") 一文詳解激光雷達原理之光學(xué)原理
一文詳解激光雷達原理之光學(xué)原理

之前我們講到激光雷達根據(jù)接收原理一般分為iTOF/ dTOF(SPAD/ APD),根據(jù)掃描方式又可以分為機械旋轉(zhuǎn)式激光雷達/ 半固態(tài)(有的也叫混合固態(tài))激光雷達/ 固態(tài)激光雷達/ Flash/OPA 等等,這個以后會講到(又給自己挖坑了hhh)。但他們的最小組成單元比較類似:發(fā)射端:光源+發(fā)射透鏡,接收端:sensor+接收透鏡。本文基于目前較多的機械旋轉(zhuǎn)式/混合固態(tài)式,講講其中的光學(xué)原理
光源
激光雷達的光源當(dāng)然是激光,常用的一般兩個波段
905nm波段通常是用EEL(Edge-Emitting Laser)邊發(fā)射激光器,VCSEL(Vertical-Cavity Surface-Emitting Laser)垂直腔面發(fā)射激光器。
1550nm波段,通常需要用到光纖激光器。
波長的選擇
為什么會用到這兩個波段呢,主要是根據(jù)兩方面的約束
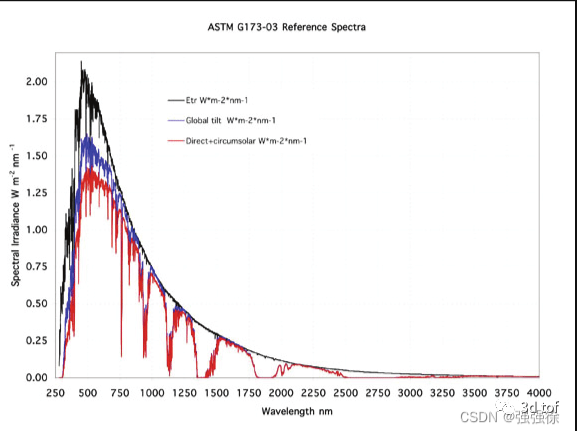
自然光的光譜
905nm也好,1550nm也好,在自然光光譜中占比重較小,即在相同的自然光強下,這個波段的強度較低,使得經(jīng)過濾光片過濾后,噪聲較小。這個自然光光譜的具體數(shù)值可以通過ASTM G173查到,我之后會看一下這里能否上傳文件,可以的話我會上傳上去,大家可以在我的主頁找找。
人眼安全
參考IEC60825-1 消費級的激光雷達都會要求人眼安全級別達到class 1,人眼安全除了跟激光的能量強度、FOV、脈沖時間、脈沖峰值功率、平均光功率有關(guān)外,還和波長相關(guān)。
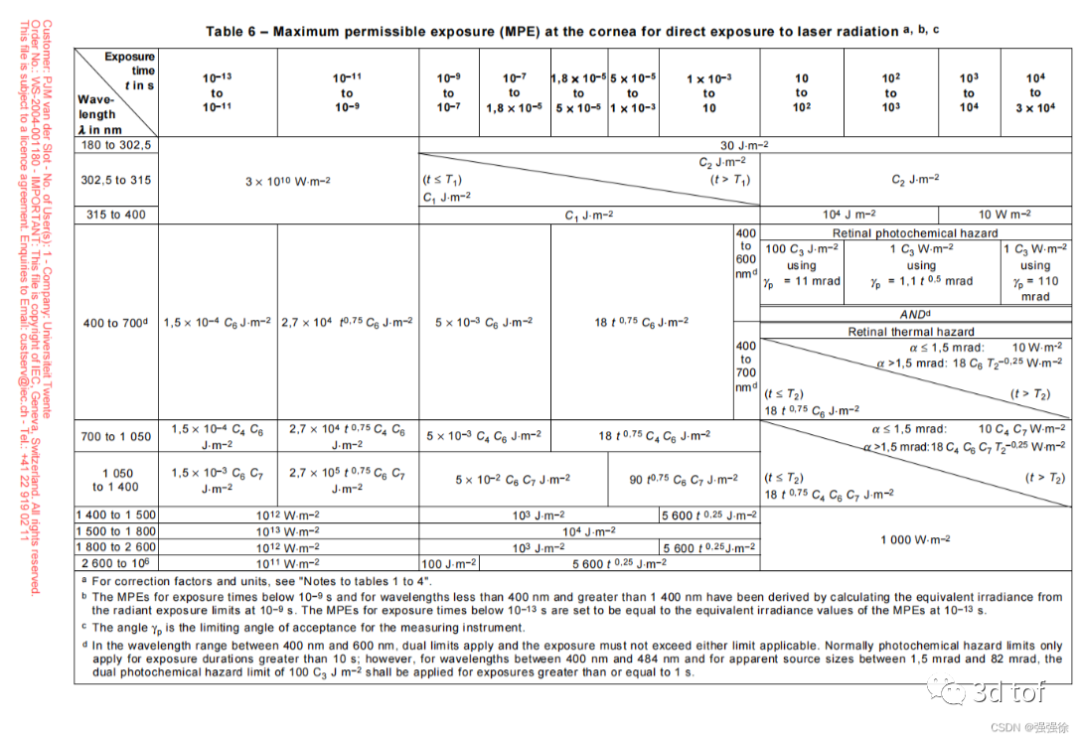
1550nm的激光會被晶狀體和角膜吸收,所以在class 1的標(biāo)準(zhǔn)下,使用1550nm的光源可以使用更高的功率。當(dāng)然1550nm的光源也有其他的優(yōu)劣,成本,特定場景下回波能量低之類的,先不在這里展開了。同樣的,IEC60825-1也有相關(guān)文件,我會看看是否可以上傳。
光束質(zhì)量
因為光源是激光,是存在快慢軸(快軸是垂直于激光芯片正表面的,慢軸是平行于芯片表面的,一般快軸的發(fā)散角大,慢軸反之)和束腰的,所以激光光束質(zhì)量的好壞是光源選擇的關(guān)鍵。判斷激光光源光束質(zhì)量的常用表達方式是BPP(Beam-Parameter Product)光參數(shù)積(當(dāng)然還有M^2,這里就講BPP吧),BPP的定義:
