 使用C2000內部比較器替外部比較器
使用C2000內部比較器替外部比較器

使用C2000內部比較器替外部比較器
C2000系列芯片在數字電源和電機控制中有著廣泛的應用,在這些應用中,過流過壓保護是必不可少的。傳統的方法是使用外部比較器,但是會存在濾波電路不好設計,不同版本需要不同的BOM來提供不同的保護點等問題。本文針對所有第三代C2000芯片,比如F2807x/37x,F28004x,F28002x等,介紹C2000內部比較器的具體實踐方法,并提供了與傳統的外部比較器方法的比較,結果表明,使用C2000內部比較器的方法在效率和成本上都具備明顯的優勢。
1. 介紹
C2000系列芯片在數字電源和電機控制中有著廣泛的應用,在這些應用中,過流過壓保護是必不可少的。傳統的方法是使用外部比較器,但是會存在濾波電路不好設計,不同版本需要不同的BOM來提供不同的保護點等問題。本文針對所有第三代C2000芯片,比如F2807x/37x,F28004x,F28002x等,介紹C2000內部比較器的具體實踐方法,并提供了與傳統的外部比較器方法的比較,結果表明,使用C2000內部比較器的方法在效率和成本上都具備明顯的優勢。
2. C2000 內部比較器的介紹
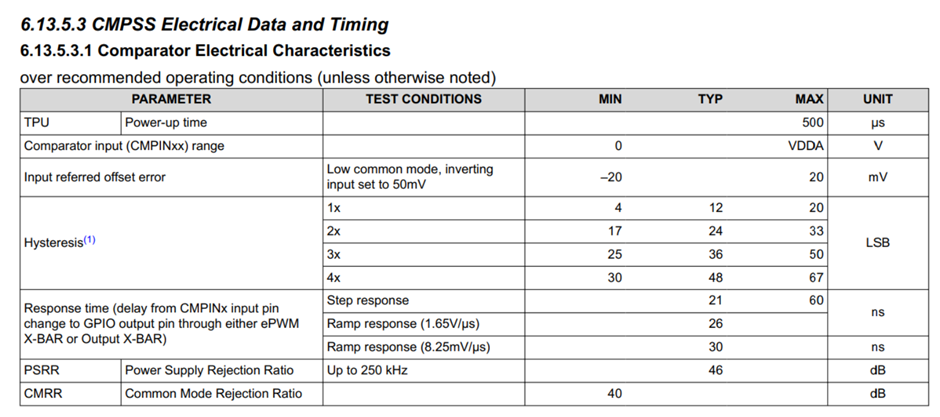
TI 第三代C2000芯片全系列集成了帶DAC的片內比較器,通過DAC設定閾值,與采樣信號分別送到片內比較器的正負輸入端做比較,由于DAC的集成,用戶可以方便地修改比較的電壓值。同時,C2000比較器內部集成數字濾波器,可以實現高性能的濾波。生成保護信號給到PWM模塊封鎖PWM輸出,從而實現快速的過流過壓保護,無需額外再加比較器和基準電壓。另外,C2000內部的比較器響應速度快,以F280049 為例(可參考datasheet上Comparator Electrical Characteristics這一章節),從比較器輸入的電平異常到比較器產生輸出信號,延遲最多60ns, 而通用比較器的延遲一般要1us左右,使用與C2000內部比較器相似規格的比較器成本又會比較高。
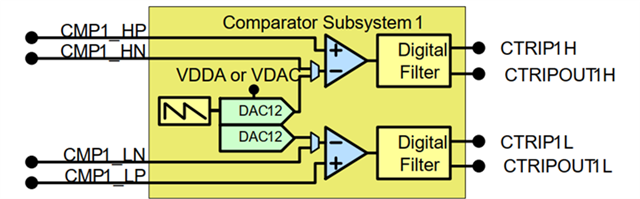
