") 電機(jī)驅(qū)動(dòng)芯片A4950及H橋電路分析
電機(jī)驅(qū)動(dòng)芯片A4950及H橋電路分析
全面解析電機(jī)驅(qū)動(dòng)芯片A4950及H橋電路,主要分為以下幾個(gè)方面:
一、H橋電路基礎(chǔ)知識(shí)
1.原理圖(以全NMOS管為例)

從上圖可看出,此電機(jī)驅(qū)動(dòng)電路由4個(gè)NMOS管構(gòu)成,形如H型,故名為H橋電路。通過(guò)控制4個(gè)MOS管的導(dǎo)通與截止達(dá)到對(duì)中間電機(jī)的不同控制效果。NMOS管的柵極為高電平時(shí)導(dǎo)通,低電平時(shí)截止。
2. H橋工作模式
正轉(zhuǎn)模式
當(dāng)Q1、Q4的柵極為高電平,Q2、Q3為低電平時(shí),Q1,Q4導(dǎo)通,如下圖所示,電機(jī)正向旋轉(zhuǎn)。

反轉(zhuǎn)模式
當(dāng)Q2、Q3的柵極為高電平,Q1、Q4為低電平時(shí),Q2,Q3導(dǎo)通,如下圖所示,電機(jī)反向旋轉(zhuǎn)。

3.補(bǔ)充
H橋中絕對(duì)不能出現(xiàn)同側(cè)(左側(cè)/右側(cè))的FET同時(shí)導(dǎo)通的情況,因?yàn)檫@樣會(huì)導(dǎo)致電流不經(jīng)過(guò)電機(jī)直接到地,(關(guān)注:電路一點(diǎn)通)形成短路!因此在狀態(tài)切換時(shí)需要一步一步來(lái),而集成H橋的芯片一般會(huì)在內(nèi)部自動(dòng)解決這個(gè)問(wèn)題(利用死區(qū)控制),如下圖所示:在正轉(zhuǎn)和制動(dòng)之間切換時(shí),會(huì)有一個(gè)過(guò)渡狀態(tài)(OFF)。