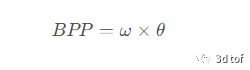
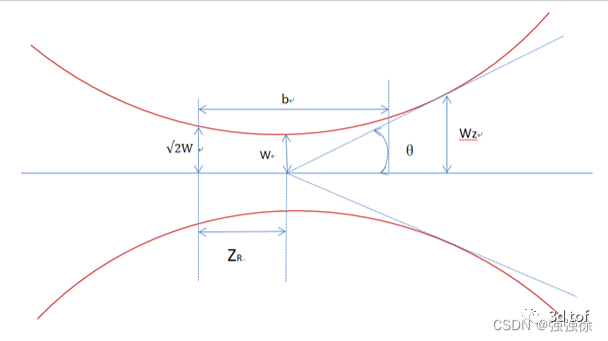
其中ω 是束腰半徑,θ 是遠場發(fā)散半角。BPP是一個恒定值,在不損失能量的情況下,利用光學(xué)系統(tǒng)對激光的任意一項進行調(diào)整,另一項都會發(fā)生相應(yīng)的改變。可以看出,BPP越小,光束能量越集中,光束質(zhì)量就越好。
而因為部分激光雷達(如車載)有遠距離測距的要求,為了保證足夠的分辨率,需要激光的彌散斑在遠距離也保持的很小,所以需要將激光的出射角準(zhǔn)直到很小(這里會在下文出射透鏡環(huán)節(jié)進一步講),而又為了回波能量能夠被探測到,所以需要其能量足夠集中嗎。所以選擇一個BPP很小的激光器是關(guān)鍵的。
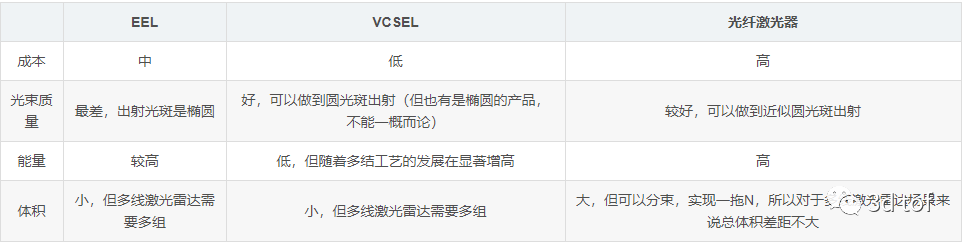
EEL vs VCSEL vs 光纖激光器
這里用個表格來表示吧:
中心波長偏移
通常溫度的變化會給激光器的中心波長帶來變化,不同批次的激光器中心波長也會有一定程度的便宜,這使得對濾光片的帶寬要求變寬,從而會讓更多的環(huán)境光作為噪聲進入sensor,減小信噪比。
發(fā)射透鏡
發(fā)射透鏡主要是為了準(zhǔn)直,因為光源是激光,快慢軸需要用柱面鏡分開單獨準(zhǔn)直(當(dāng)然對于快慢軸發(fā)散角一致的光源來說可以用一個凸面鏡來準(zhǔn)直),準(zhǔn)直后的發(fā)散角一般用m r a d mradmrad(毫弧度)為單位來表示。相同能量下,發(fā)散角越小,激光雷達能測到的距離就更遠,測距分辨率越高。
接收透鏡
接收透鏡與Sensor的類型有關(guān),如果Sensor只有單個pixel,那么接收透鏡是非成像的,只用FOV與發(fā)射透鏡匹配即可。
如果是面陣的Sensor,那就和camera透鏡的方式一致,物像關(guān)系需要對應(yīng)。
Sensor
Sensor的種類之前講過了(不過也還有FMCW OPA沒講),當(dāng)然不同波長的光源,選用的Sensor也有所不同。
光路分類
主要分兩種方式:旁軸&同軸
這里我畫了兩張圖(是不是很用心,沒在網(wǎng)上找了)
旁軸系統(tǒng)

