 采用SFDR優化的混合波束成形發射校準
采用SFDR優化的混合波束成形發射校準
Peter Delos, Sam Ringwood, 和 Michael Jones
相控陣校準工作通常側重于優化目標基波信號。本文介紹了一種在已知所需信號的相位校準后進一步提高雜散性能的方法。使用這種方法,我們將評估由四個32元素子陣列組成的8元素混合波束成形系統上的傳輸雜散信號。所示測量結果顯示性能改進超過 25 dB。為了擴展到更大的系統,我們考慮了何時適用消除方法與確保雜散信號不相關的方法。
介紹
對于未來的相控陣,行業對軟件定義天線有著重要的追求。這帶來了對全數字相控陣的強烈需求,以最大限度地提高天線方向圖可編程性。在實踐中,特別是隨著頻率的增加,封裝、功耗和數字處理方面的挑戰迫使數字通道數量減少。混合波束成形提供了實現工程師通常需要的數字信道密度緩解,因此在未來一段時間內可能會成為一種實用的選擇。
在大型數字波束成形天線中,無論混合波束成形與數字波束成形的架構如何,通過組合來自分布式波形發生器和接收器的信號的波束成形過程來提高動態范圍是非常可取的。如果相關的誤差項不相關,則可以在噪聲和雜散性能方面獲得10logN的動態范圍改進。在這種情況下,N 是波形發生器或接收器通道的數量。噪聲本質上是一個隨機過程,因此非常適合跟蹤相關和不相關的噪聲源。然而,強制雜散信號不相關不太明顯。因此,任何可能迫使雜散信號不相關的設計方法對相控陣系統設計人員來說都是有價值的。
在相控陣中強制雜散去相關的各種方法已經為人所知。我們最早的出版物可追溯到2002年,2其中描述了確保接收器雜散信號不相關的通用方法。在該方法中,信號首先以已知方式在兩個接收器上修改。然后信號被接收器的非線性分量失真。在接收器輸出端,接收器中先前引入的修改是反轉的。預期的信號變得相干或相關,但扭曲的項不相關。Howard(2002)中實現的修改方法是將每個本地振蕩器(LO)合成器設置為不同的頻率,然后通過在數字處理中對數控振蕩器(NCO)進行數字調諧來校正修改。多年來還發表了其他幾種方法。3,4最近證明了抵消LO頻率的方法,并在基于商用集成收發器的設計的測試結果中證明是有效的。5,6最近,已經公布了有關分布式直接采樣RF數據轉換器的雜散改進的數據。7,8
在這項工作中,我們表明,在信道匹配良好且特定雜散頻率在通道之間固有相關的情況下,混合波束成形架構有助于提供一種方法,不僅可以強制雜散信號不相關,還可以通過消除方法得到更顯著的改進。我們還表明,消除可以嵌入到校準中,作為陣列中相位校準之后的第二步。
為了說明該方法的價值,我們介紹了圖1。在這里,測量顯示僅四個數字子陣列的SFDR改進>25 dB。請注意,初始主導雜散明顯低于其他雜散信號。由于不相關的噪聲或雜散信號,僅四個通道的這種幅度的雜散改善遠遠超過標準的10logN改善,并且已經證明了雜散信號的消除。
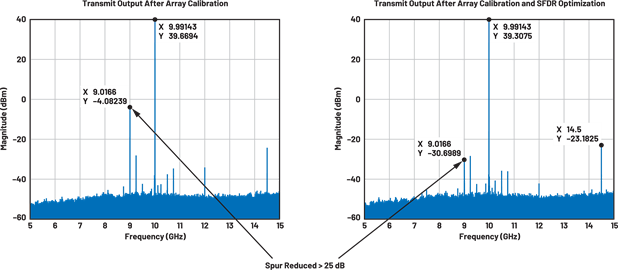
圖1.發射輸出的頻譜。在相控陣校準之后顯示在左側,而在附加SFDR優化校準之后顯示在右側。
組合噪聲電壓
當信號在自由空間或RF組合中組合時,每個信號的噪聲增加為