★此處還需補(bǔ)充一個(gè)知識(shí):MOS管的高端與低端驅(qū)動(dòng)。簡(jiǎn)單來(lái)說(shuō),高端驅(qū)動(dòng)即MOS管在負(fù)載的高電位一端;相反低端驅(qū)動(dòng)即MOS管在負(fù)載的低電位一端。如下圖所示:Q1、Q3為高端驅(qū)動(dòng),Q2、Q4為低端驅(qū)動(dòng)。在H橋中也常常被稱(chēng)為上臂和下臂。
此外,如果對(duì)MOS管原理有所了解,則可看出,打開(kāi)高端NMOS所需的柵極電壓會(huì)比打開(kāi)低端NMOS所需的柵極電壓大很多(要高于驅(qū)動(dòng)電源電壓)。(因?yàn)殚_(kāi)啟需要條件Vgs>Vth,而高端MOS導(dǎo)通后的源極電位較高,幾乎接近電源電壓,此時(shí)如果柵極電壓仍為電源電壓,則又關(guān)斷)
驅(qū)動(dòng)電壓越大,轉(zhuǎn)速越快;電流越大,扭矩越大;
當(dāng)扭矩<負(fù)載時(shí),電機(jī)轉(zhuǎn)速會(huì)下降,電流上升從而增大扭矩。當(dāng)負(fù)載非常大,電機(jī)帶不動(dòng)從而停止轉(zhuǎn)動(dòng)時(shí)(堵轉(zhuǎn)),電流達(dá)到最大值,此時(shí)需特別注意,很有可能燒壞電機(jī)驅(qū)動(dòng)。
二、什么是A4950
A4950是美國(guó)埃戈羅公司生產(chǎn)的一款單H橋電機(jī)驅(qū)動(dòng)芯片。因此網(wǎng)上賣(mài)的模塊多是使用兩塊芯片以達(dá)到可以控制兩個(gè)直流電機(jī)的能力。
提供輸入端子用于利用外部施加的PWM控制信號(hào)控制DC電機(jī)的速度和方向。提供內(nèi)部同步整流控制電路以在PWM操作期間降低功耗。
電機(jī)驅(qū)動(dòng)電壓:8~40V,輸出最大電流可達(dá)3.5A
推薦驅(qū)動(dòng)頻率:500Hz~30KHz
內(nèi)置過(guò)溫保護(hù),短路保護(hù)和可選擇的過(guò)流保護(hù)
三、A4950引腳封裝與功能框圖
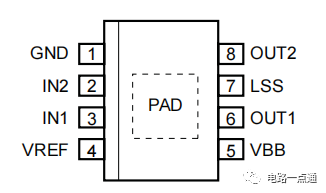
圖 3 A4950引腳封裝
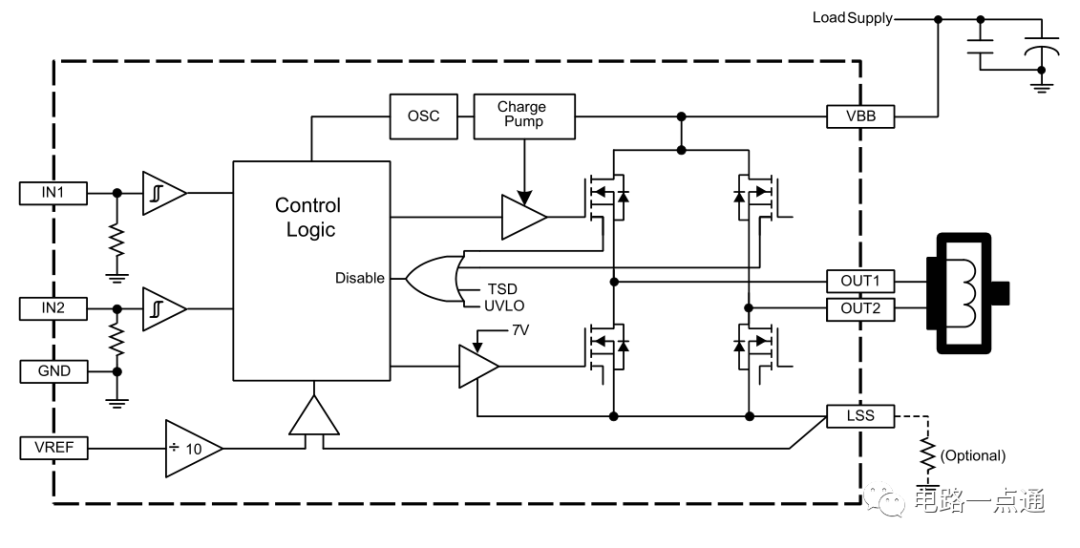
圖 4 A4950功能框圖 通過(guò)引腳說(shuō)明和功能框圖可看出,此芯片不同之處有:
只有單H橋,因此引腳較少;
限流比較的參考電壓由外部給出(VREF腳);因此限流值Isense=Vref/10/Rsense。如上面的模塊中,Vref接5V,Rsense為R250精密檢測(cè)電阻(0.25Ω),因此限流值為2A。
當(dāng)IN1和IN2均保持低電平1ms,芯片進(jìn)入待機(jī)模式。而不是通過(guò)引腳直接控制。
四、A4950驅(qū)動(dòng)電路使用說(shuō)明

圖 6 A4950驅(qū)動(dòng)電路 驅(qū)動(dòng)電路接口說(shuō)明:
1.VM:驅(qū)動(dòng)模塊的電源,根據(jù)電機(jī)的參數(shù)輸入,實(shí)測(cè)范圍8~40V;
2.VCC:接5V輸入,不能輸入3.3V,不然會(huì)影響性能;
3.GND:接地引腳 控制示例(在以上的3個(gè)引腳都接好的情況下):
任務(wù)1:A電機(jī)正轉(zhuǎn),占空比50%
方案:電機(jī)A的2個(gè)線分別接AOUT1、AOUT2。AIN1接高電平,AIN2接50%的PWM
任務(wù)2:B電機(jī)反轉(zhuǎn),占空比20%
方案:電機(jī)B的2個(gè)線分別接BOUT1、BOUT2。BIN1接20%的PWM,BIN2接高電平
五、A4950邏輯控制
表為最基礎(chǔ)邏輯控制表:

此表可對(duì)直流電機(jī)進(jìn)行簡(jiǎn)單的驅(qū)動(dòng)與制動(dòng)(此時(shí)電機(jī)工作于全速狀態(tài),無(wú)速度控制)。
把xIN1和xIN2分別接到單片機(jī)I/O口,xOUT1和xOUT2接到直流電機(jī)兩端。 當(dāng)控制xIN1為1,xIN2為0時(shí),電機(jī)便正轉(zhuǎn)。
再進(jìn)一步便可借助PWM對(duì)電機(jī)轉(zhuǎn)速進(jìn)行控制,如下表所示:

以xIN1為PWM,xIN2為0為例,電機(jī)在正向轉(zhuǎn)動(dòng)模式與快衰減模式之間不斷切換。
波形圖類(lèi)似如下:前面提到,電壓的大小決定直流電機(jī)轉(zhuǎn)速。從第三個(gè)圖V12=Vout1-Vout2可看出,加在電機(jī)兩端的電壓變化隨著PWM變化,則其平均值Vave=D*Vcc(D為PWM占空比,VCC為驅(qū)動(dòng)電壓)也隨著占空比的增大而增大,從而速度也相應(yīng)增加;反之則降低。 PWM的頻率一般選在5k~20kHz。

把上表歸納總結(jié)一下:
1.當(dāng)xIN中有一個(gè)恒為低電平,另一個(gè)為PWM時(shí):采取正反轉(zhuǎn)與滑動(dòng)/快衰減,占空比越大,轉(zhuǎn)速越快。
2.當(dāng)xIN中有一個(gè)恒為高電平,另一個(gè)為PWM時(shí):采取正反轉(zhuǎn)與制動(dòng)/慢衰減,占空比越小,轉(zhuǎn)速越快。
六、總結(jié)
1.可通過(guò)兩個(gè)H橋輸出的并聯(lián)控制一個(gè)直流電機(jī),這樣最大驅(qū)動(dòng)電流可翻倍,這在芯片的數(shù)據(jù)手冊(cè)中均有說(shuō)明;
2.和A4950的體積小,外接元件少,使用簡(jiǎn)單;
3.A4950雖然價(jià)格稍貴且需兩塊芯片才能實(shí)現(xiàn)雙H橋;
4.選擇集成H橋芯片時(shí),需要考慮的參數(shù)有:可承受的工作電流要大于電機(jī)的堵轉(zhuǎn)電流,防止堵轉(zhuǎn)時(shí)驅(qū)動(dòng)芯片燒毀;導(dǎo)通電阻盡可能小,減少芯片的發(fā)熱損耗;
5.A4950所能驅(qū)動(dòng)的電流最大也就3.5A。對(duì)于一些堵轉(zhuǎn)電流十幾安的電機(jī)來(lái)說(shuō)是遠(yuǎn)遠(yuǎn)不夠的。此時(shí)常常采取電橋驅(qū)動(dòng)+MOS管的方式自行搭建H橋。
審核編輯:湯梓紅
-
電路分析
+關(guān)注
關(guān)注
62文章
522瀏覽量
99372 -
電機(jī)驅(qū)動(dòng)
+關(guān)注
關(guān)注
60文章
1298瀏覽量
87586 -
驅(qū)動(dòng)芯片
+關(guān)注
關(guān)注
13文章
1389瀏覽量
56092 -
H橋電路
+關(guān)注
關(guān)注
0文章
27瀏覽量
6066 -
NMOS管
+關(guān)注
關(guān)注
2文章
123瀏覽量
5904
原文標(biāo)題:電機(jī)驅(qū)動(dòng)芯片A4950及H橋電路分析
文章出處:【微信號(hào):電路一點(diǎn)通,微信公眾號(hào):電路一點(diǎn)通】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
A4950全橋DMOS-PWM電機(jī)驅(qū)動(dòng)器解析
完全替代TI的DRV8870和ALLEGRO的A4950,性能優(yōu)越的國(guó)產(chǎn)[直流有刷電機(jī)&步進(jìn)電機(jī)]驅(qū)動(dòng)芯片AS4950
一種Arduino A4950驅(qū)動(dòng)直流電機(jī) 相關(guān)資料推薦
DRV8833、TB6612、A4950、L298N的詳解與比較
L9110H電機(jī)驅(qū)動(dòng)模塊
A4950全橋DMOS PWM電機(jī)驅(qū)動(dòng)器數(shù)據(jù)手冊(cè)
【電機(jī)驅(qū)動(dòng)芯片(H橋、直流電機(jī)驅(qū)動(dòng)方式)——DRV8833、TB6612、A4950、L298N的詳解與比較】

AS4950全橋(H橋)直流有刷電機(jī)驅(qū)動(dòng) 2相4線步進(jìn)電機(jī)驅(qū)動(dòng) 替代L298N【附開(kāi)源設(shè)計(jì)資料】
H橋電機(jī)驅(qū)動(dòng)電路設(shè)計(jì)與解析
A4950閉環(huán)驅(qū)動(dòng)直流減速電機(jī)(Arduino)
基于STM32的PWM電機(jī)驅(qū)動(dòng)TB6612、A4950
CS9022完美兼容替代DRV8870/A4950/A4953/TB67H451電機(jī)驅(qū)動(dòng)芯片,驅(qū)動(dòng)電流高達(dá)3.8A方案

IU9028寬工作電壓,6A持續(xù)電流H橋電機(jī)驅(qū)動(dòng)芯片,兼容DRV8870和A4950






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論