 選擇雙向轉換器控制方案
選擇雙向轉換器控制方案

48V-12V雙電池電源系統正普通用于輕度混合動力電動車。車輛的動態工作條件可能需要在兩個電池軌道之間來回傳送高達10kW的電功率。由于移動車輛中的各種操作情況,控制一個方向或另一個方向上的功率流需求可以說是一個相當復雜的任務,需要數字控制方案的智能。因此,當領先的汽車制造商和一級供應商開始開發48V-12V雙向電源轉換器時,大多數都采用了全數字方法。
全數字解決方案成本昂貴,因為它們需要許多離散的模擬電路。這些模擬電路包括精密電流檢測放大器、功率MOSFET柵極驅動器、監視和保護電路等。由于電路板上的設備數量龐大,離散解決方案顯得笨重且不可靠。為了減少解決方案尺寸和降低成本,同時提高性能和系統級可靠性,一些一級供應商正在尋找一種混合架構,其中微控制器處理更高級別的智能管理,且高度集成的模擬控制器實現電源轉換器級。在這篇博文中,我將討論如何確定這種模擬控制器的最合適的控制方案。
表1總結了不同控制方案的優點和缺點。
| 特性 | 電壓模式 | 峰值電流模式 | 傳統的平均電流模式 | TI專有平均電流模式(LM5170) |
| 對所有負載條件都具有良好的抗噪聲能力 | √ | √ | √ | |
| 一階系統,易于補償 | √ | √ | √ | |
| 支持多相并行操作 | √ | √ | √ | |
| 無需斜坡補償 | √ | √ | √ | |
| 出色的直流電流調節,不受電源電感公差的影響 | √ | √ | ||
| 無論電壓和負載條件如何,恒定電流環增益 | √ | |||
| 無論操作條件如何,單向補償穩定雙向操作 | √ |
表1:控制方案比較
A48V-12V雙向轉換器通常必須具有高精度的電流調節(優于3%),以便精確地控制從一個電池軌到另一個電池軌傳輸的功率量。由于高功率,系統通常需要交錯并行操作中的多相電路,以共享總負載,并且共享應當在各個相之間均衡。因此,電壓控制模式不適合,因為其不能實現多相共享。
基于峰值電感器電流生成脈沖寬度調制(PWM)信號的峰值電流模式控制方案可實現多相共享。然而,共享平衡很大程度上受功率電感器公差的影響。功率電感器通常具有±10%的公差,導致顯著的共享誤差,從而導致不同相位的失衡功率耗散。更糟的是,電感器的峰值電流具有與DC電流的固有誤差,導致電流調節較不精確,進而導致功率輸送不太準確。
傳統的平均電流模式控制方案解決了峰值電流模式控制的電流誤差問題,因為它調節了平均電感電流,并消除了電感公差對電流調節的影響。然而,電廠傳遞函數隨著工作電壓和電流條件而變化,并且雙向操作需要兩種不同的環路補償。
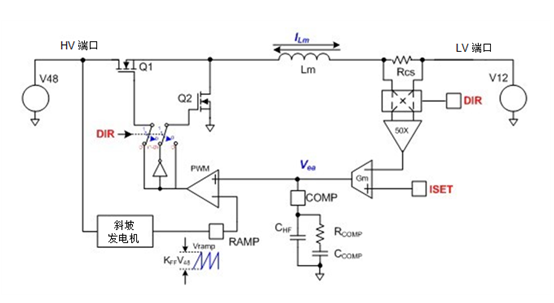
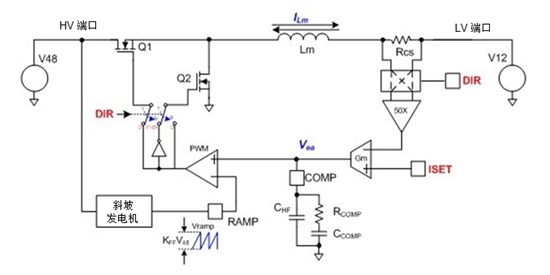
為了克服常規平均電流模式控制方案的挑戰并簡化實際電路實現,TI為48V-12V雙向轉換器工作開發了創新的平均電流模式控制方案,如圖1和表1所示。功率級包括:
高側FET(Q1)。
低側FET(Q2)。
功率電感器(Lm)。
電流檢測電阻(Rcs)。