C 范圍 –1 至 +1
–1 -> 取消
0 -> 不相關
+1 -> 完全相關
雜散可以視為噪聲電壓
對于相控陣,RF性能的一般目標是相關系數為0。這導致陣列級動態范圍改進了 10logN,其中 N 是通道數。在某些特定情況下,c可以是負數并且可以創建取消,在這項工作中,我們演示了一個可以應用取消的示例。
考慮是否發現特定的混頻雜散跨通道相關。在這種情況下,相關意味著混頻雜散信號在幅度和相位上跨通道匹配。如果存在這種情況,則混合波束成形架構固有地提供鉤子,通過在直接數字頻率合成器(DDS)和模擬波束成形集成電路(BFIC)移相器上找到最佳的相位旋轉來消除雜散。
硬件演示器說明
已經開發出32單元混合波束成形原型平臺,9詳細的信號鏈如圖2所示。
前端由 32 個發送/接收模塊和 8 個模擬 BFIC 組成。兩個 BFIC 輸入/輸出組合產生四個 4 元素子陣列。四個子陣列連接到一個 4 通道微波上變頻器/下變頻器。然后,4通道微波上變頻器/下變頻器連接到包含四個模數轉換器(ADC)和四個數模轉換器(DAC)的數字化儀IC。ADC的采樣速率為12 GSPS,而DAC的采樣速率為<> GSPS。
表征的微波頻率為8 GHz至12 GHz。LO設置為以4.5 GHz為中心的固定中頻(IF)的高邊LO。在此IF頻率下,ADC在第三個奈奎斯特區采樣。
商用FPGA板用于數據采集。已經開發了MATLAB計算機控制接口,可以在實際硬件中快速表征波形。數據分析在 MATLAB 中進行后處理。?
強制雜散相位旋轉
考慮圖1所示的雜散電平。具體的雜散和以dBc為單位的雜散電平如表1所示。顯示了每個子陣列的雜散電平,初始校準后的整個陣列以及額外SFDR校準后的整個陣列。
| 雜散積 | 子陣列 1 (dBc) | 子陣列 2 (dBc) | 子陣列 3 (dBc) | 子陣列 4 (dBc) | 全陣列 (dBc) 后陣列校準 | 全陣列 (dBc) SFDR 優化后 |
| 2中頻 | –43.6 | –46.1 | –43.8 | –41.7 | –43.7 | –70 |
| LO 泄漏 | –50.1 | –55.4 | –58.1 | –52.2 | –64.1 | –62.5 |
| 數字轉換器時鐘 | –68.7 | –66.8 | –69.2 | –65.1 | –71.9 | –81.7 |
|
軌道 1 (9.24 GHz) |
–67.1 | –68.2 | –64.3 | –65.5 | –67.9 | –67.9 |
|
軌道 2 (10.5 GHz) |
–72.5 | 73.3 | –72.9 | –74.8 | –77.3 | –75.3 |
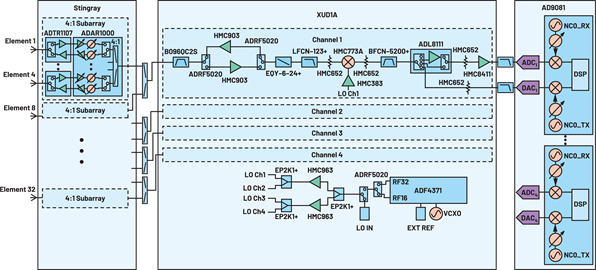
圖2.X波段混合波束成形演示框圖。
請注意,在此數據中,2IF 雜散在每個子陣列中處于同一級別。全陣列校準后,組合數據顯示2IF雜散處于相同dBc電平,沒有改善。這表明2IF雜散在通道之間是相關的。這就帶來了一個問題,“如果雜散是相關的,那么馬刺可以被迫不相關嗎?第二個問題變成了,“如果馬刺如此相關,那么他們是否可以被迫被取消?
