 MGT-PR小鼠步態行為分析系統說明
MGT-PR小鼠步態行為分析系統說明

一、簡介:
MGT-PR大小鼠步態行為分析系統(gait)是指大小鼠行走時所表現的姿態。大小鼠步態分析系統基于原有足跡分析方法(footprint analysis),運用技術對足印分析法進行了改進,通過足印圖像增強技術采用高速攝像機可以清晰地采集大小鼠行走過程的足印信息,然后利用步態分析系統自動識別分析大小鼠足跡的步行周期、支撐距離、支撐時長、擺動時長、制動時長、推進時長、步頻等60余種指標,以此客觀、準確和全面地反映動物步態的變化情況。而且本步態分析系統集數據采集、監測、分析、統計處理、繪圖制表、打印輸出于一體,避免繁重的人工勞動,提高實驗的自動化程度。本儀器可應用于腦缺血、阿爾茨海默病、帕金森氏病、腦外傷、脊髓損傷、疼痛疾病、關節炎等多種疾病動物模型步態的研究。
 MGT-PR大小鼠步態行為分析系統
MGT-PR大小鼠步態行為分析系統二、技術亮點
1、廠商:安徽正華生物儀器設備有限公司,O561-6O623O7,
2、獨立自主跑輪,由籠體,跑輪和智能長度計組成。
3、自主跑輪系統,小動物自主跑輪系統最多由多個獨立自主跑輪及數據采集器、計算機與軟件三大部分組成,系統可由 2 - 16 個
獨立自主跑輪組成(任選)。標準配置由 8 個跑輪組成。
三、軟件參數:
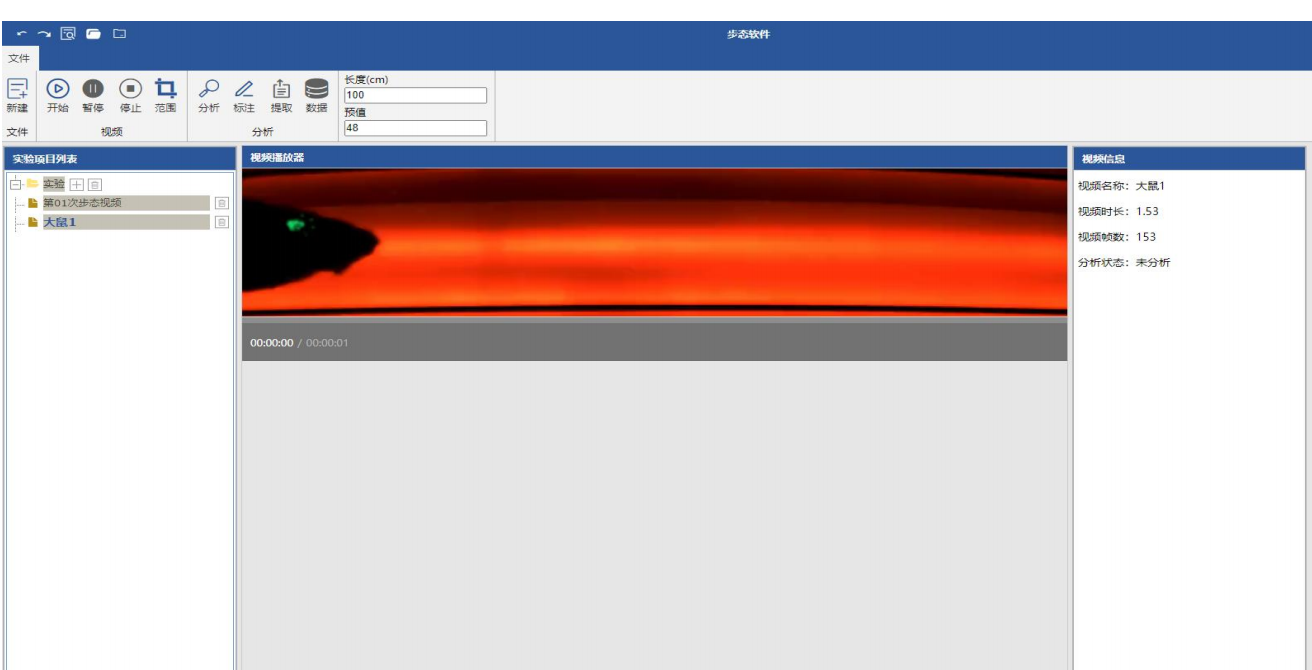
1、軟件可以通過前端頁面對未分析的實驗小(大)鼠視頻進行范圍的選擇。
2、軟件可以使用算法識別分析實驗小(大)鼠視頻每一幀的腳印輪廓。
3、軟件可以對正在算法分析的小(大)鼠視頻并且完成后進行手工校驗。
4、軟件可以實現手工分析實驗小(大)鼠視頻每一幀的腳印輪廓。
5、軟件可以通過圖表或者可視化的形式進行指標數據的展示。
四、指標評價體系:
步行周期:動物行走時一側足跟著地到該側足跟再次著地的過程被稱為一個步行周期,一個步行周期可分為支撐
相(stance phase)和擺動相(swing phase)。
支撐時長:在一個步行周期中始終與地接觸的階段。
擺動時長:在一個步行周期中始終與地無接觸的階段。
支撐時相:支撐時長所占步態周期的百分數(cycle%)作為單位來表達。
單支撐時相:通常指一足著地到該足離地的過程。
擺動時相:擺動時長所占步態周期的百分數(cycle%)作為單位來表達。
制動時長:從該足開始接觸時刻到該足與地面最大接觸面積時刻所需的時長。
制動指數:制動時長 / 支撐時長。
推進時長:從該足與地面最大接觸面積時刻到該足離地時刻所需的時長。
推進指數:推進時長 / 支撐時長。
同源協調性:被觀測足爪 (RH or LH) 的擺動時間或支撐時間與對照足爪 (LH or LF) 的步行周期的比值。
同側協調性:被觀測足爪 (RH or LH) 的擺動時間或支撐時間與對照足爪 (RF or LF) 的步行周期的比值。
對側協調性:被觀測足爪 (RH or LH) 的擺動時間或支撐時間與對照足爪 (LF or RF) 的步行周期的比值。
步幅:動物在一個步行周期中,同一前肢或后肢連續兩個最大腳印橫坐標中點之間的距離。
左側步基:動物在一個步行周期中,左前肢連續兩個最大腳印橫坐標中點與左后肢連續兩個最大腳印橫坐標中點
之間的距離。
右側步基:同上。
前肢步寬:在行走中左、右兩足間的距離稱為步寬,通常以足爪中點為測量參考點。
后肢步寬:同上。
足跡最大面積:t 為足爪接觸地面的最大面積時刻,最大面積計算公式為:
足跡平均面積:每幀圖像足跡面積之和 / 總幀數。
擺動速度:步長 / 擺動時間。
瞬時速度:每只爪子的步長 / 步行周期。
平均速度:在一次行走過程中瞬時速度的平均值。
總速度:在一次行走過程中,步長的總和 / 步長周期的總和。
-
儀器
+關注
關注
1文章
3914瀏覽量
50769
發布評論請先 登錄

