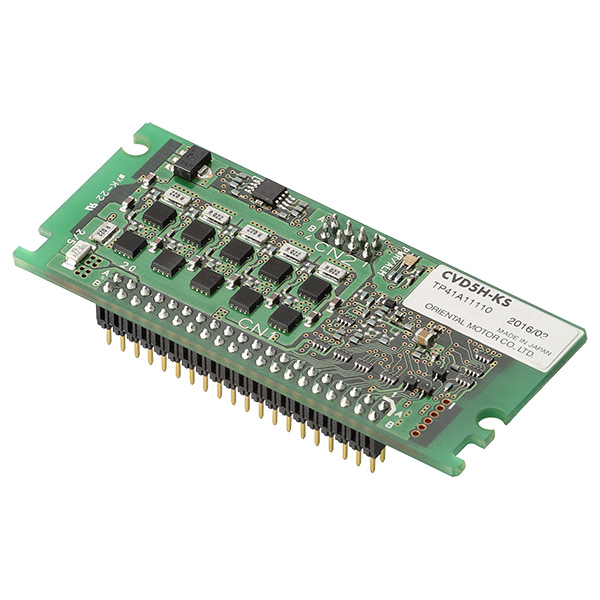
這種變化包括水平引腳,它們與電路板成直角。
板裝型驅動模塊 - 垂直安裝
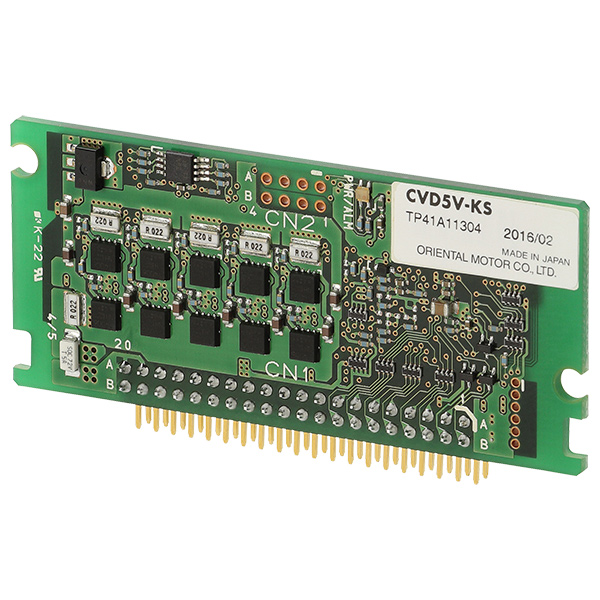
此變體包括垂直引腳,它們與電路板的方向相同。
下表描述了“H”和“V”驅動器變體的不同之處。
對于以上兩種產品變體,用戶還可以選擇I/O 設置或SPI 通信。I/O setting driver 是為單純想用I/O操作驅動的用戶準備的。SPI 通信驅動程序適用于希望使用板級通信來設置某些參數的用戶。
要了解有關 SPI 的更多信息,請訪問此處的維基百科鏈接。
如果您想了解有關 S 型驅動器的更多信息,請參閱此處的白皮書,了解其開發過程。
審核編輯黃宇
-
驅動器
+關注
關注
54文章
8643瀏覽量
149206 -
步進電機
+關注
關注
152文章
3161瀏覽量
149238 -
CVD
+關注
關注
1文章
76瀏覽量
10937
發布評論請先 登錄
步進驅動器說明書_步進電機驅動器怎么用_步進驅動器維修






 工商網監
工商網監
評論