圖3示出了在保持基波RF信號相位的同時可視化旋轉2IF雜散相位的方法。
首先,假設基波和2IF雜散都在0°處同相對齊。
如果中頻頻率的相位旋轉相位θ,則2IF頻率將以該速率的兩倍或2θ旋轉。這可以通過NCO或基帶IQ數據的DAC輸出相位來控制。
此架構中使用了高端LO。這會導致RF相位以與IF相位相反的方向旋轉,從而使RF相位旋轉–θ。這意味著子陣列的模擬BFIC移相器都需要旋轉θ以重新對齊基頻。模擬移相器的這種偏移導致2IF雜散上的額外θ相移,總相移為3θ。
圖3顯示了2IF雜散可以旋轉的原理。期望的結果是在每個子陣列上找到適當的旋轉,以便在發射輸出端消除2IF雜散。我們將展示混合波束成形相控陣架構提供了DDS頻率生成時的IF相位控制和通過子陣列模擬BFIC的RF相位控制的必要組合,以實現內置機制在子陣列之間旋轉2IF雜散的相對相位。
發射校準
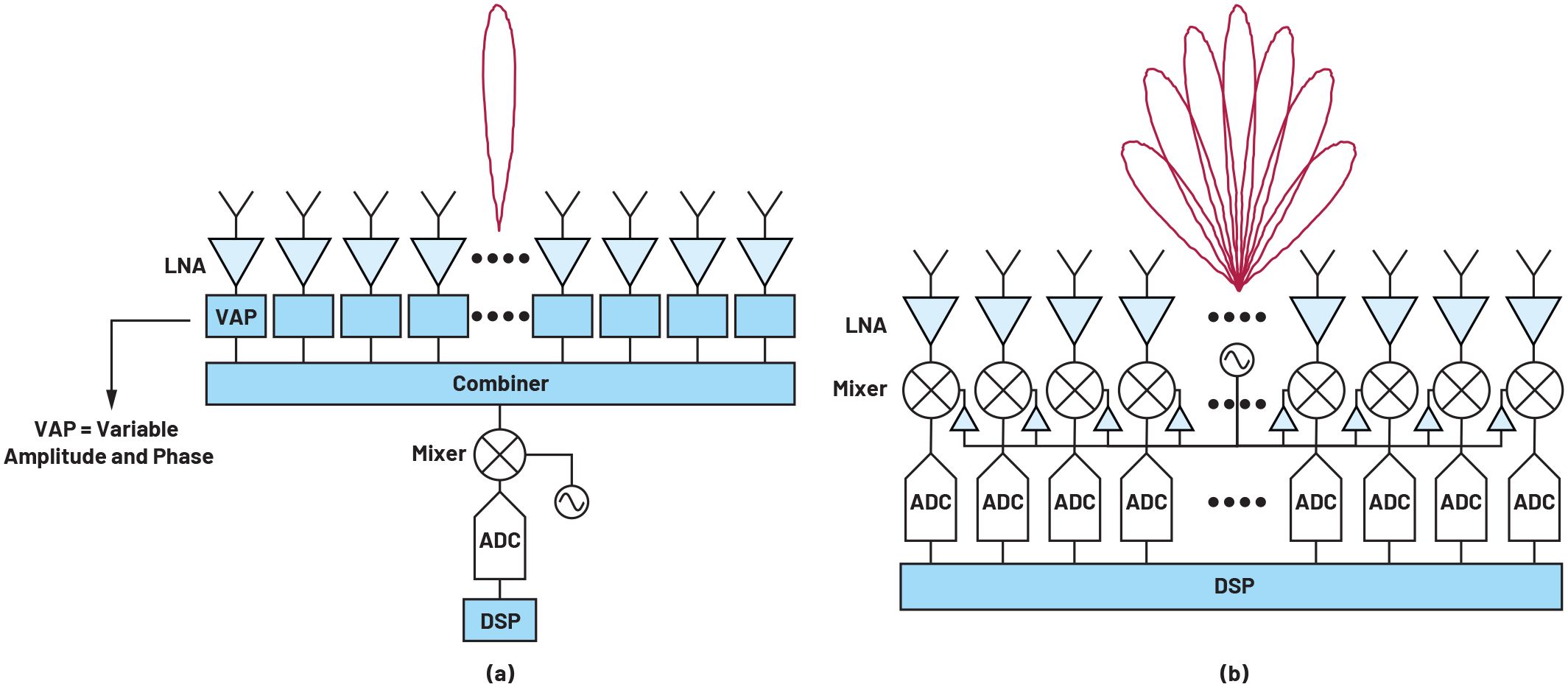
圖4顯示了通用的混合波束成形架構,并在Delos研究中進行了進一步描述。8圖4還突出顯示了天線校準中使用的可編程幅度和相位控制。
本文討論了用于對齊硬件幅度和相位的校準步驟。
振幅校準
測量每個通道的信號幅度,并將其均衡到功率最低的通道。為了同時測量各個子陣列,頻率間隔開,以便從單個頻譜分析儀測量中測量每個子陣列。
相位校準
為了實現跨子陣列的同時捕獲,采用了時間交錯脈沖校準方法。脈沖是每個子陣列的時間交錯。脈沖連續波(CW)信號被施加到頻譜分析儀設置中,以卸載同相(I)和正交相位(Q)數據。頻譜分析儀在 IQ 數據模式下能夠提供 160 MHz 帶寬。發射中心頻率與頻譜分析儀中心頻率偏移 8 MHz,以觀察 IQ 數據中的完整周期。根據這些數據,子陣列中的相位是匹配的。此概念如圖 5 所示。
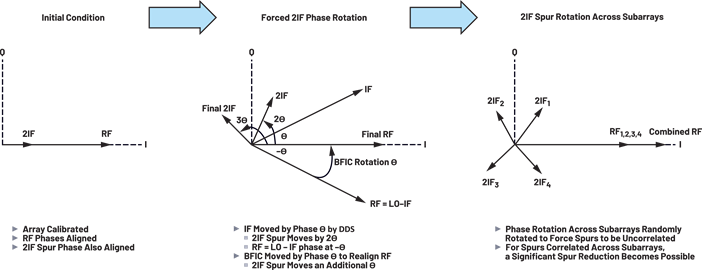
圖3.強制2IF雜散相位旋轉。
實現的相位對齊步驟如下:
第 1 步:在所有四個子陣列中對齊元素 1。