六足仿生機器人地形自適應步態規劃研究
訊維AI視頻行為分析系統:打造全方位智能安防解決方案

AI視頻行為分析系統:重塑安全監控的智能化未來!



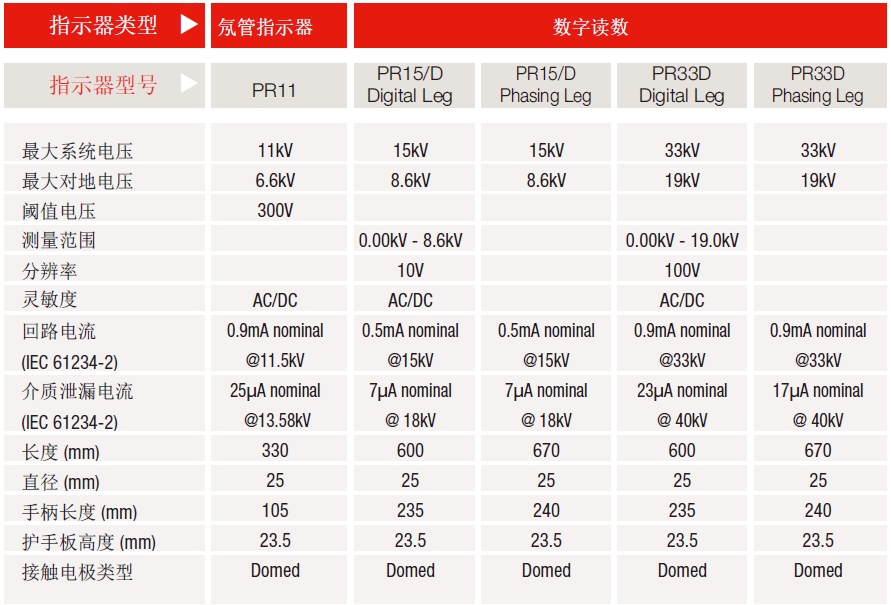
高壓核相器/相位比較設備:PR11、PR15D/PR33D
步態監測方案首次亮相ICMD秋季展,促進個體化步態矯正朝高水平進階
行為分析智能監測攝像機

簡儀高性能平臺在小鼠腦電波實驗中的應用

加油站視頻監控行為識別分析系統 OpenCV

AI行為識別視頻監控系統 Python






 工商網監
工商網監
評論