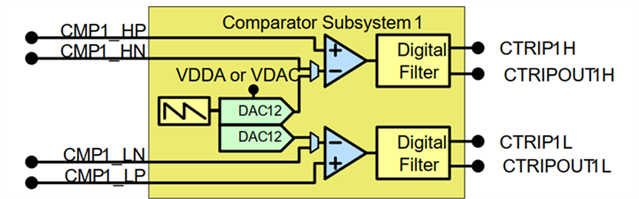
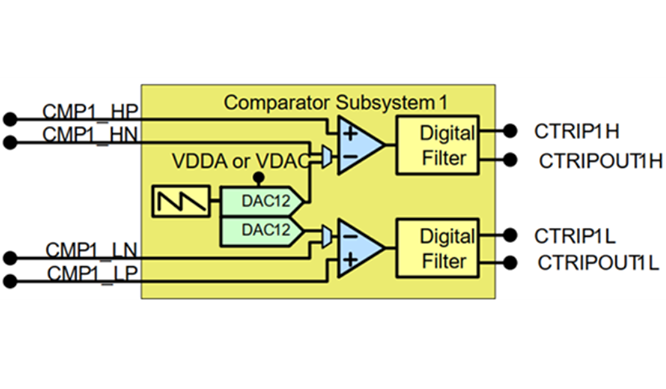
比較器子系統 (CMPSS) 模塊由模擬比較器和支持組件組成它們組合成一種拓撲結構,可用于功率應用,例如峰值電流模式控制,開關電源、功率因數校正和電壓跳閘監控。 每個CMPSS 模塊包括兩個模擬比較器、兩個可編程 12 位DAC、一個斜坡發生器和兩個數字濾波器。CMPSS有兩個輸出,一個是CTRIPH,送到芯片內部,可以和PWM模塊同步,配合使用。一個是CTRIPOUTH,可以通過OUTPUTXBAR 送到外部GPIO和系統其他模塊搭配使用。簡化的示意圖如圖1所示:
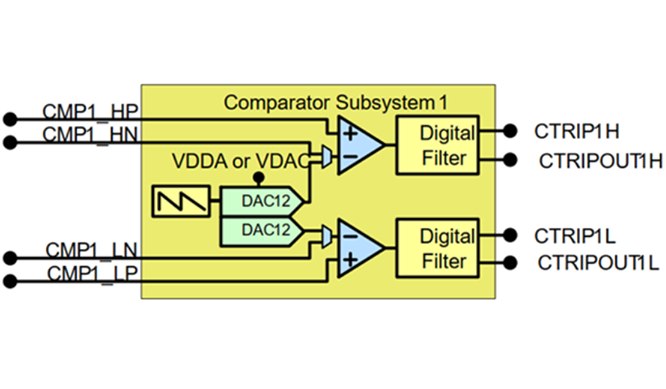
圖1 比較器子系統 (CMPSS)簡圖
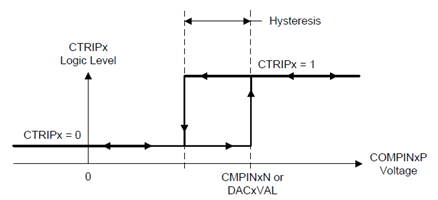
3. 比較器滯回功能的使用
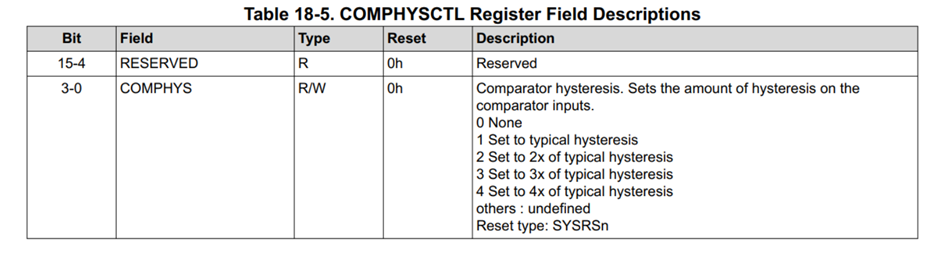
為了避免噪聲波動引起的比較器輸出的反復跳變,我們一般都會配置滯回比較。 C2000比較器的滯環是可以設定的,COMPHYSCTL的COMPHYS位可以設定滯環的環寬,當環寬設定為0時也就意味著沒有滯環。注意在規格書中,滯環的單位是LSB,所以它和CMPSS模塊內部的DAC的參考有關。如果內部DAC的參考電壓是3V,1LSB對應3V/4096=0.7mV。 以F28004x,F2807x,F2837x為例,其滯環可以在12LSB, 24LSB, 36LSB, 48LSB中選擇。具體可以在datasheet的電氣參數中看到。
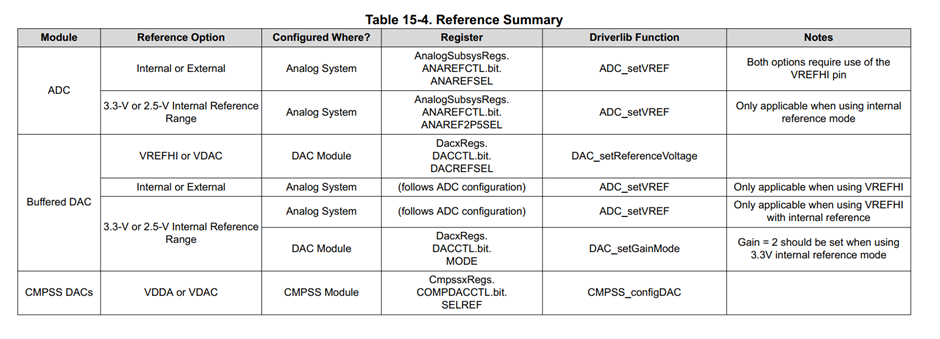
CMPSS內部DAC的參考可以看TRM (Technical Reference Manual) 中關于參考的介紹,可以在VDDA和VDAC中選擇:
設置滯回的寄存器是COMPHYS, 設置滯回也可以調用driverlib中的函數CMPSS_setHysteresis(uint32_t base, uint16_t value)。設置值和滯回環寬的關系可以看具體型號C2000的Technical Reference Manual中寄存器的解釋。
4. 數字濾波器的使用
當外部輸入的濾波電路設計不當時,會導致比較器被誤觸發的情況,C2000內部比較器還集成了可配置的數字濾波器,CMPSS數字濾波器的時鐘來源是系統時鐘, 預分頻(CLKPRESCALE)決定了濾波器的采樣率,濾波器的FIFO在每個分頻后時鐘采樣一次。數字濾波器在從輸入端采集的FIFO采樣(SAMPWIN)窗口上工作。濾波器輸出為采樣窗口內的多數值,其中多數由閾值(THRESH)定義。如果不滿足閾值,則濾波器輸出保持不變。具體的工作邏輯可以參考TRM(Technical Reference Manual)的Digital filter behavior,如圖2。
這里以F280049為例,需要注意的是,THRESH的值必須被設置為大于SAMPWIN/2并且小于或等于SAMPWIN。同時,FIFO中的舊數據將被丟棄。在用寄存器配置的情況下,對于SAMPWIN、THRESH和CLKPRESCALE,數字濾波器使用的內部數字在所有情況下都是+1。也就是說,samples=SAMPWIN+1,threshold=THRESH+1,pre scale=CLKPRESCALE+1。
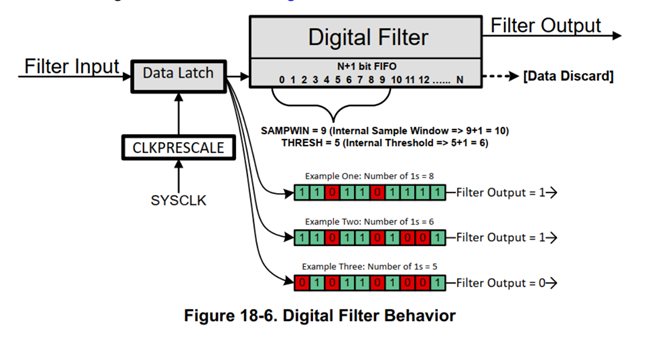
圖2 比較器濾波子模塊功能
也可以用driverlib函數配置,即在函數中配置相應的分頻值,采樣窗和閾值。
Void CMPSS_configFilterHigh(uint32_t base, uint16_t samplePrescale, uint16_t sampleWindow, uint16_t threshold);
Void CMPSS_configFilterLow(uint32_t base, uint16_t samplePrescale, uint16_t sampleWindow, uint16_t threshold);
5. 利用鎖存模式和外部模塊配合使用