發(fā)射端和接收端是不同的光路,發(fā)射端和接收端之間的物理距離被稱為Baseline,Baseline的大小,光源和發(fā)射透鏡組成的發(fā)射端的發(fā)散角,Sensor和接收透鏡組成的接收端的視場角,共同決定了旁軸光路系統(tǒng)的有效測距范圍(可以用簡單的三角關(guān)系來計算)。可以看出,旁軸系統(tǒng)在近距離是存在盲區(qū)的(即近距離是無法測距的,而其實因為發(fā)散角的邊緣并不是完全無光(定義為1 / e^2的位置),所以因為SPAD的高感光能力,SPAD應(yīng)用中近距離的盲區(qū)會遠小于理論盲區(qū))。所以,考慮到分辨率和盲區(qū)大小,旁軸系統(tǒng)會希望Baseline盡可能的小,發(fā)射端的發(fā)散小要盡可能的小,而接收端的視場角需要略大于發(fā)射端,但不能大太多(因為大太多會引入更多的環(huán)境噪聲)。對于同樣一個目標(biāo)靶來說,旁軸系統(tǒng)接收到的能量隨著距離的遠近的線性度會較差,且會因為極線約束在sensor靶面上的投影也會隨距離偏移(而大多數(shù)sensor不同位置對于能量的響應(yīng)也是有所不同的)。
同軸系統(tǒng)
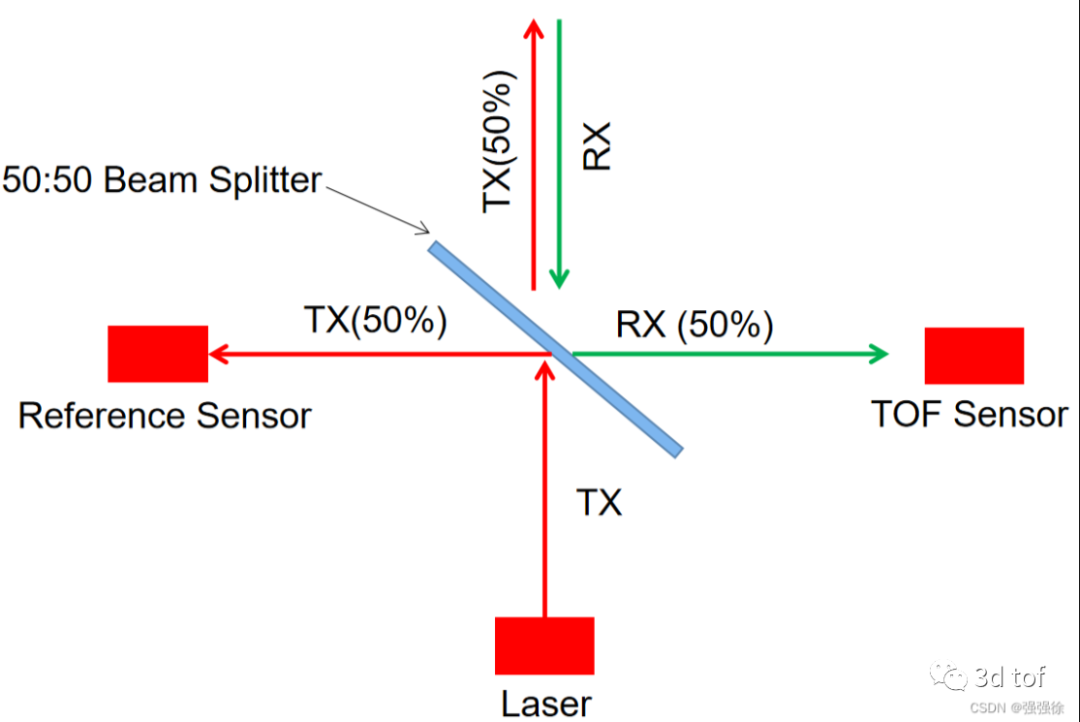
發(fā)射端和接收端是相同光路的系統(tǒng),利用分光鏡來對發(fā)射/接收光線進行半透半反,因為是相同的光路,發(fā)射和接收的角度可以做到相同,且不存在盲區(qū),同軸的系統(tǒng)不存在極線約束,其能量隨距離的線性度也會更好。然而因為分光鏡的存在,同軸系統(tǒng)對于光源能量的要求更高(在圖中也很好看出,出射能量會被削弱50%,接收能量又會被削弱50%)。且同軸系統(tǒng)的裝配難度及體積也會比旁軸系統(tǒng)要大。
PS. 這里引入了一個reference sensor的概念,因為溫漂會影響發(fā)射系統(tǒng)的出光延時,所以只記錄電路上的start 出光信號時間會受到溫度的影響使得測距的信息不準(zhǔn)確,而光的start 信號出光延時是同步的,所以利用reference sensor可以更好的跟隨溫漂后的實際出光時間,獲得更準(zhǔn)確的start時間,從而抑制溫漂對TOF測距產(chǎn)生的影響。
光學(xué)鏈路分析
分析方式各種paper沒有太過統(tǒng)一,但大致需要考量的因素差不太多。我會分為兩塊來講講我的理解
背景噪聲建模
《Modeling and Analysis of a Direct Time-of-Flight Sensor Architecture for LiDAR Applications》這篇文章提到可以用普朗克黑體輻射定律和泊松分布來建模


