") Proteus教程:步進(jìn)電機(jī)
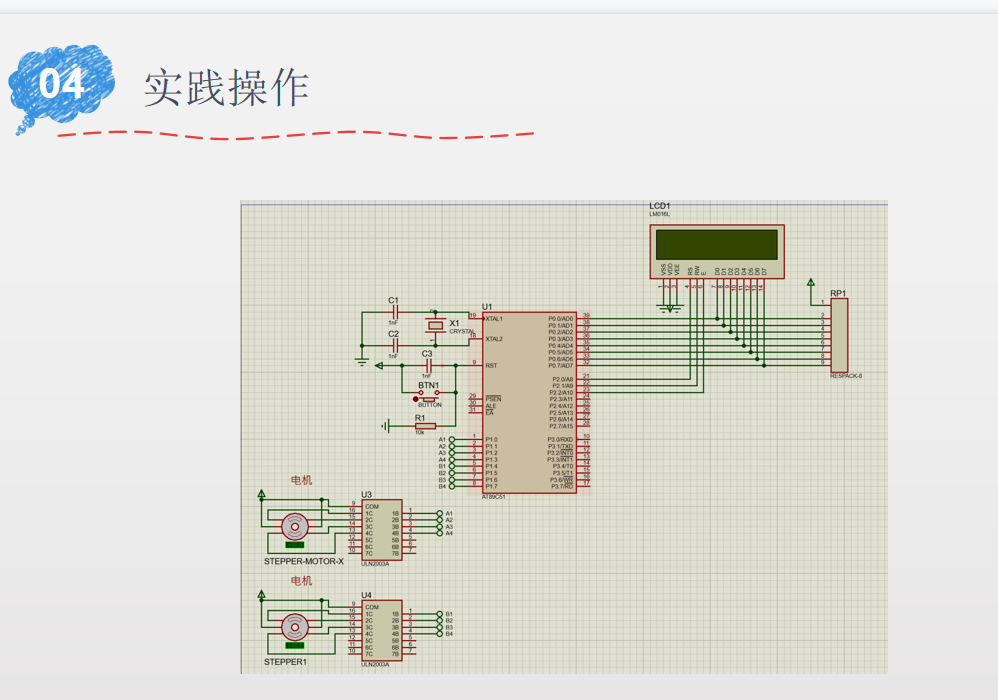
Proteus教程:步進(jìn)電機(jī)
視頻教程:https://www.bilibili.com/video/BV1fF411K79x
#include
#include
#define uchar unsigned char
#define uint unsigned int
#define LCD1602_DATAPINS P0
sbit LCD1602_E=P2^2;
sbit LCD1602_RW=P2^1;
sbit LCD1602_RS=P2^0;
sbit MA_1 = P1^0;
sbit MA_2 = P1^1;
sbit MA_3 = P1^2;
sbit MA_4 = P1^3;
sbit MB_1 = P1^4;
sbit MB_2 = P1^5;
sbit MB_3 = P1^6;
sbit MB_4 = P1^7;
uchar flag;
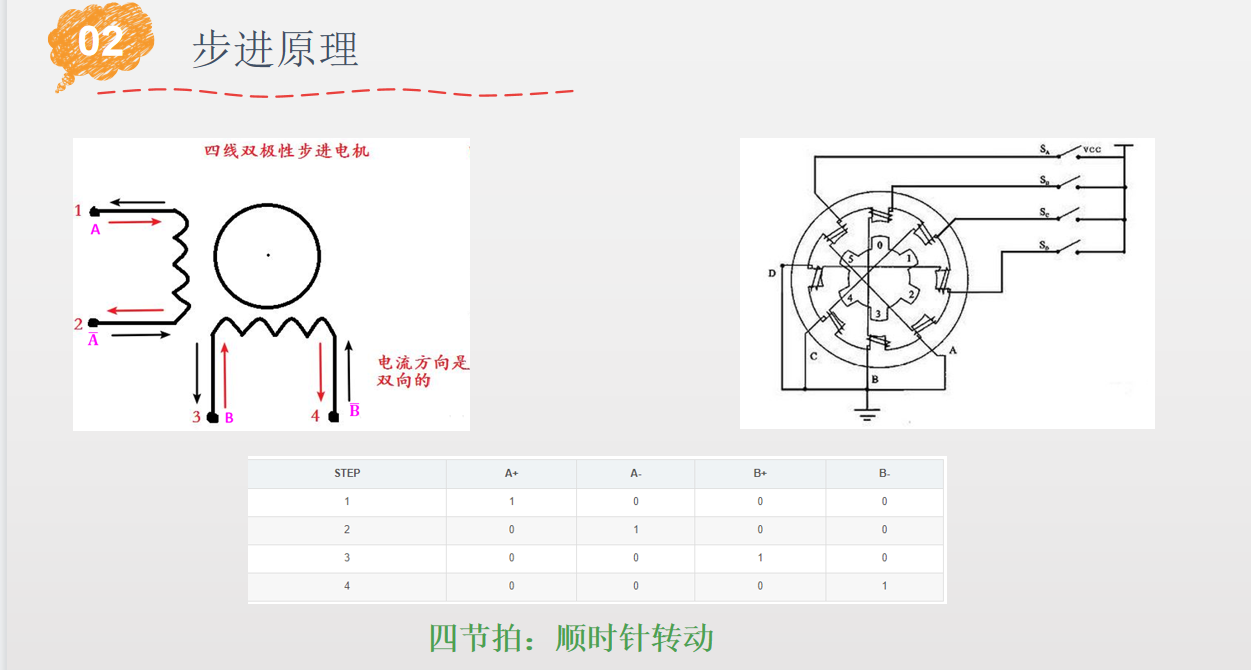
unsigned char code M_A[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9}; //X反轉(zhuǎn)順序
unsigned char code M_B[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1}; //X正轉(zhuǎn)順序
/*******************************************************************************
* 函 數(shù) 名 : Delay
* 函數(shù)功能 : 延時
*******************************************************************************/
void DDelay(unsigned int t)
{
unsigned int k;
while(t--)
{
for(k=0; k0; c--)
{
for (b=199;b>0;b--)
{
for(a=1;a>0;a--);
}
}
}
/*******************************************************************************
* 函 數(shù) 名 : LcdWriteCom
* 函數(shù)功能 : 向LCD寫入一個字節(jié)的命令
* 輸 入 : com
* 輸 出 : 無
