 VW機器人關于RIP的程序設置方法
VW機器人關于RIP的程序設置方法
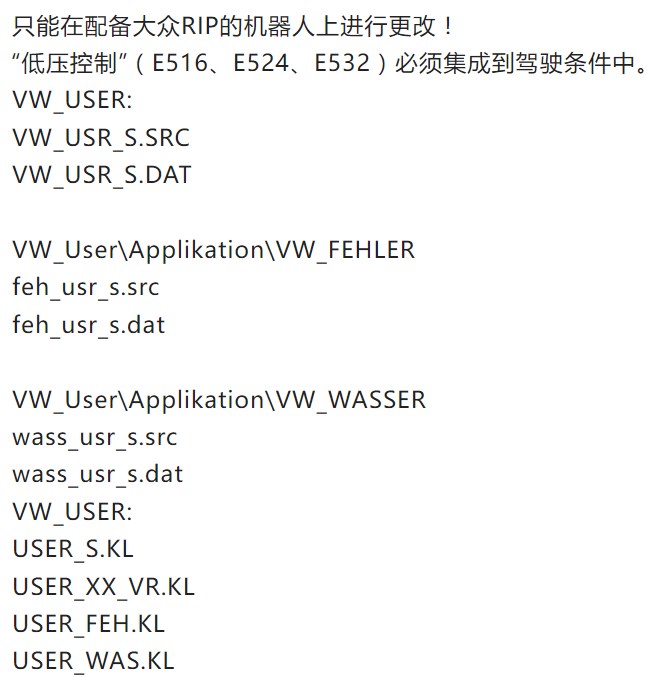
機器人RIP
范圍:K1 - A/E513——520
A513 開水閥
A514 先導閥
A515 水閥關
A518 切絲閥動作
A520 清洗噴嘴
K2 - A/E521——528
K3 - A/E529——536
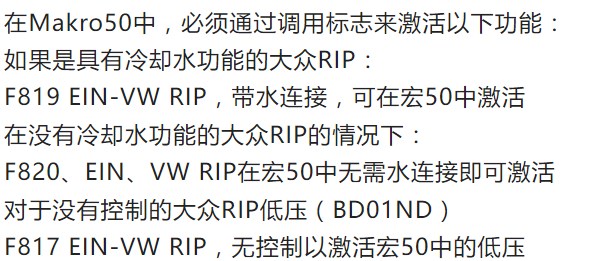
變量:F819:用來控制發出A25 機器人水流量正常
IF NOT MIT_VW_WASS AND ($FLAG[F_O_WASSER] OR OHNE_VW_WAS) AND NOT $FLAG[F_KWY01EIN] THEN 不帶水,有F820 或者 OHNE_VW_WAS ,沒有F819 水閥啟動
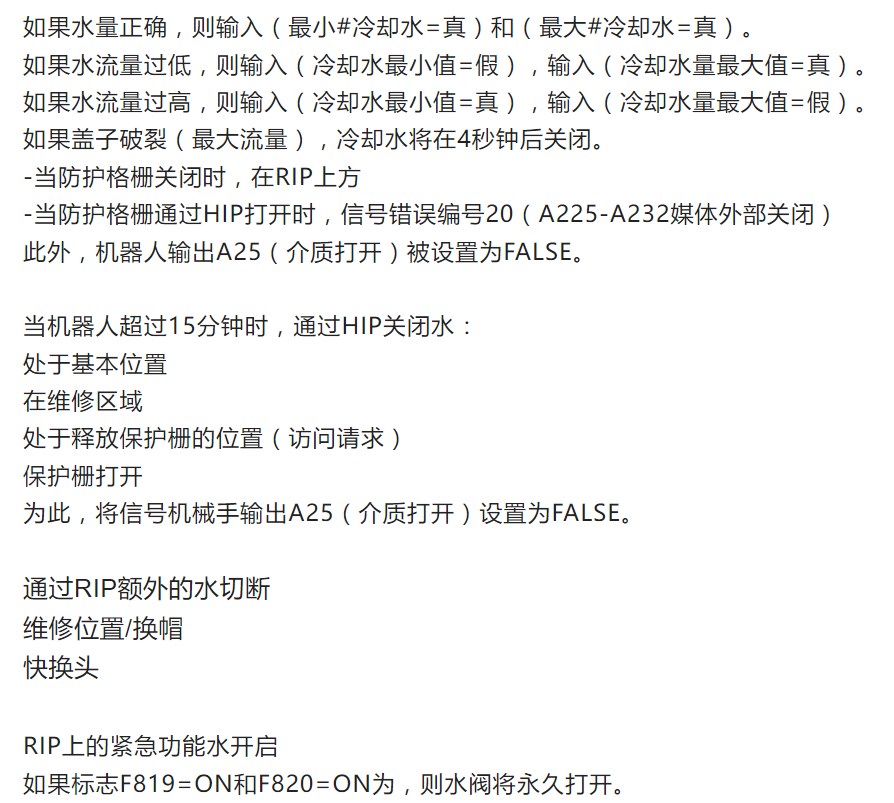
IF NOT $IN[I_BD01ND] OR (NOT $IN[I_BD02ND] AND $FLAG[F_MIT_RIP2]) OR (NOT $IN[I_BD03ND] AND $FLAG[F_MIT_RIP3]) THEN 沒有低壓
$OUT[O_R_Med_ein]= FALSE 沒有A25
ELSE
$OUT[O_R_Med_ein]= TRUE 有低壓就有A25
ENDIF
IF ($OUT[O_R_PFO] AND $OUT[O_R_SAK]) THEN
OHNE_VW_WAS=FALSE
ELSE
OHNE_VW_WAS=TRUE
ENDIF
ENDIF
$FLAG[F_O_WASSER] :F820 不帶水
MIT_VW_WASS:帶水控制單元
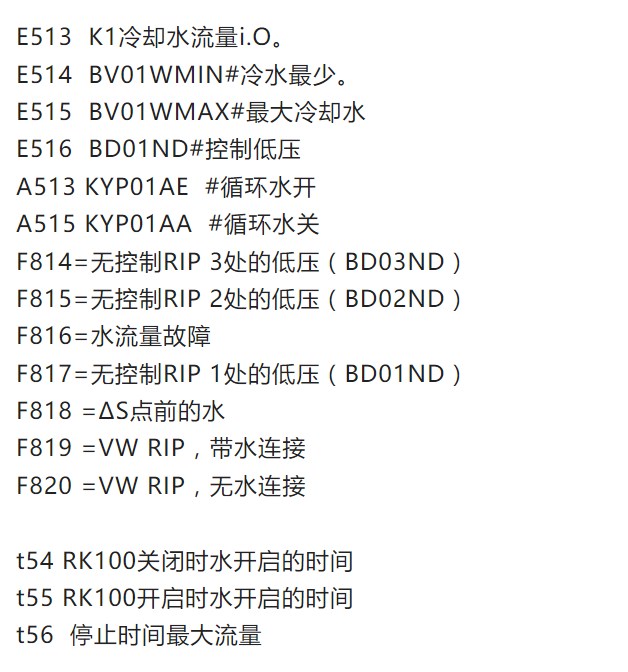
$IN[I_BD01ND]:E516 有控制低壓
$IN[I_BD02ND]:E524 有控制低壓
$FLAG[F_MIT_RIP2]:F142 帶第2個RIP
$OUT[O_R_PFO]:A15原位
$OUT[O_R_SAK]:A16在軌跡上
* 在不需要水的機器人沒有使用F819而是使用F820,當E516壓力滿足時發出A25
/////////////
當使用 F819時 MIT_VW_WASS(水控制單元)將被激活, 控制A513 開水,或A515關水。
IF $OUT[O_R_RK100] AND NOT WASSERSTOE AND NOT WASSER_EIN AND NOT $FLAG[281] AND NOT $FLAG[283] THEN
開水條件1:A10機器人啟動,沒有水流量故障,水還沒啟動,沒有F281和F283(關水F量)
或者F819和F820都有,沒有水故障也可開水。
F820 不帶水控制單元
