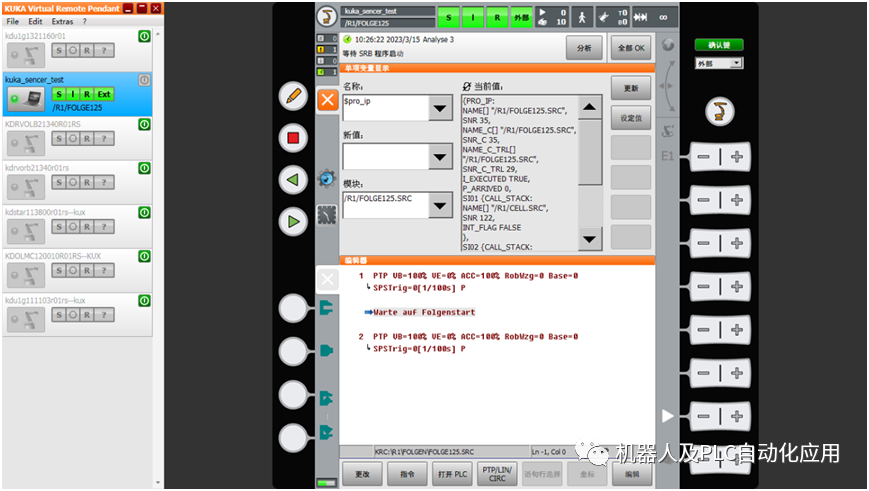
 讀取機器人程序中的變量
讀取機器人程序中的變量
其中包含引用解釋器的進程指針的數據. 變量包含接下來將在解釋器中執行的塊的數據。 根據特定的解釋器,訪問數據的方式如下: 讀取機器人程序中的變量是指機器人在解釋器中的狀態。 在提交程序中讀取變量是指關聯的提交解釋器的狀態。 通過變量校正函數讀取/寫入變量是指$INTERPRETER的當前值。 $INTERPRETER的可能值取決于機器人控制器所處的提交模式。 機器人控制器處于單次提交模式(默認操作模式): 0:提交解釋器 1:機器人翻譯 多提交模式下的機器人控制器(僅適用于KUKA系統軟件8.3及更高版本): 1:機器人解釋器 2:系統提交解釋器 3:擴展提交解釋器1 4:擴展提交解釋器2 … 9:擴展提交解釋器7 在提交程序中訪問P_Arrived: $PRO_IP在提交解釋器中包含以下初始化組件: ? $PRO_IP.SNR ? $PRO_IP.Name[] ? $PRO_IP.I_Executed 組件$PRO_IP.P_Arrived未在子模塊解釋器中初始化。 在提交程序中讀取組件P_Arrived會觸發錯誤消息{$variable}值無效。 為了能夠讀取提交程序中的機器人解釋器組件P_Arrived,必須使用變量$PRO_IP1: IF ($PRO_IP1.P_Arrived == 1) THEN … $PRO_IP= Process data STRUC Pro_Ip CHAR name[32], INT snr, CHAR name_c[32], INT snr_c, BOOL i_executed, INT p_arrived, CHAR p_name[24], CALL_STACK S101, S102, …S110
| name[] | 解釋器在其中進行預運行的模塊的名稱 |
| snr | 解釋器在其中預先運行的塊的編號(通常不等于程序) |
| name_c[] | 插值器所在的模塊的名稱 |
| snr_c | 插值器所在的塊的編號 |
| i_executed | 指示解釋器是否已經執行了塊(=TRUE) |
| p_arrived | 指示機器人所在路徑上的點(僅與運動指令相關) ? 0:到達運動的目標或輔助點 ? 1:未達到目標點(機器人在路徑上的某個位置) ? 2:不相關 ? 3:到達CIRC或SCIRC行動的輔助點 ? 4:在起點和輔助點之間的路段上移動 |
| p_name[] | 機器人所在的目標或輔助點的名稱或集合 |
| S101 … S110 | 解釋器所在的調用方堆棧 |
 在5.x中,對$PRO_IP的整體結構的訪問與對組件的訪問給出了不同的結果。 在下面的例子中,mPArrived1和mPArrived2有不同的結果。該示例說明了Submit程序: ?1? Decl PRO_IO mProIP ?2? Decl INT mPArrived1, mPArrived2 ?3? mProIP=$Pro_IP ?4? mPArrived1=mProIP.P_Arrived 從Submit解釋器讀取P_Arrived(始終為0) ?5? mPArrived2=$Pro_IP.P_Arrived 從機器人解釋器讀取P_Arrived 從機器人解釋器讀取P_Arrived在8.x中,訪問$PRO_IP的整體結構和訪問組件具有相同的結果。 顯式訪問解釋器狀態: 8.x中存在以下新變量: $PRO_IP0項目 $PRO_IP0可用于訪問Submit解釋器的狀態。 $PRO_IP1項目 $PRO_IP1可用于訪問機器人解釋器的狀態。 程序可以讀取$PRO_IP0和$PRO_IP1。