CMPSS可以很方便地和PWM等其他內部外設配合使用,但是有些應用中,也需要把內部比較器的信號鎖存起來,比如傳給外部的IPM模塊等。CMPSS也支持這種模式,用戶可選擇穿透模式,和鎖存(Latch)模式,在鎖存模式下,可以將瞬間的過壓過流給到外部,保護外部的模塊不被損壞。
同時,也可以在比較器的輸出源中選擇通過或門的鎖存信號,也就是高低兩個寄存器的COMPCTL.CTRIPOUTLSEL和用COMPCTL.CTRIPOUTHSEL ,第三個輸入選項就是經過濾波器后的鎖存信號,也可以選擇0-異步模式或是和1-CPU時鐘同步,或是2-經過濾波器但是不鎖存的信號,具體選項和對應關系,可以參考圖3。
同樣的,也可以用Driverlib函數配置,在void CMPSS_configOutputsHigh(uint32_t base, uint16_t config)和void CMPSS_configOutputsLow(uint32_t base, uint16_t config)函數里面的config增加一個參數CMPSS_TRIPOUT_LATCH即可,TRIPOUT代表是將這個信號通過OUTPUTXBAR送到芯片外部GPIO。
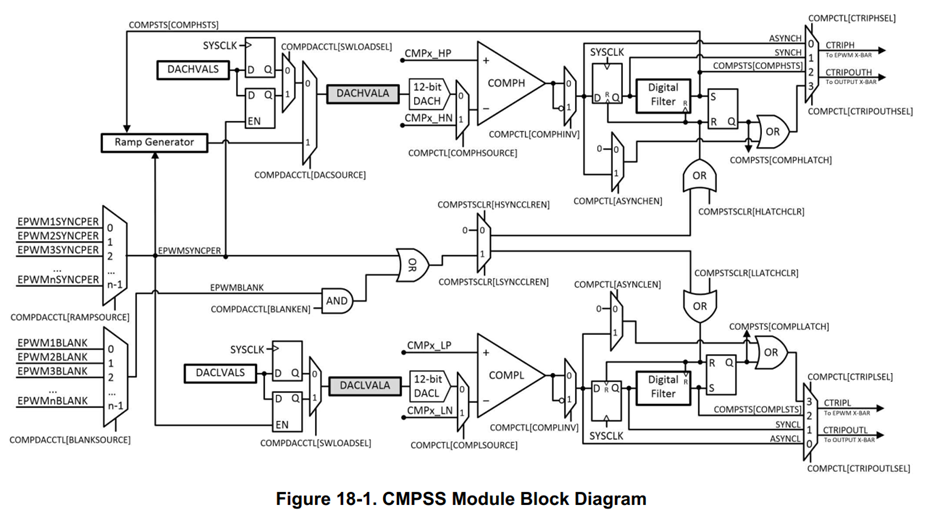
圖3 比較器子系統完整信號框圖
6. 和PWM配合使用的實際應用
傳統的保護方式是使用外部比較器,本文介紹的使用C2000內部的窗口比較器(ADC與比較器pin 腳共用)的方式,可以節省物料成本和布板空間。具體配置方法如下(完整代碼參考TIDM-02002 買電子元器件現貨上唯樣商城
針對 HEV/EV 車載充電器的雙向 CLLLC 諧振、雙有源電橋 (DAB) 參考設計):
第一步,選擇合適的CMPSS輸入的腳,查看TRM 的Table 15-2. Analog Pins and Internal Connections,并通過CMPSS的DAC 子模塊,配置合適的值; 這邊需要注意,比較器模塊的高低比較器的Positive input必須是外部AIO引腳,negative input 可以說DAC 的輸出或外部AIO引腳。
