 UWB室內定位系統維度分析
UWB室內定位系統維度分析

UWB室內定位系統維度分析
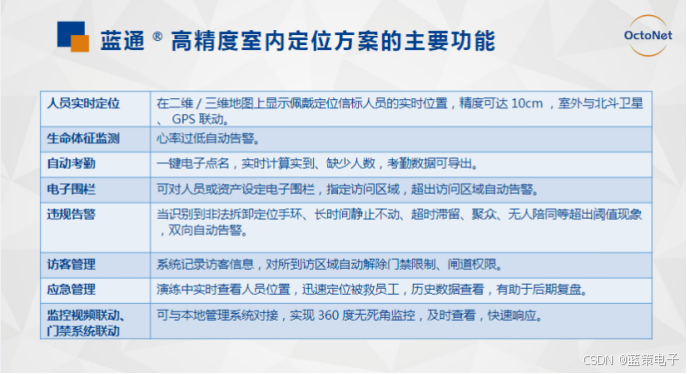
室內定位系統方案中,UWB室內定位技術目前應用較多,得益于UWB室內定位10-30厘米的超高定位精度。
目前根據使用場景的不同,UWB定位系統的定位維度分為以下4種:0維定位、一維定位、二維定位、三維定位,下面銥微云小編分別介紹下4種定位維度的特點和應用。
1、0維室內定位
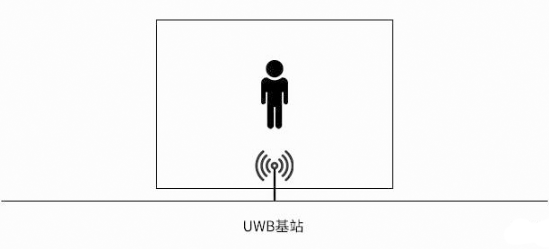
0維室內定位常用于存在性檢測,常見的應用場景是長時間監測人員是否在一個位置點或者一個范圍內。
0維室內定位系統硬件方面通常只需要一個增強基站和UWB標簽即可實現,UWB標簽和基站之間相互通信,再通過和后臺的交互實現人員的存在性監測、告警等功能。
2、一維定位
UWB室內定位系統的一維定位的典型應用場景是隧道、管廊等狹長定位區域的人員、物品、車輛定位,只需要定位目標在這個巷道的實時相對位置。由于寬度不大,在做狹長通道的情況下一般會忽略巷道的寬度。
一維定位中 ,通常需要兩個以上的定位基站按照線性路線來部署,當然也要考慮拐角,所以繪制路線的時候采用多段路線點,確保無死角覆蓋路線。
3、二維定位
UWB室內定位系統中的二維定位即是二維平面定位,需要確定在空間平面的X、Y坐標。此種定位一般分為以下兩種情況。
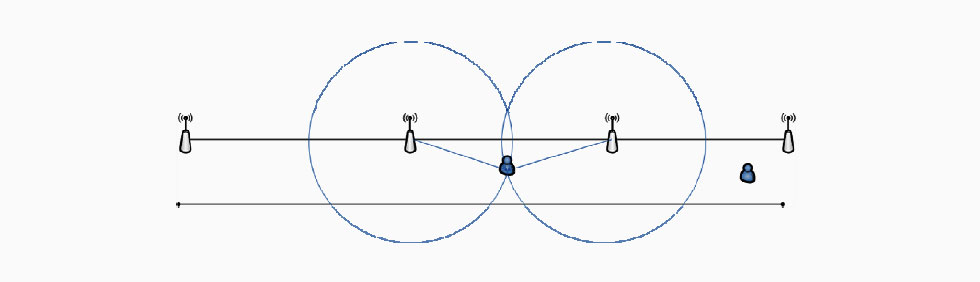
1)類似于道路的偽二維定位
和一維定位類似,但采用UWB測距的方式來實現目標定位功能。通過標簽離定位基站的距離,計算標簽的位置。由于定位場景的特殊性,可以計算出UWB標簽的位置。