WASSER_EIN: 水啟動
SWITCH WA_ZUSTAND
CASE 1 開水
;Wasser EIN
$OUT[O_KYP01WA]=FALSE
$OUT[O_KYP01WE]=TRUE
$OUT[O_KYP02WA]=FALSE
$OUT[O_KYP02WE]=TRUE
$OUT[O_KYP03WA]=FALSE
$OUT[O_KYP03WE]=TRUE
WASSER_EIN=TRUE
;$TIMER_STOP[T_WASSER_EIN]=FALSE
CASE 2 關水
;Wasser AUS
$OUT[O_KYP01WA]=TRUE
$OUT[O_KYP01WE]=FALSE
$OUT[O_KYP02WA]=TRUE
$OUT[O_KYP02WE]=FALSE
$OUT[O_KYP03WA]=TRUE
$OUT[O_KYP03WE]=FALSE
WASSER_EIN=FALSE
WASSERSTOE:水故障
IF ($IN[I_BV01WMIN] AND NOT $IN[I_BV01WMAX]) OR ($IN[I_BV02WMIN] AND NOT $IN[I_BV02WMAX]) OR ($IN[I_BV03WMIN] AND NOT $IN[I_BV03WMAX]) THEN
;Auswertung Fehler maximaler Fluss in welcher RIP
W_MAX_RIP1=$IN[I_BV01WMIN] AND NOT $IN[I_BV01WMAX]
W_MAX_RIP2=$IN[I_BV02WMIN] AND NOT $IN[I_BV02WMAX]
W_MAX_RIP3=$IN[I_BV03WMIN] AND NOT $IN[I_BV03WMAX]
$TIMER_STOP[T_WASSER_STO]=FALSE
水壓檢測不能沒有高壓水路。
IF ($TIMER[T_WASSER_STO]>WA_STOER_Z) THEN 水故障超時T25〉4000
WASSERSTOE=TRUE
$FLAG[F_T_WA_WSTOE]=TRUE 水故障
$TIMER_STOP[T_WASSER_STO]=TRUE
$OUT[O_KYP01WA]=TRUE 關閉水
$OUT[O_KYP01WE]=FALSE
$OUT[O_KYP02WA]=TRUE
$OUT[O_KYP02WE]=FALSE
$OUT[O_KYP03WA]=TRUE
$OUT[O_KYP03WE]=FALSE
審核編輯:劉清
-
機器人
+關注
關注
212文章
29218瀏覽量
210745 -
RIP
+關注
關注
0文章
31瀏覽量
10822
原文標題:VW機器人關于RIP的程序設置
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論