*******************************************************************************/
void LcdWriteCom(uchar com) //寫入命令
{
LCD1602_E = 0; //使能
LCD1602_RS = 0; //選擇發(fā)送命令
LCD1602_RW = 0; //選擇寫入
LCD1602_DATAPINS = com; //放入命令
Lcd1602_Delay1ms(1); //等待數(shù)據(jù)穩(wěn)定
LCD1602_E = 1; //寫入時序
Lcd1602_Delay1ms(5); //保持時間
LCD1602_E = 0;
}
/*******************************************************************************
* 函 數(shù) 名 : LcdWriteData
* 函數(shù)功能 : 向LCD寫入一個字節(jié)的數(shù)據(jù)
* 輸 入 : dat
* 輸 出 : 無
*******************************************************************************/
void LcdWriteData(uchar dat) //寫入數(shù)據(jù)
{
LCD1602_E = 0; //使能清零
LCD1602_RS = 1; //選擇輸入數(shù)據(jù)
LCD1602_RW = 0; //選擇寫入
LCD1602_DATAPINS = dat; //寫入數(shù)據(jù)
Lcd1602_Delay1ms(1);
LCD1602_E = 1; //寫入時序
Lcd1602_Delay1ms(5); //保持時間
LCD1602_E = 0;
}
/*******************************************************************************
* 函 數(shù) 名 : LcdInit()
* 函數(shù)功能 : 初始化LCD屏
* 輸 入 : 無
* 輸 出 : 無
*******************************************************************************/
void LcdInit() //LCD初始化子程序
{
LcdWriteCom(0x38); //開顯示
LcdWriteCom(0x0c); //開顯示不顯示光標(biāo)
LcdWriteCom(0x06); //寫一個指針加1
LcdWriteCom(0x01); //清屏
