") 分割一切?Segment Anything量化加速實(shí)戰(zhàn)
分割一切?Segment Anything量化加速實(shí)戰(zhàn)
01 一、前言
“分割一切,大家一起失業(yè)!”——近期,這樣一句話在社交媒體上大火!這講的就是Segment Anything Model(簡(jiǎn)稱 “SAM” )。SAM 到底是什么?它具備哪些功能?它真的有這么強(qiáng)大嗎?讓我們一起通過(guò)本文了解詳情!
SAM 是一個(gè)由 Meta AI 實(shí)驗(yàn)室推出的強(qiáng)大人工智能圖像分割應(yīng)用,可以自動(dòng)識(shí)別哪些圖像像素屬于一個(gè)對(duì)象,并且對(duì)圖像中各個(gè)對(duì)象進(jìn)行自動(dòng)風(fēng)格處理,可廣泛用于分析科學(xué)圖像、編輯照片等。
SAM 的完整應(yīng)用由一個(gè)圖片編碼器模型(encoder)以及掩碼解碼(mask decoder) + 提示編碼模型(prompt encoder)構(gòu)成,這兩部分都可以被解析為獨(dú)立的靜態(tài)模型。其中大部分的算力負(fù)載和推理延時(shí)都集中在圖片編碼器任務(wù),因此如果進(jìn)一步提升圖片編碼器部分的執(zhí)行效率,就成為了 SAM 應(yīng)用的主要優(yōu)化方向之一。
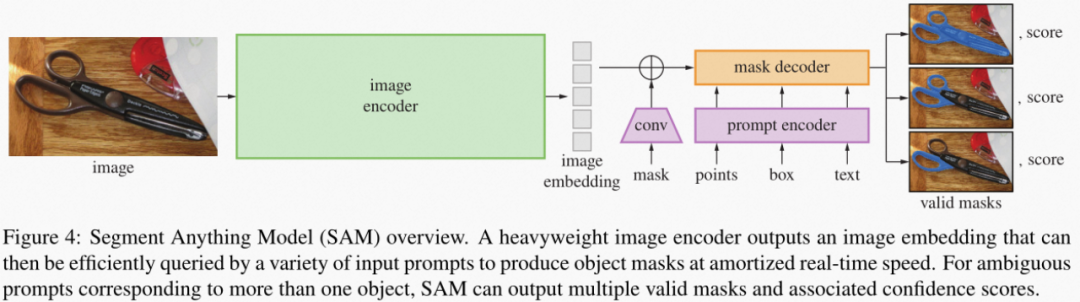
圖:SAM 模型任務(wù)pipeline
本次分享講重點(diǎn)演示如何通過(guò) OpenVINO 的 NNCF 模型壓縮工具實(shí)現(xiàn)對(duì) SAM 編碼器部分的量化壓縮,實(shí)現(xiàn)在 CPU 側(cè)的性能提升。
02 量化介紹
在正式開始實(shí)戰(zhàn)之前,我們不得不提一下量化的概念,量化是指在不改變模型結(jié)構(gòu)的情況下,將模型參數(shù)的表達(dá)區(qū)間從 FP32 映射到 INT8 或是 INT4 范圍,用更小數(shù)值位寬來(lái)表示相同的信息,實(shí)現(xiàn)對(duì)于模型體積的壓縮,降低內(nèi)存消耗,同時(shí)在模型網(wǎng)絡(luò)的執(zhí)行過(guò)程中,系統(tǒng)會(huì)自動(dòng)調(diào)用硬件平臺(tái)專門針對(duì)低比特?cái)?shù)據(jù)優(yōu)化的指令集或 kernel 函數(shù),提升性能。