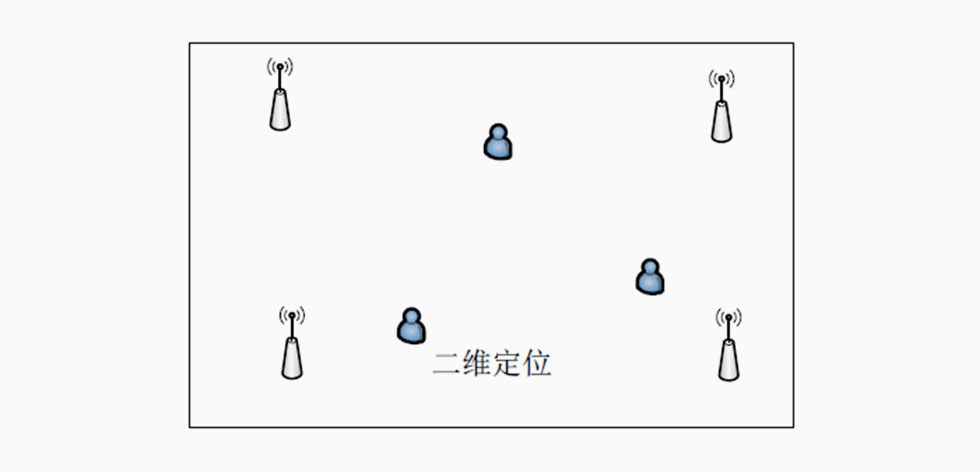
2)標準的二維定位
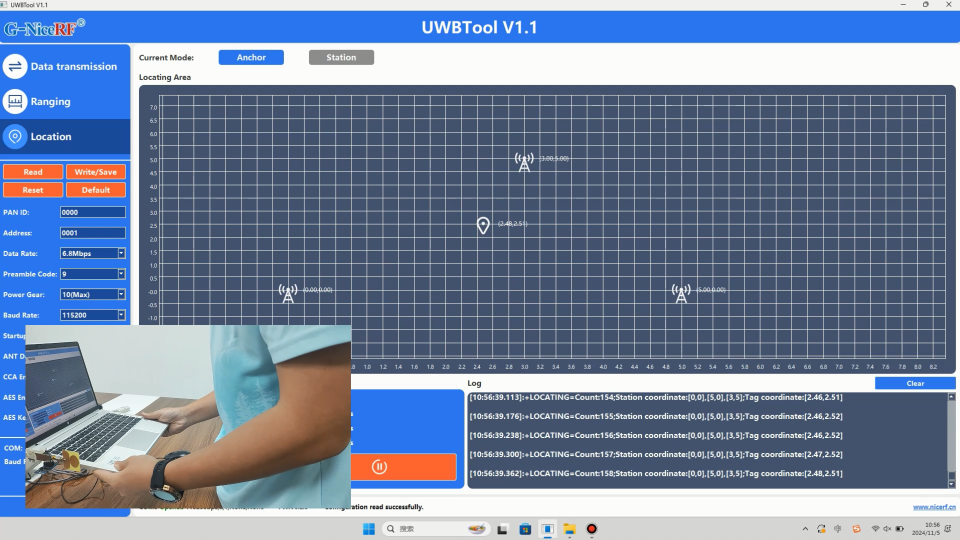
通過三個以上的定位基站,在一個標準的二維平面內確定UWB標簽的實時位置。可以測得UWB標簽的實時二維坐標。
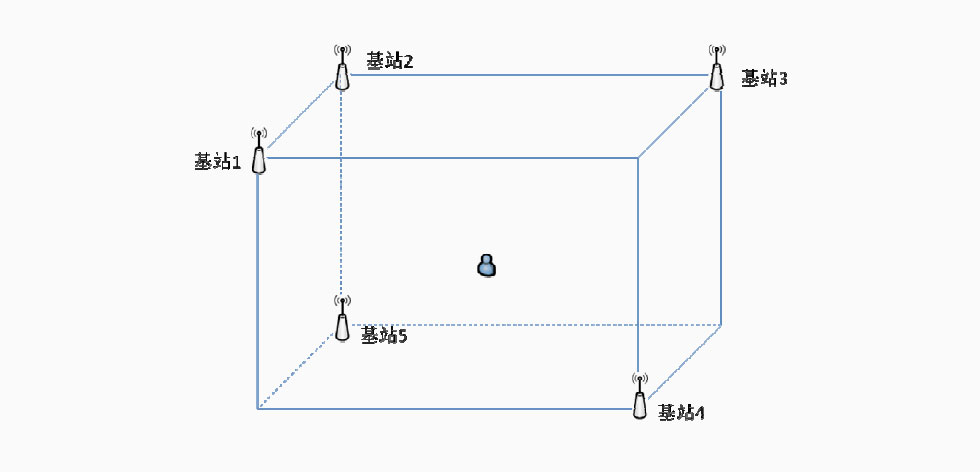
4、三維定位
使用UWB定位系統對目標做三維定位,需要求出被定位目標的XYZ三維坐標。
基站部署:在UWB基站架設的時候,需要特別拉開Z軸UWB基站的高度差,以確保在Z軸上的精確度。
本文由銥微云UWB室內定位系統小編整理發布。
審核編輯黃宇
-
UWB
+關注
關注
32文章
1185瀏覽量
62910 -
室內定位
+關注
關注
30文章
309瀏覽量
37161
發布評論請先 登錄
UWB - TDOA方案定位技術
UWB 定位測距
精準到厘米!安信可UWB定位模組,讓室內管理更“聰明”
低成本、高精度:巍泰技術UWB信標定位系統,為室內定位降本增效

智慧化工園區高精度室內定位解決方案
巍泰技術 UWB 信標系統定位技術與 GPS/RTK/RFID/WiFi 等技術優勢對比

如何應對UWB室內定位信號被遮擋

UWB標簽在室內定位中的優勢
UWB技術如何實現不同維度的定位需求
UWB+北斗RTK室內外融合定位

無線室內定位系統是通過什么技術實現的呢?

室內定位系統如何化解企業生產安全管理難度
如何利用LoRa實現室內定位?






 工商網監
工商網監
評論