// set CMPSS H and L Positive input pins
ASysCtl_selectCMPHPMux(CLLLC_IPRIM_CMPSS_ASYSCTRL_CMPHPMUX,
CLLLC_IPRIM_CMPSS_ASYSCTRL_MUX_VALUE);
ASysCtl_selectCMPLPMux(CLLLC_IPRIM_CMPSS_ASYSCTRL_CMPLPMUX,
CLLLC_IPRIM_CMPSS_ASYSCTRL_MUX_VALUE);
// set DAC H and L values
CMPSS_setDACValueHigh(CLLLC_ISEC_TANK_CMPSS_BASE,
CLLLC_ISEC_TANK_DACHVAL);
CMPSS_setDACValueLow(CLLLC_ISEC_TANK_CMPSS_BASE,
CLLLC_ISEC_TANK_DACLVAL);
第二步,配置輸出,通過XBAR 將CMPSS的高和低兩個比較器的結果,映射到XBAR_TRIP5和XBAR_TRIP7;
XBAR_setEPWMMuxConfig(XBAR_TRIP5,
CLLLC_IPRIM_TANK_H_PWM_XBAR_MUX_VAL);
XBAR_enableEPWMMux(XBAR_TRIP5,
CLLLC_IPRIM_TANK_H_XBAR_MUX);
XBAR_setEPWMMuxConfig(XBAR_TRIP7,
CLLLC_IPRIM_TANK_L_PWM_XBAR_MUX_VAL);
XBAR_enableEPWMMux(XBAR_TRIP7,
CLLLC_IPRIM_TANK_L_XBAR_MUX);
第三步,PWM trip配置,將XBAR_TRIP5和XBAR_TRIP7分別配置給Digital Trip Event A2和B2, 當輸出為高時,可以觸發PWM動作。
7. 總結
在本文中,我們討論了通過 C2000內部集成的模擬比較器功能,在增加系統功能的同時減少外部組件的需求,同時提供了更多的數字編程控制的靈活性,這種實現還可以幫助節省成本和電路板空間,本文還通過幾個具體案例詳細介紹了集成模擬比較器的使用方法。更多相關應用、硬件和軟件的示例,請參閱 TI 官網提供的C2000開發工具、應用手冊、設計指南、硬件原理圖和軟件示例。