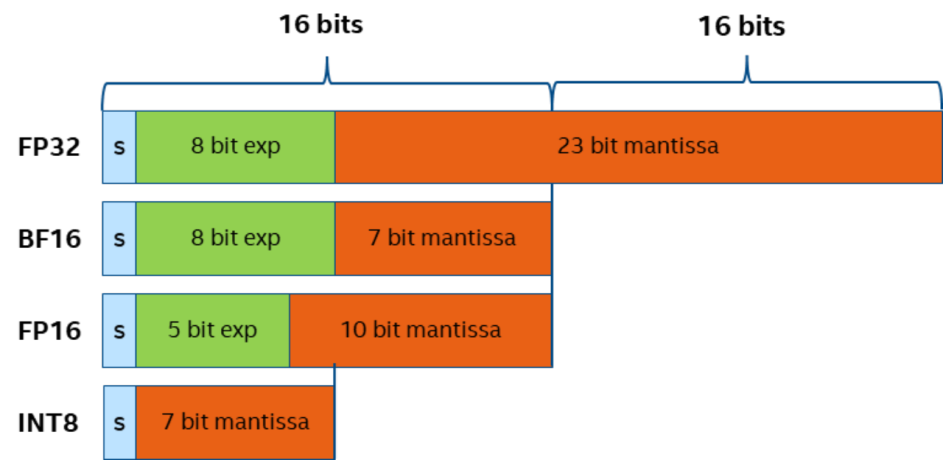
圖:不同精度數(shù)據(jù)的表示位寬
Intel AVX512 VNNI 擴(kuò)展指令集實(shí)現(xiàn)了將原本需要3個(gè)時(shí)鐘周期才能完成的INT8矩陣點(diǎn)乘與加法運(yùn)算壓縮到一個(gè)時(shí)鐘周期,而在最新的 AMX 指令集更是將多個(gè) VNNI 模塊進(jìn)行堆疊實(shí)現(xiàn)了單周期內(nèi)成倍的性能提升。
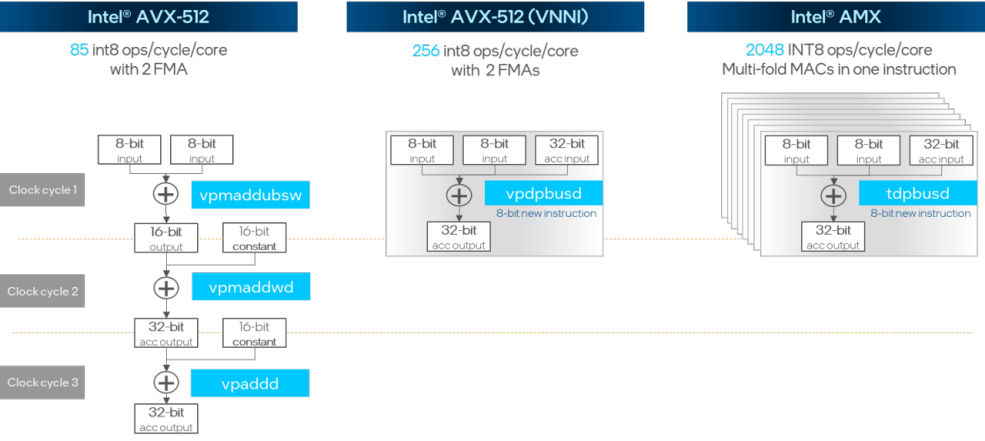
圖:INT8 矩陣點(diǎn)乘與加法運(yùn)算指令集優(yōu)化
03 NNCF 訓(xùn)練后量化模式
NNCF 工具的全稱是 Neural Network Compression Framework,是 OpenVINO 工具鏈中專門用于模型壓縮加速的方案實(shí)現(xiàn),包含量化,剪枝,二值化等多種模型壓縮算法,調(diào)用方式又可以分化為訓(xùn)練后量化 (PTQ) 和 訓(xùn)練時(shí)壓縮 (QAT) 兩種模式,訓(xùn)練時(shí)壓縮要需要引入原始的訓(xùn)練腳本和數(shù)據(jù)集,而訓(xùn)練后量化則可以直接針對(duì)訓(xùn)練生成模型文件進(jìn)行壓縮,無(wú)需額外的訓(xùn)練腳本和標(biāo)注數(shù)據(jù)集參與,這也是 NNCF 在 OpenVINO 2023.0 正式發(fā)布的新功能特性, 而這個(gè)模式也僅僅需要以下兩步便可實(shí)現(xiàn):
1.準(zhǔn)備校驗(yàn)數(shù)據(jù)集,這里的校驗(yàn)數(shù)據(jù)僅用作量化過(guò)程中對(duì)數(shù)據(jù)表示范圍與分布的計(jì)算,因此不需要額外的標(biāo)簽數(shù)據(jù),例如在圖像識(shí)別任務(wù)中,我們僅需要送入200-300張左右的圖片文件即可。此外我們還需要定義 DataLoader 對(duì)象與 transform_fn 數(shù)據(jù)轉(zhuǎn)換函數(shù), DataLoader 用于讀取校驗(yàn)數(shù)據(jù)集中的每一個(gè)元素,transform_fn 用于將讀取的元素轉(zhuǎn)化為 OpenVINO 模型推理的直接輸入數(shù)據(jù)。
import nncf
calibration_loader = torch.utils.data.DataLoader(...)