LcdWriteCom(0x80); //設(shè)置數(shù)據(jù)指針起點
}
//按指定位置顯示一個字符
void DisplayOneChar(unsigned char X, unsigned char Y, unsigned char DData)
{
Y &= 0x1;
X &= 0xF; //限制X不能大于15,Y不能大于1
if (Y) X |= 0x40; //當(dāng)要顯示第二行時地址碼+0x40;
X |= 0x80; // 算出指令碼
LcdWriteCom(X); //這里不檢測忙信號,發(fā)送地址碼
LcdWriteData(DData);
}
//按指定位置顯示一串字符
void DisplayListChar(unsigned char X, unsigned char Y, unsigned char code *DData)
{
unsigned char ListLength;
ListLength = 0;
Y &= 0x1;
X &= 0xF; //限制X不能大于15,Y不能大于1
while (DData[ListLength]>=0x20) //若到達(dá)字串尾則退出
{
if (X <= 0xF) //X坐標(biāo)應(yīng)小于0xF
{
DisplayOneChar(X, Y, DData[ListLength]); //顯示單個字符
ListLength++;
X++;
}
}
}
//unsigned char code M_A[8]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9}; //X反轉(zhuǎn)順序
//unsigned char code M_B[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1}; //X正轉(zhuǎn)順序
void Motor_A1()
{
DDelay(3);
MA_1 = 0;
MA_2 = 0;
MA_3 = 0;
MA_4 = 1;
DDelay(3);
MA_1 = 0;
MA_2 = 0;
MA_3 = 1;
MA_4 = 1;
DDelay(3);
MA_1 = 0;
MA_2 = 0;
MA_3 = 1;
MA_4 = 0;
DDelay(3);
MA_1 = 0;
MA_2 = 1;
MA_3 = 1;
MA_4 = 0;
DDelay(3);
MA_1 = 0;
MA_2 = 1;
MA_3 = 0;
MA_4 = 0;
DDelay(3);
MA_1 = 1;
MA_2 = 1;
MA_3 = 0;
MA_4 = 0;
DDelay(3);
MA_1 = 1;
MA_2 = 0;
MA_3 = 0;
MA_4 = 0;
DDelay(3);