參考文獻
TMS320F28002x Real-Time Microcontrollers Technical Reference Manual (Rev. A)
TMS320F28004x Real-Time Microcontrollers Technical Reference Manual (Rev. D)
Design Guide: TIDM-02002 Bidirectional CLLLC Resonant Dual Active Bridge (DAB) Reference Design for HEV/EV Onboard Charger
來源:TI
作者:Emma Wang
松下汽車類6軸單芯片MEMS慣性傳感器,提高車載系統的安全性和舒適性
據麥姆斯咨詢介紹,在當下的“萬物電氣化(electrification of everything)”時代,傳感器已成為一個必不可少的先決條件:汽車、巴士、摩托車、無人送貨車、建筑機械和許多其它車輛配備越來越多的傳感器,以實現安全且舒適的輔助駕駛/自動駕駛。全面的感知能力對于支持運動檢測、定位、導航、數據融合等許多用途至關重要。
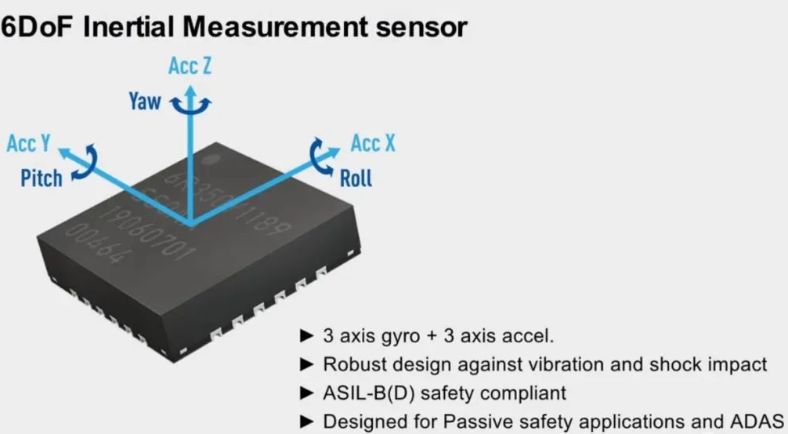
為此,松下機電(Panasonic Industry)開發出汽車類6軸MEMS慣性傳感器系列,即MEMS慣性測量單元(IMU),該系列產品通過單芯片解決方案面向車載領域的功能安全(ISO26262)為車身穩定控制、ADAS和自動駕駛等系統提供慣性感知功能,并且符合ASIL-B(D)標準,具有高水平的功能安全性及自診斷功能。
松下汽車類6軸MEMS慣性傳感器
過去用于車載系統的慣性傳感器,其角速度和加速度的感測元件是由多顆芯片構成的,因此面臨因角速度和加速度的軸偏離而影響輸出精度的問題。松下推出的新型高質量、高可靠的6軸MEMS慣性傳感器系列,也稱為“6合1傳感器”,單顆芯片集成了3軸MEMS陀螺儀和3軸MEMS加速度計,即利用基于單芯片MEMS技術實現高6軸正交性(軸間正交性≦0.01°),為提高車載系統的安全性能和設計自由度做出貢獻。