這是通過單個數據捕獲實現的,使用時間交錯脈沖對每個子陣列啟用元素 1 并禁用其他元素。
步驟 2:對齊子數組 2、8 和 2 中的元素 3 到 4。
這是通過七個脈沖數據采集來實現的。在每個數據捕獲中,第一個脈沖來自子陣列 1 元素 1,其余三個脈沖用于子陣列 2、3 和 4,每個數據捕獲通過元素 2 到 8。
步驟 3:對齊子陣列 2 中的元素 8 到 1。
這是通過七個2脈沖數據捕獲來實現的。在每個數據捕獲中,第二個脈沖是子陣列 2 元素 1,第一個脈沖步進子陣列 1 元件 2 到 8。
SFDR 優化
2IF雜散相位旋轉的原理在強制雜散相位旋轉部分進行了概述。接下來,我們將其映射到方程表示中,以便更輕松地轉換為用于校準的軟件腳本。
首先,我們介紹使用的符號:
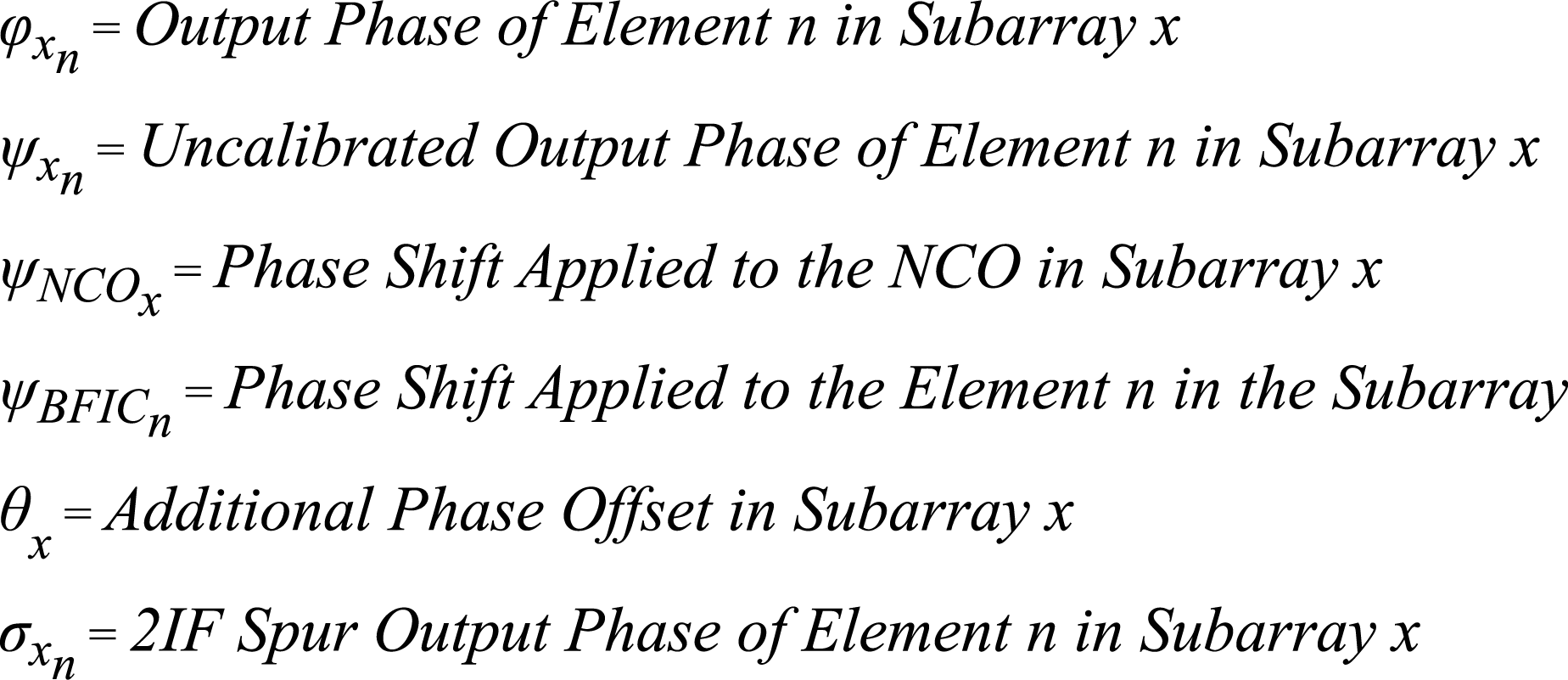
發射校準中描述的陣列校準后每個元件的輸出相位可以寫為:

引入額外的SFDR相位優化項,在陣列校準和SFDR優化步驟之后,每個元件的所需信號相位可以寫成:

同樣,此SFDR相位優化步驟導致2IF雜散的每個元件的輸出相位,可寫為:


圖4.一種通用的混合波束成形架構,概述了用于天線校準的幅度和相位可編程控制。
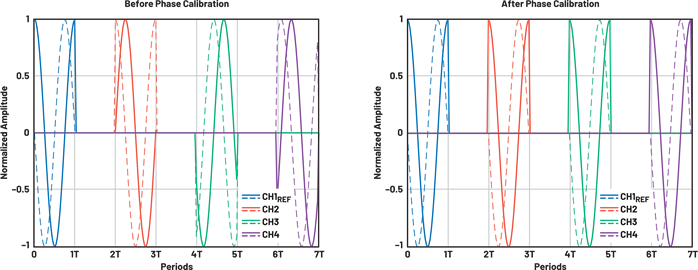
圖5.時間交錯脈沖校準用于確定通道間的相位誤差。
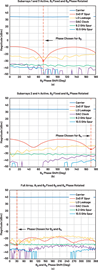
圖6.(a) SFDR 優化步驟 1:子陣列 1 和 3 處于活動狀態:θ1= 0, i3從0°旋轉到180°;(b) SFDR 優化步驟 2:子陣列 2 和 4 處于活動狀態:θ2= 0, i4從0°旋轉到180°;(c) SFDR 優化步驟 3:所有子陣列都處于活動狀態:θ3和 θ4固定在從步驟 1 和 2 中選擇的相位,θ2和 θ4從 0° 旋轉到 360°。
