") 無人機(jī)禁飛區(qū)如何進(jìn)行三維重建 |手持激光雷達(dá)手持SLAM
無人機(jī)禁飛區(qū)如何進(jìn)行三維重建 |手持激光雷達(dá)手持SLAM

在大范圍測繪場景下,無人機(jī)作業(yè)已經(jīng)成為主流手段。但在部分禁飛或難以起飛的區(qū)域,如機(jī)場周邊、密集城區(qū)、敏感建筑周圍等特殊區(qū)域,就需要其他替代采集手段。
傳統(tǒng)方式主要采用架站式儀器,數(shù)據(jù)獲取過程多為單點式采集,耗時耗力。后處理時,需要多段數(shù)據(jù)拼接校正,過程冗長。

靈光Lixel L1采用視覺、激光及慣導(dǎo)融合建模手段,邊采集邊建模,無需后解算,采集后即時直出通用 LAS 格式結(jié)果,后處理方便高效,是禁飛區(qū)采集的高效手段。
- 采集實例-
西南某機(jī)場周邊區(qū)域
測區(qū)由于臨近機(jī)場,處于無人機(jī)禁飛區(qū)。整體面積約 0.4 平方千米,區(qū)域覆蓋農(nóng)田、電網(wǎng)、公路及住宅等環(huán)境。

客戶采用靈光Lixel L1+RTK套件的方式,對該區(qū)域進(jìn)行三維數(shù)據(jù)采集及建模。采集過程中,通過預(yù)覽界面的實時點云及軌跡來判斷工作情況及數(shù)據(jù)質(zhì)量。
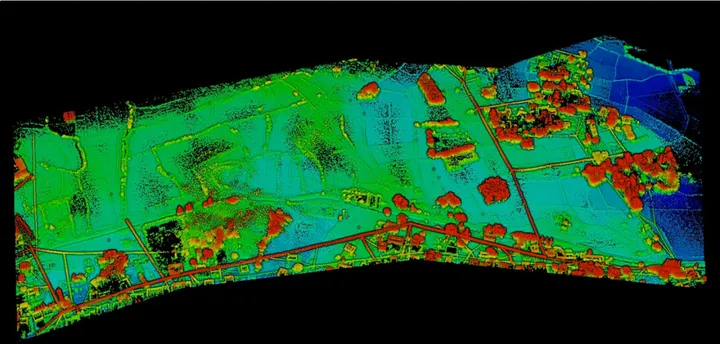
采集結(jié)束后,通過后處理軟件LixelStudio進(jìn)行全局優(yōu)化,獲取有絕對坐標(biāo)的三維數(shù)據(jù),并生成DEM/DSM等數(shù)據(jù)結(jié)果。
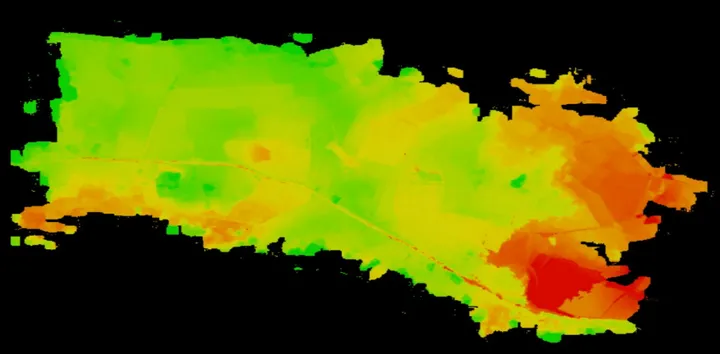
▲DEM
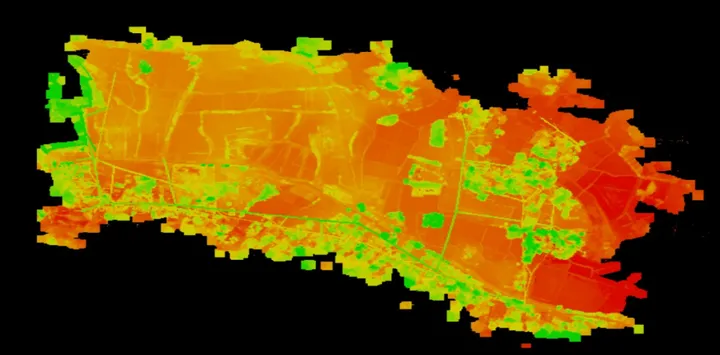
▲DSM
經(jīng)驗證,數(shù)據(jù)平面及高程誤差均在5厘米以內(nèi),滿足客戶需求。
靈光Lixel L1采用視覺、激光、慣導(dǎo)Mutil-SLAM算法,兼顧采集效率及采集精度,后處理便捷高效,在城市、室內(nèi)、地下及航空器禁飛區(qū)域等環(huán)境下,有極為明顯的優(yōu)勢。
Ps:
靈光Lixel L1不僅可以手持作業(yè),也可以搭載在無人機(jī)上,既有精度,也有效率。真是上天入地?zé)o所不能了呢~
審核編輯黃宇
-
無人機(jī)
+關(guān)注
關(guān)注
231文章
10843瀏覽量
186768 -
SLAM
+關(guān)注
關(guān)注
24文章
441瀏覽量
32503 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4235瀏覽量
192847
發(fā)布評論請先 登錄
航天宏圖全棧式3DGS實景三維重建系統(tǒng)解決方案

無人機(jī)光伏電站智能巡檢系統(tǒng)中應(yīng)用的技術(shù)都有哪些?

10000Hz!超高頻激光雷達(dá)助力無人機(jī)避障
鐳神智能 MS09 超遠(yuǎn)距低空管控反無人機(jī)探測激光雷達(dá):為低空經(jīng)濟(jì)筑牢安全防線

使用DLP LightCrafter4500投影結(jié)構(gòu)光進(jìn)行三維重建遇到的疑問求解
三維測量在醫(yī)療領(lǐng)域的應(yīng)用
思看科技手持三維激光掃描儀三種工作模式介紹

海外首款由激光雷達(dá)驅(qū)動的無人機(jī)發(fā)布
激光雷達(dá)技術(shù)或可助力防御無人機(jī)
三維激光掃描儀與無人機(jī)結(jié)合的應(yīng)用
激光雷達(dá)在SLAM算法中的應(yīng)用綜述

激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進(jìn)步
激光雷達(dá)在無人機(jī)中的應(yīng)用實例
鐳神智能激光雷達(dá)低空無人機(jī)目標(biāo)追蹤光電系統(tǒng):筑牢機(jī)場低空安防屏障





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論