def transform_fn(data_item):
images, _ = data_item
return images
calibration_dataset = nncf.Dataset(calibration_loader,transform_fn)
2.運(yùn)行模型量化,首先需要導(dǎo)入模型對(duì)象,然后通過(guò) nncf.quantize() 接口,將模型對(duì)象與校驗(yàn)數(shù)據(jù)集綁定開啟量化任務(wù), NNCF 工具可以支持多種模型對(duì)象類型,包含openvino.runtime.Model, torch.nn.Module, onnx.ModelProto以及 tensorflow.Module
model = ... #OpenVINO/ONNX/PyTorch/TF object
quantized_model = nncf.quantize(model, calibration_dataset)
3.(可選)準(zhǔn)確性控制模式,如果發(fā)現(xiàn) NNCF 在默認(rèn)模式下的導(dǎo)出的模型準(zhǔn)確性下降超過(guò)預(yù)期,我們也可以使用準(zhǔn)確性控制模式(accuracy control)完成訓(xùn)練后量化,此時(shí)我們需要加入帶標(biāo)簽的測(cè)試集數(shù)據(jù),用來(lái)評(píng)估模型在量化過(guò)程中哪些 layer 對(duì)模型準(zhǔn)確性損失的影響(敏感度)比較大,并作為排序依據(jù),依次將這些 layer 回退至原始精度,直到模型符合預(yù)期準(zhǔn)確性表現(xiàn)。通過(guò)這個(gè)模式,我們可以在保證模型準(zhǔn)確性的情況下,盡可能壓縮模型體積,實(shí)現(xiàn)性能和準(zhǔn)確性之間的平衡。具體方法可以參考以下鏈接:
https://docs.openvino.ai/nightly/quantization_w_accuracy_control.html
04 Segment Anything + NNCF實(shí)戰(zhàn)
接下來(lái)讓我們具體一步步看下如何使用 NNCF 的 PTQ 模式完成 SAM encoder 的量化。
1.定義數(shù)據(jù)加載器
本示例使用 coco128 作為校驗(yàn)數(shù)據(jù)集,其中包含 128 張 .jpg 格式的圖片。由于在量化 ONNX 或 IR 靜態(tài)模型的情況下,數(shù)據(jù)加載器必須是一個(gè) torch 的 DataLoader 類,因此這里我們需要繼承 torch.utils.data.Dataset 并重新構(gòu)建一個(gè)數(shù)據(jù)集類,其中必須包含__getitem__方法,用于遍歷數(shù)據(jù)集中的每一個(gè)對(duì)象,__len__用于獲取數(shù)據(jù)集的對(duì)象數(shù)量,最后再通過(guò) torch.utils.data.DataLoader 方法生成數(shù)據(jù)加載器。
classCOCOLoader(data.Dataset):
def__init__(self, images_path):
self.images =list(Path(images_path).iterdir())
def__getitem__(self, index):
image_path =self.images[index]
image =cv2.imread(str(image_path))
image =cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
returnimage
def__len__(self):
returnlen(self.images)
coco_dataset =COCOLoader(OUT_DIR /'coco128/images/train2017')
calibration_loader =torch.utils.data.DataLoader(coco_dataset)
2.定義數(shù)據(jù)格式轉(zhuǎn)化模塊
下一步是定義數(shù)據(jù)轉(zhuǎn)化模塊,我們可以調(diào)用之前定義 preprocess_image 函數(shù)完成數(shù)據(jù)的預(yù)處理,值得注意的是由于 calibration_loader 模塊返回的單個(gè)數(shù)據(jù)對(duì)象為 torch tensor 類型 ,而 OpenVINO 的 Python 接口不支持該類型數(shù)據(jù),我們需要先將其強(qiáng)制轉(zhuǎn)化為 numpy 格式。