MA_1 = 1;
MA_2 = 0;
MA_3 = 0;
MA_4 = 1;
}
//unsigned char code M_B[8]={0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0xf1}; //X正轉(zhuǎn)順序
void Motor_A2()
{
DDelay(3);
MA_1 = 1;
MA_2 = 0;
MA_3 = 0;
MA_4 = 1;
DDelay(3);
MA_1 = 1;
MA_2 = 0;
MA_3 = 0;
MA_4 = 0;
DDelay(3);
MA_1 = 1;
MA_2 = 1;
MA_3 = 0;
MA_4 = 0;
DDelay(3);
MA_1 = 0;
MA_2 = 1;
MA_3 = 0;
MA_4 = 0;
DDelay(3);
MA_1 = 0;
MA_2 = 1;
MA_3 = 1;
MA_4 = 0;
DDelay(3);
MA_1 = 0;
MA_2 = 0;
MA_3 = 1;
MA_4 = 0;
DDelay(3);
MA_1 = 0;
MA_2 = 0;
MA_3 = 1;
MA_4 = 1;
DDelay(3);
MA_1 = 0;
MA_2 = 0;
MA_3 = 0;
MA_4 = 1;
}
void Motor_B1()
{
DDelay(3);
MB_1 = 0;
MB_2 = 0;
MB_3 = 0;
MB_4 = 1;
DDelay(3);
MB_1 = 0;
MB_2 = 0;
MB_3 = 1;
MB_4 = 1;
DDelay(3);
MB_1 = 0;
MB_2 = 0;
MB_3 = 1;
MB_4 = 0;
DDelay(3);
MB_1 = 0;
MB_2 = 1;
MB_3 = 1;
MB_4 = 0;
DDelay(3);
MB_1 = 0;
MB_2 = 1;
MB_3 = 0;
MB_4 = 0;
DDelay(3);
MB_1 = 1;
MB_2 = 1;
MB_3 = 0;
MB_4 = 0;
DDelay(3);
MB_1 = 1;
MB_2 = 0;
MB_3 = 0;
MB_4 = 0;
DDelay(3);
MB_1 = 1;
MB_2 = 0;
MB_3 = 0;
MB_4 = 1;
}
void Motor_B2()
{
DDelay(3);
MB_1 = 1;
MB_2 = 0;
MB_3 = 0;
MB_4 = 1;
DDelay(3);
MB_1 = 1;
MB_2 = 0;
MB_3 = 0;
MB_4 = 0;
DDelay(3);
MB_1 = 1;
MB_2 = 1;
MB_3 = 0;
MB_4 = 0;
DDelay(3);
MB_1 = 0;
MB_2 = 1;