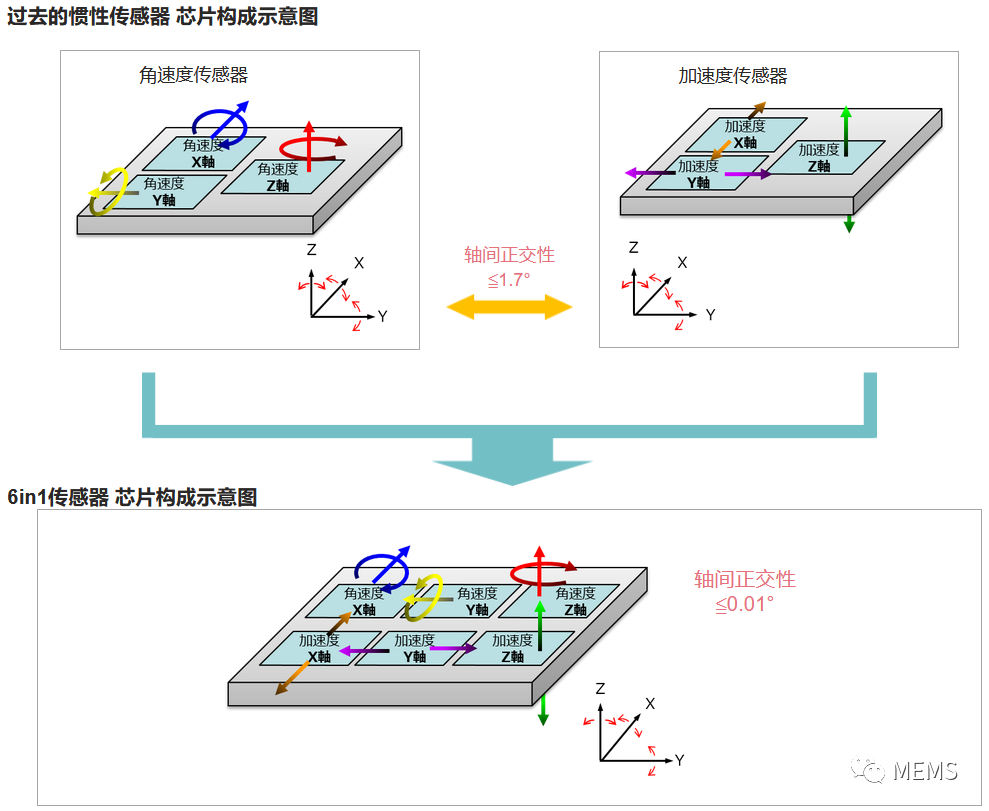
松下汽車類6軸MEMS慣性傳感器采用單芯片解決方案
松下汽車類6軸MEMS慣性傳感器采用電容式MEMS感測技術,通過晶圓級封裝使得蓋帽、MEMS和ASIC形成一體,實現了小型化的6軸慣性傳感器,封裝尺寸為4.5 mm x 4.5 mm x 1.1 mm。由此,為車載系統的綜合化和車載ECU的小型化做出了貢獻。
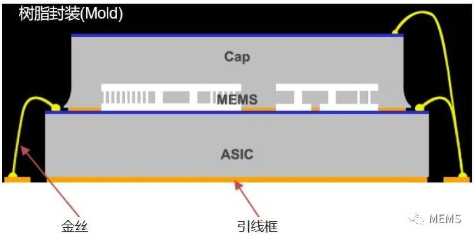
松下汽車類6軸MEMS慣性傳感器剖面圖
該慣性傳感器封裝形式為可潤濕側翼QFN。松下借助凹痕加工技術,使得這種封裝外殼引腳的側面能夠形成可目視的焊腳。由此,通過焊腳的目視檢查,即可確認引腳是否已被正常地焊接到基板的焊盤上。這可以實現高質量焊接,從而實現無差錯裝配,這對于汽車安全性、舒適性,以及工業應用都至關重要。
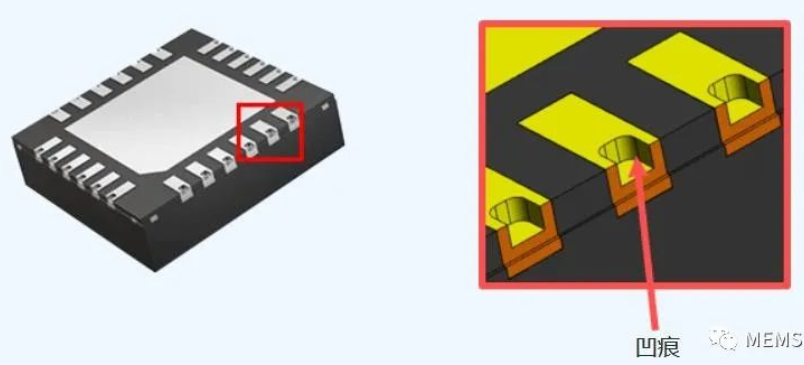
慣性傳感器封裝引腳凹痕加工示意圖
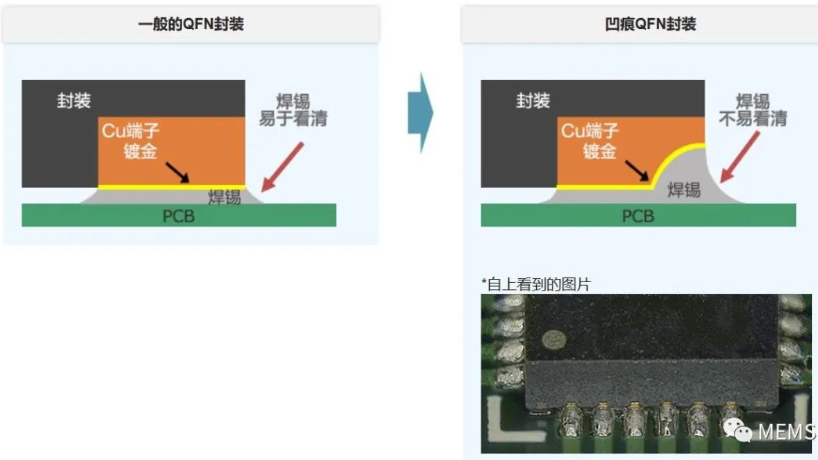
貼裝完后的慣性傳感器外觀示意圖
松下汽車類6軸MEMS慣性傳感器的一個關鍵用途是可以在劇烈振動的情況下(例如當汽車突然沖出道路時)檢測車輛的運動狀況,然后利用傳感器數據來調整馬達的扭矩和制動力,以實現安全的車輛狀態。
該6軸慣性傳感器還成功實施了與汽車安全相關的雷達(RADAR)/激光雷達(LiDAR)應用。通常,雷達/激光雷達會出現安裝偏移,例如在車輛工廠組裝和經銷商運輸過程中。因此需要工廠或經銷商對此類安裝偏移進行校準,使其不影響雷達/激光雷達的探測方向或被探測物體在3D地圖中的位置精度。為此,工廠或經銷商在靜止情況下使用3軸加速度計進行傾斜檢測以測量安裝偏移,并且在運動情況時,還會使用3軸陀螺儀來測量偏移。