SFDR 優化分三個步驟完成,如圖 6 所示。第一步包括激活陣列的一半,并將一個子陣列的模擬和數字相位從0°旋轉到180°,同時將另一個相位固定在0°。在這種情況下,子數組 1 和 3 處于活動狀態,而 θ1固定在 0° 和 θ3在關注 2IF 雜散大小的同時旋轉。圖6a顯示了θ3在此限度下,2IF雜散最小值。優化步驟 2 的執行方式與步驟 1 類似,但不同的子陣列處于活動狀態。對于步驟 2,子數組 2 和 4 處于活動狀態,而 θ2固定在 0° 和 θ4被旋轉。θ 的確定相位偏移4是當2IF雜散幅度處于最小值時,如圖6b所示。
最后,在所有子陣列處于活動狀態時應用步驟 1 和 2 中的優化相位偏移,并在兩個子陣列上執行最終相位旋轉。圖6c顯示了θ1和 θ3保持在固定值,而 θ2和 θ4被旋轉。同樣,最佳相位偏移是2IF雜散幅度的相應最小值。值得澄清最終的θ4值是在步驟 2 和 3 中選擇的相位偏移的總和。
跨帶寬驗證
每當實施取消時,一個問題是驗證跨帶寬和其他條件的取消保留。在所使用的硬件演示器中,需要考慮三個方面:基帶IQ數據到數字化儀IC的調制,DAC數字上變頻器中NCO頻率的變化以及LO頻率的變化。這些結果如圖 7 所示。IQ 數據在 100 MHz 范圍內變化,NCO 頻率在 500 MHz 范圍內變化,LO 在 2 GHz 范圍內變化。在所有情況下,與未實施SFDR優化相比,2IF雜散保持顯著降低的水平。
雜散取消與強制雜散不相關
關于雜散消除與更簡單的去相關方法以及對大型相控陣系統的適用性的觀點值得討論。
在此硬件的情況下,我們演示了一種雜散消除方法。如果關注的雜散顯示在整個陣列中相關,則可以將其應用于單個顯性雜散。如果將數組分區為較小的子數組組以進行 SFDR 優化,或者我們的方法可以通過將數組拆分為象限來按原樣使用,則可以將我們描述的優化擴展到更大的數組。
有許多支線很難取消。在這種情況下,確保雜散信號不相關的10logN改進更為實用。對于許多幅度不匹配的雜散或雜散的情況,可以在整個陣列中使用優化步驟期間的SFDR相位隨機化,以確保雜散信號不相關,并且仍然可以通過這種相對簡單的軟件級實現提供改進。
未來工作