MB_3 = 0;
MB_4 = 0;
DDelay(3);
MB_1 = 0;
MB_2 = 1;
MB_3 = 1;
MB_4 = 0;
DDelay(3);
MB_1 = 0;
MB_2 = 0;
MB_3 = 1;
MB_4 = 0;
DDelay(3);
MB_1 = 0;
MB_2 = 0;
MB_3 = 1;
MB_4 = 1;
DDelay(3);
MB_1 = 0;
MB_2 = 0;
MB_3 = 0;
MB_4 = 1;
}
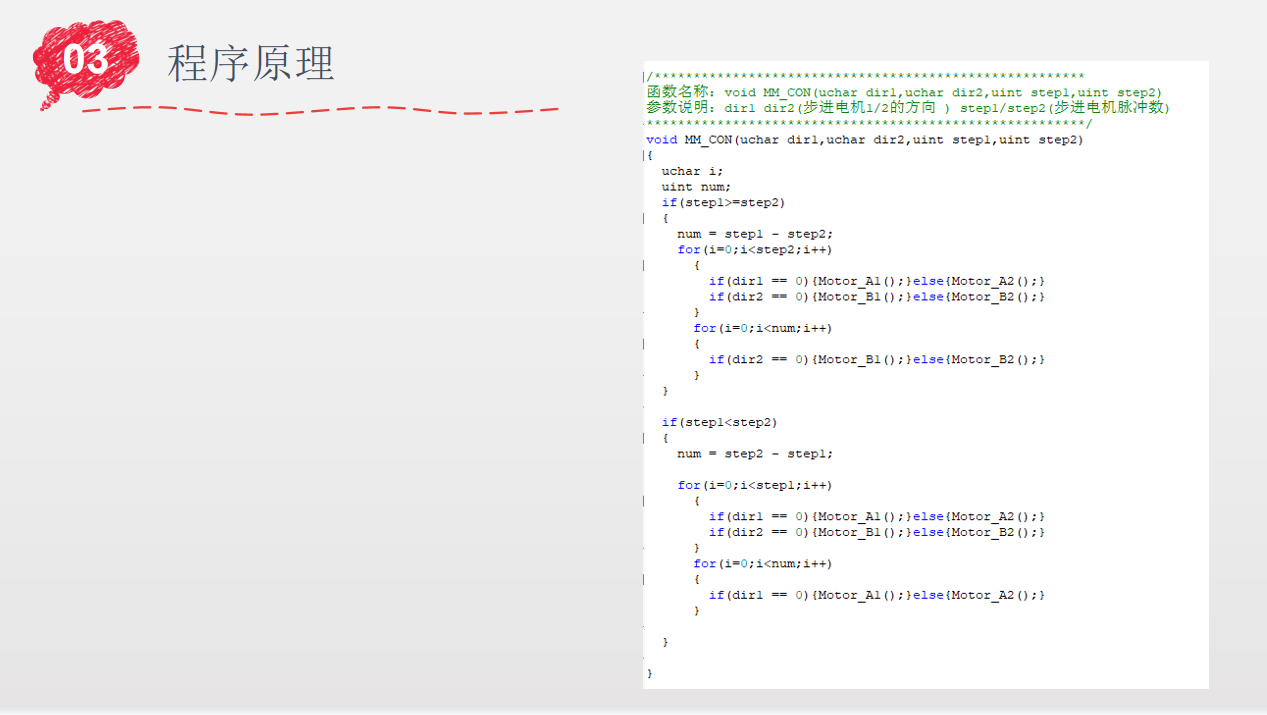
void M_Con(uchar id,uchar dir,uint step)
{
uchar i;
if(id == 0)
{
if(dir == 0)
{
for(i=0;i=step2)
{
num = step1 - step2;
for(i=0;i
審核編輯:湯梓紅
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
Proteus
+關(guān)注
關(guān)注
79文章
1692瀏覽量
107877 -
電動機(jī)
+關(guān)注
關(guān)注
75文章
4142瀏覽量
97957 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3145瀏覽量
148783
發(fā)布評論請先 登錄
相關(guān)推薦
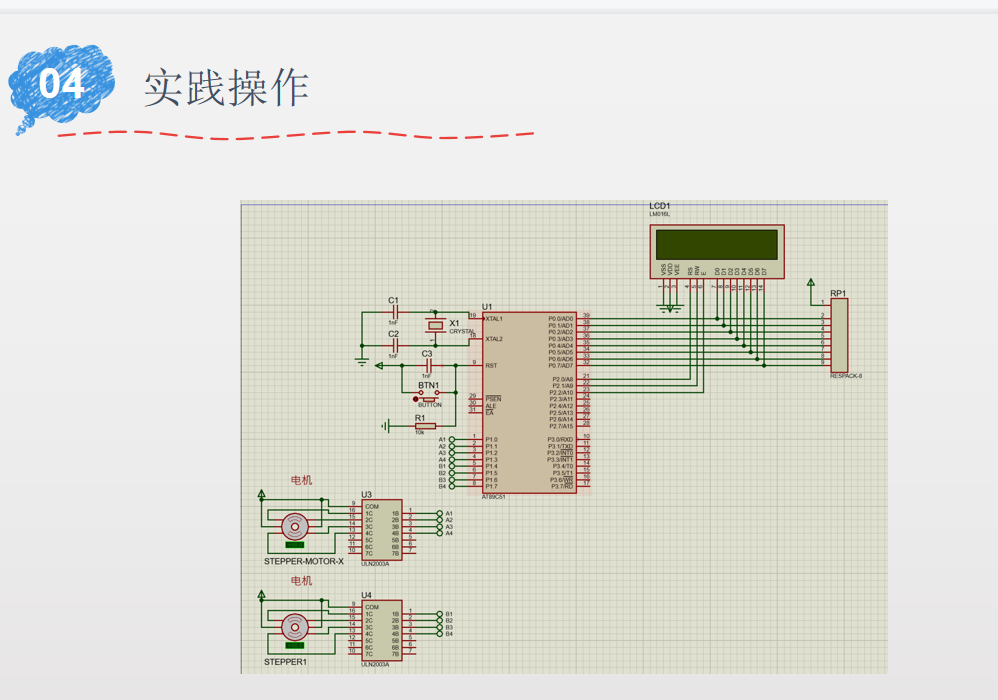
80C51+proteus步進(jìn)電機(jī)實驗
`80C51+proteus步進(jìn)電機(jī)實驗,帶LCD顯示速度,方向,狀態(tài),數(shù)碼管顯示檔位`
發(fā)表于 07-18 11:55
工程師資料:電機(jī)控制技術(shù)應(yīng)用解決方案
的設(shè)計基于單片機(jī)和proteus的步進(jìn)電機(jī)控制基于NiosII軟核處理器的步進(jìn)電機(jī)接口設(shè)計基于ATmega16單片機(jī)
發(fā)表于 12-17 14:37
PROTEUS中步進(jìn)電機(jī)參數(shù)如何設(shè)置參數(shù)?
PROTEUS中步進(jìn)電機(jī)參數(shù)如何設(shè)置參數(shù)?
發(fā)表于 03-21 09:08
Proteus仿真-步進(jìn)電機(jī) 相關(guān)資料分享
Proteus仿真-步進(jìn)電機(jī),相關(guān)推薦學(xué)習(xí)資料。
發(fā)表于 06-29 09:31
如何使用proteus軟件去仿真步進(jìn)電機(jī)?