雷達/激光雷達可以搭配6軸慣性傳感器以獲得姿態(橫滾、俯仰和偏航)及地理坐標信息,助力自動駕駛汽車實現更加安全的導航和定位功能。對于掃描周期較長的激光雷達等傳感器,車載系統需要將上一個周期檢測到的周圍環境3D點云與當前周期檢測到的3D點云進行比較。通過使用來自6軸慣性傳感器的車輛運動數據,可以減少匹配上一個周期的3D點云和當前周期的3D點云的計算量。
在汽車行駛時,6軸慣性傳感器能夠動態地檢測道路的起伏,車載系統根據傳感器數據可修正雷達/激光雷達照射位置或探測到的物體在地圖上的位置。尤其是在GNSS(全球導航衛星系統)信號被阻擋時(例如隧道中),基于慣性傳感器的航位推算(DR)可以計算出當前車輛的位置,保證連續定位、穩健駕駛。
除了這些與汽車安全相關的應用之外,該6軸慣性傳感器還成功地應用于AR-HUD(增強現實抬頭顯示)系統等舒適性應用。在這個用例中,慣性傳感器檢測車輛的運動,并可以使用“AR.markers”調整AR-HUD光束的位置,以便駕駛員以最佳方式觀看。另一個與舒適性相關的應用是主動懸架系統,其通過慣性傳感器采集車輛姿態信息,經過主動懸架控制器計算,向四輪減震器輸出軟硬不同的阻尼控制,最后通過控制四個減震器內部的電磁閥來動態調整懸架軟硬。
松下目前正在進行不同實施狀態的多個項目,推動商業應用領域也使用6軸慣性傳感器。例如,自動駕駛巴士可以借助6軸慣性傳感器來計算車輛是否在預定義的路徑上。自主叉車受益于6軸慣性傳感器提供的安全性和舒適性——例如防止貨物從叉車上掉落。這些也適用于其它“即將實現自主運行”的機械——例如割草機、鐵路列車或壓實機。
審核編輯黃宇
-
濾波器
+關注
關注
162文章
8154瀏覽量
182352 -
比較器
+關注
關注
14文章
1850瀏覽量
109376 -
dac
+關注
關注
44文章
2415瀏覽量
194153 -
數字電源
+關注
關注
28文章
544瀏覽量
110029
發布評論請先 登錄
基于C2000內部集成的模擬比較器功能

C2000內置比較器誤差來源及校正方法-F28004x, F2807x, F2837x
使用C2000內部比較器替外部比較器
C2000內置比較器誤差來源及校正方法
使用C2000內部比較器替外部比較器
C2000?ADC(Type-3)性能與ACQPS的比較






 工商網監
工商網監
評論