對于相控陣,尚未討論的考慮因素是SFDR在遠離主傳輸光束時的影響。在校準和SFDR優化步驟之后,當主信號全部相干或朝向主光束方向時,將應用雜散減少。在偏角處,主載體和雜散都存在相位旋轉。用于減少主光束方向上的SFDR的SFDR優化可能導致雜散在其他角度方向上相位對齊。將評估這一效果,作為這項工作的后續行動。
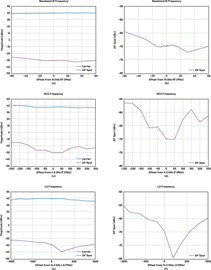
圖7.顯示了三個可編程選項的頻率掃描結果:DDS頻率、NCO頻率和LO頻率;(a) DDS頻率掃描的載波幅度和2IF雜散幅度;(b) DDS頻率掃描的2IF雜散dBc電平;(c) NCO頻率掃描的載波幅度和2IF雜散幅度;(d) 用于NCO頻率掃描的2IF雜散dBc電平;(e) LO頻率掃描的載波幅度和2IF雜散幅度;(f) LO頻率掃描的2IF雜散dBc電平。
結論
混合波束成形相控陣架構具有天然的鉤子,可以迫使混雜雜散不相關。該架構在波束成形IC的模擬移相器中提供相移控制,在數字域中提供相位控制,可通過基帶數據或NCO相位調整實現。這些兩相控制元件的組合直接在架構中提供了嵌入式相位控制,作為相控陣校準第一級之后的第二步,可以利用這些控制來優化SFDR性能。我們已經在商用硬件上演示了這種能力,描述了優化步驟,并提供了測量結果。
審核編輯:郭婷
-
嵌入式
+關注
關注
5120文章
19409瀏覽量
312380 -
dac
+關注
關注
43文章
2334瀏覽量
192620 -
NCO
+關注
關注
0文章
22瀏覽量
24804
發布評論請先 登錄
相關推薦
毫米波波束成形和天線設計
雷達模擬波束成形和數字波束成形的區別

一種波束成形系統的相位測量方法介紹
【模擬對話】相控陣波束成形IC簡化天線設計
MIMO信道多用戶塊傳輸SCFDE系統的聯合波束成形
無線網絡中功率分配的安全波束成形
波束成形的類型及其在RF PCB中的用途
毫米波波束成形和天線技術的實例說明
多波束相控陣接收機混合波束成形功率優勢的定量分析
混合波束成形接收機動態范圍理論實踐
如何實現毫米波波束成形和大規模MiMo?







 工商網監
工商網監
評論