兩個電池,一個在HV端口,另一個在LV端口。
控制電路包括:
增益為50的電流檢測放大器,通過方向指令DIR(“0”或“1”)進行方向轉向。
跨導放大器用作電流環路誤差放大器,在非反相引腳施加參考信號(ISET),以設置相位直流電流調節值。
PWM比較器。
與HV-Port電壓成比例的斜坡信號。
由DIR控制的轉向電路,用于施加PWM信號以控制Q1或Q2作為主開關。
COMP節點處的環路補償網絡。
Rcs感應電感電流,且信號被放大50倍。該信號被發送到跨導放大器的反相輸入,導致COMP節點處的誤差信號,該節點也是PWM比較器的非反相輸入的節點。比較誤差信號和斜坡信號產生PWM信號。由DIR命令控制,PWM信號可控制Q1進行降壓模式操作,并強制電流從HV端口流向LV端口,或當發送到Q2時,反轉電流流動的方向。
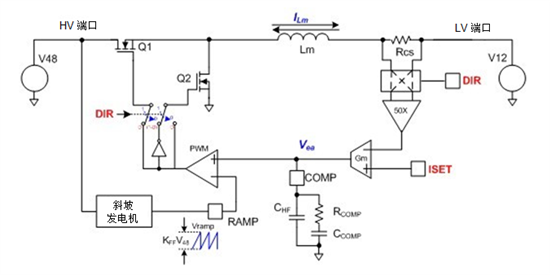
圖1:TI專用平均電流模式控制方案的雙向電流轉換器
| 操作模式 | 電廠傳遞函數 |
| 降壓模式:電流從HV端口流向LV端口 |
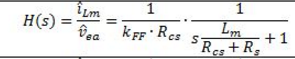 |
| 升壓模式:電流從LV-端口流向HV-端口 |
 |
表2:變流器功率裝置傳遞函數(KFF是斜坡發生器系數;Vramp = KFF×VHV-端口;Rs是沿著功率流路徑的有效總電阻,不包括Rcs)
表2所示為新控制方案的優點。電廠傳遞函數對于雙向操作是相同的,它是一階系統。此外,傳遞函數與諸如端口電壓和負載電流水平的操作條件無關。因此,應用單個II型補償網絡將在所有工作條件下始終穩定雙向轉換器,大大簡化了實際電路的運用,并提高了性能。
TI的專有平均電流模式控制方案適用于汽車48V-12V雙向電流控制器。它需要單個II型補償網絡來覆蓋雙向操作,而不管操作條件如何。電流調節精度——盡管存在電感公差,但均勻共享高功率等的自然的多相并聯操作將大大簡化高性能的雙向轉換器設計。TI在LM5170-Q1多相雙向電流控制器中實現了這種控制方案。
審核編輯:郭婷
-
電源
+關注
關注
185文章
18326瀏覽量
255593 -
轉換器
+關注
關注
27文章
8995瀏覽量
151201 -
電動車
+關注
關注
73文章
3077瀏覽量
115803 -
電池
+關注
關注
84文章
11036瀏覽量
134482
發布評論請先 登錄
如何正確選擇雙向轉換器控制方案
11kW 雙向 DCDC 轉換器系統方案(原理圖+BOM+PCB)
雙向轉換器控制方案的選擇
雙電池汽車系統有哪些挑戰和機遇
電子書:DC-DC 轉換器的應用與設計方案
雙向DC-DC轉換器的設計與分析
雙向DC-DC轉換器的設計與分析
選擇雙向轉換器的控制方案
選擇雙向轉換器控制方案
TI參考設計 雙向非隔離式降壓升壓轉換器的詳細方案

如何為現代電動汽車設計雙向降壓-升壓轉換器
AD9684: 14-Bit, 500 MSPS LVDS, 雙向數字轉換轉換器 ADI

使用C2000 MCU對用于數字控制的雙向降壓/升壓轉換器進行建模






 工商網監
工商網監
評論