信號/回波衰減建模


其他
當(dāng)然,這里是簡單的模擬,像目標(biāo)物反射可以用朗伯散射的模型,IR的透過率引入IR的帶通數(shù)值以及太陽光的光譜數(shù)據(jù)(根據(jù)剛才提到的ASTM G173),發(fā)射與接收之間的baseline以及弧面光功率到平面目標(biāo)物的散射截面積,如SPAD的雪崩觸發(fā)的泊松/負二項分布,電路的散彈噪聲/暗電流/熱電流都可以被考慮到。
審核編輯 :李倩
-
激光器
+關(guān)注
關(guān)注
17文章
2731瀏覽量
62650 -
光譜
+關(guān)注
關(guān)注
4文章
919瀏覽量
36071 -
激光雷達
+關(guān)注
關(guān)注
971文章
4232瀏覽量
192792
原文標(biāo)題:一文詳解激光雷達原理之光學(xué)原理
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
激光雷達分類以及應(yīng)用
常見激光雷達種類
激光雷達面臨的機遇與挑戰(zhàn)
激光雷達究竟為什么這么牛,這么貴
固態(tài)設(shè)計激光雷達
一文詳解激光雷達核心指標(biāo),實用性和可靠性第一
激光雷達知多少:從技術(shù)上講講未來前景
一文詳解自動駕駛激光雷達技術(shù)

一文詳解激光雷達超全分類!

一文解析激光雷達結(jié)構(gòu)

一文詳解激光雷達






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論