使用proteus仿真步進(jìn)電機(jī)目錄使用proteus仿真步進(jìn)電機(jī)電路代碼遇到問題總結(jié)電路芯片使用
發(fā)表于 07-07 06:06
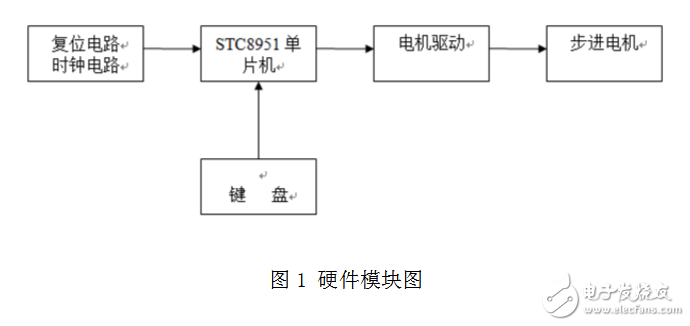
基于單片機(jī)和proteus的步進(jìn)電機(jī)控制
發(fā)表于 03-02 22:10
?132次下載
基于proteus的步進(jìn)電機(jī)仿真簡介
發(fā)表于 12-02 10:50
?15次下載
Proteus步進(jìn)電機(jī)控制資料
發(fā)表于 06-19 14:33
?9次下載
正反轉(zhuǎn)可控的步進(jìn)電機(jī)Proteus仿真
正反轉(zhuǎn)可控的步進(jìn)電機(jī)Proteus仿真正反轉(zhuǎn)可控的步進(jìn)電機(jī)Proteus仿真
發(fā)表于 12-22 17:45
?244次下載
基于Proteus的步進(jìn)電機(jī)加減速控制輔助設(shè)計方法
基于Proteus的步進(jìn)電機(jī)加減速控制輔助設(shè)計方法
發(fā)表于 05-03 13:52
?17次下載
基于8051的Proteus仿真-正反轉(zhuǎn)可控的步進(jìn)電機(jī)
基于8051的Proteus仿真-正反轉(zhuǎn)可控的步進(jìn)電機(jī)
發(fā)表于 03-22 18:08
?51次下載
基于Proteus的步進(jìn)電機(jī)控制系統(tǒng)仿真設(shè)計【PDF】
基于Proteus的步進(jìn)電機(jī)控制系統(tǒng)仿真設(shè)計【PDF】
發(fā)表于 01-26 11:14
?97次下載
proteus步進(jìn)電機(jī)仿真
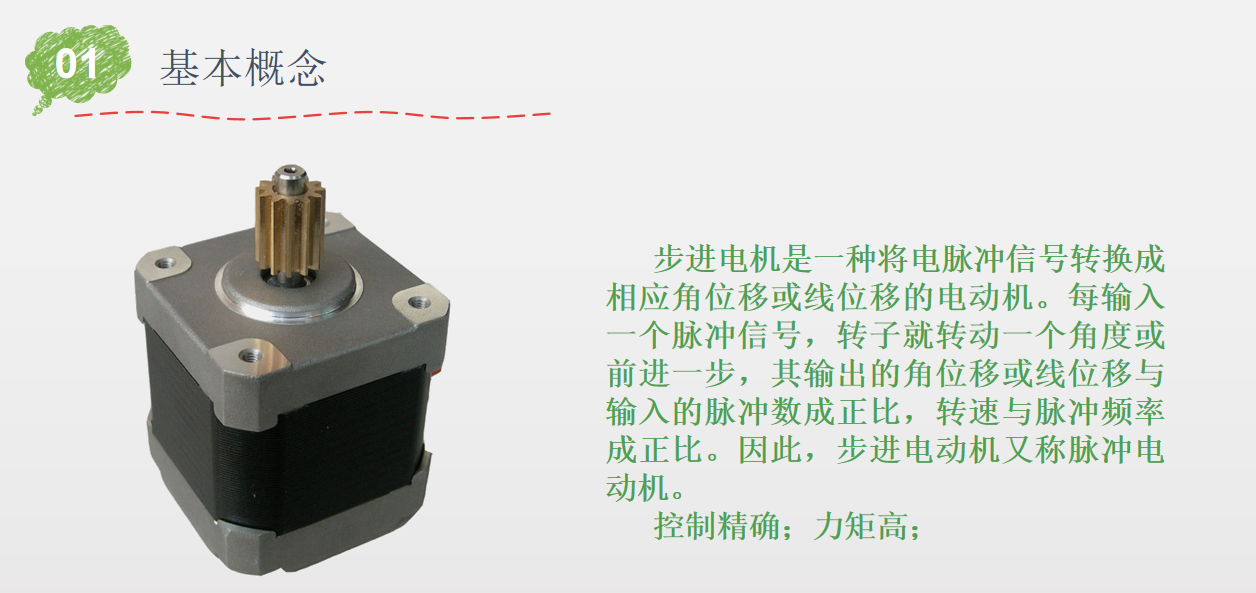
步進(jìn)電機(jī)是一種能夠?qū)㈦娒}沖信號轉(zhuǎn)換成角位移或線位移的機(jī)電元件,它實際上是一種單相或多相同步電動機(jī)。單相步進(jìn)電動機(jī)有單路電脈沖驅(qū)動,輸出功率一般很小,其用途為微小功率驅(qū)動。多相步進(jìn)電動機(jī)
發(fā)表于 02-26 09:56
?5.4w次閱讀
使用proteus仿真步進(jìn)電機(jī)
使用proteus仿真步進(jìn)電機(jī)目錄使用proteus仿真步進(jìn)電機(jī)電路代碼遇到問題總結(jié)電路芯片使用
發(fā)表于 12-31 18:50
?25次下載






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論