它們也可以使用變量校正函數來編寫。 隱式訪問解釋器狀態: 根據具體的解釋器,$PRO_IP的訪問權限如下: 讀取機器人程序中的變量是指機器人解釋器的狀態。 讀取Submit程序中的變量是指Submit解釋器的狀態。 通過變量校正函數讀取/寫入變量是指$INTERPRETER的當前值。 $INTERPRETER=0:選擇了Submit解釋器。 $INTERPRETER=1:選擇機器人解釋器。 ? 在提交程序中訪問P_Arrived: $PRO_IP在Submit解釋器中包含以下初始化組件: $PRO_IP.SNR項目 $PRO_IP名稱[] $PRO_IP.I_已執行 這意味著:P_Arrived未在Submit解釋器中初始化。在提交程序中讀取P_Arrived會觸發錯誤消息1422“…值無效”。 為了能夠讀取Submit程序中的機器人解釋器組件P_Arrived,必須按如下方式修改指令: ? IF ($PRO_IP 1 .P_Arrived == 1) THEN … .x到8.x(在5.x中,這是:IF($PRO_IP.P_Arrived==1)THEN…)
在5.x中,對$PRO_IP的整體結構的訪問與對組件的訪問給出了不同的結果。 在下面的例子中,mPArrived1和mPArrived2有不同的結果。該示例說明了Submit程序: ?1? Decl PRO_IO mProIP ?2? Decl INT mPArrived1, mPArrived2 ?3? mProIP=$Pro_IP ?4? mPArrived1=mProIP.P_Arrived 從Submit解釋器讀取P_Arrived(始終為0) ?5? mPArrived2=$Pro_IP.P_Arrived 從機器人解釋器讀取P_Arrived 從機器人解釋器讀取P_Arrived在8.x中,訪問$PRO_IP的整體結構和訪問組件具有相同的結果。 顯式訪問解釋器狀態: 8.x中存在以下新變量: $PRO_IP0項目 $PRO_IP0可用于訪問Submit解釋器的狀態。 $PRO_IP1項目 $PRO_IP1可用于訪問機器人解釋器的狀態。 程序可以讀取$PRO_IP0和$PRO_IP1。它們也可以使用變量校正函數來編寫。 隱式訪問解釋器狀態: 根據具體的解釋器,$PRO_IP的訪問權限如下: 讀取機器人程序中的變量是指機器人解釋器的狀態。 讀取Submit程序中的變量是指Submit解釋器的狀態。 通過變量校正函數讀取/寫入變量是指$INTERPRETER的當前值。 $INTERPRETER=0:選擇了Submit解釋器。 $INTERPRETER=1:選擇機器人解釋器。 ? 在提交程序中訪問P_Arrived: $PRO_IP在Submit解釋器中包含以下初始化組件: $PRO_IP.SNR項目 $PRO_IP名稱[] $PRO_IP.I_已執行 這意味著:P_Arrived未在Submit解釋器中初始化。在提交程序中讀取P_Arrived會觸發錯誤消息1422“…值無效”。 為了能夠讀取Submit程序中的機器人解釋器組件P_Arrived,必須按如下方式修改指令: ? IF ($PRO_IP 1 .P_Arrived == 1) THEN … .x到8.x(在5.x中,這是:IF($PRO_IP.P_Arrived==1)THEN…)
-
控制器
+關注
關注
113文章
16775瀏覽量
181861 -
機器人
+關注
關注
212文章
29136瀏覽量
210562 -
程序
+關注
關注
117文章
3815瀏覽量
81997
原文標題:KUKA 的$PRO_IP變量V5.28
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論