deftransform_fn(image_data):
image=image_data.numpy()
processed_image=preprocess_image(np.squeeze(image))
returnprocessed_image
calibration_dataset=nncf.Dataset(calibration_loader,transform_fn)
3.運(yùn)行 NNCF 量化
為了確保量化后的模型準(zhǔn)確性,這里我們使用原始的 FP32 ONNX 格式模型作為輸入對(duì)象,而不是 FP16 的 IR 格式模型,然后再將該對(duì)象送入 nncf.quantize 接口執(zhí)行量化,該函數(shù)接口中有幾個(gè)比較重要的額外參數(shù):
# Load FP32 ONNX model
model=core.read_model(onnx_encoder_path)
quantized_model=nncf.quantize(model,
calibration_dataset,
model_type=nncf.parameters.ModelType.TRANSFORMER,
preset=nncf.common.quantization.structs.QuantizationPreset.MIXED)
ov_encoder_path_int8="sam_image_encoder_int8.xml"
serialize(quantized_model,ov_encoder_path_int8)
model_type:模型類別,用于開啟特殊的量化策略,例如在類 Transformer 模型中,我們需要優(yōu)先保證模型的準(zhǔn)確性。
preset:量化模式,默認(rèn)為 PERFORMANCE,使用對(duì)卷積的權(quán)重和偏置均采用對(duì)稱量化算法,有助于提升模型性能,此處為了提升模型準(zhǔn)確性,我們采用 MIXED 模式,采用權(quán)重對(duì)稱量化,偏置非對(duì)稱量化的方法,適合模型中包含非 Relu 或者非對(duì)稱的激活層。
由于 SAM encoder 模型的網(wǎng)絡(luò)結(jié)構(gòu)比較復(fù)雜,而量化過(guò)程中我們需要多次遍歷模型每一個(gè) layer 的參數(shù),所以量化耗時(shí)相對(duì)會(huì)長(zhǎng)一些,請(qǐng)大家耐心等待。這邊建議使用 32G 以上內(nèi)存的硬件設(shè)備,如果遇到內(nèi)存不夠的情況,可以通過(guò) subset_size=100 參數(shù),適當(dāng)降低校驗(yàn)數(shù)據(jù)數(shù)量。
4.模型準(zhǔn)確性比較
接下來(lái)我們比較下 INT8 和 FP16 模型的推理結(jié)果:

圖:prompt 模式 FP16 – INT8 結(jié)果比較

圖:auto 模式 FP16 – INT8 結(jié)果比較
可以看到在 prompt 和 auto 模式下,INT8 模型的準(zhǔn)確性相較 FP16 模型,幾乎沒有任何變化。
注:auto 模式下,mask 將使用隨機(jī)生成的顏色。
5.性能比較
最后我們通過(guò) OpenVINO 自帶的 benchmark_app 工具比較下性能指標(biāo):
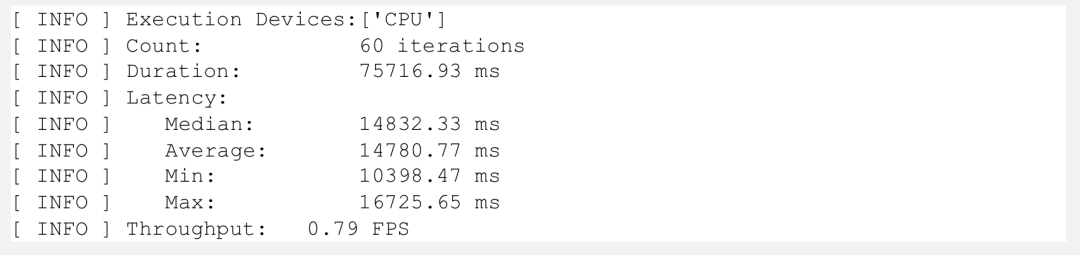
圖:Benchmark 結(jié)果 (FP16)
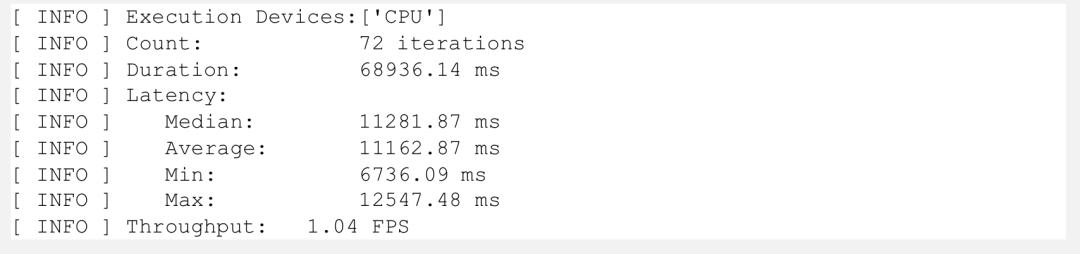
圖:Benchmark 結(jié)果 (INT8)
可以看到在 CPU 端,INT8 模型相較 FP16 提升了大約 30%, 體積從原本的 350MB 壓縮到了 100MB 不到。
05 總結(jié)
鑒于 SAM 出色的自動(dòng)化分割能力,相信未來(lái)會(huì)有越來(lái)越多應(yīng)用場(chǎng)景會(huì)部署這項(xiàng)技術(shù),而在產(chǎn)業(yè)化落地的過(guò)程中,開發(fā)者往往最關(guān)注的就是性能和準(zhǔn)確性之間的平衡,以此獲取成本更優(yōu)的方案。OpenVINO NNCF 工具通過(guò)對(duì) Segment Anything encoder 部分的量化壓縮,在幾乎沒有影響模型準(zhǔn)確性的情況下,顯著提升模型的運(yùn)行效率,降低模型占用空間。
審核編輯:劉清
-
編碼器
+關(guān)注
關(guān)注
45文章
3780瀏覽量
137300 -
人工智能
+關(guān)注
關(guān)注
1804文章
48788瀏覽量
246930 -
SAM
+關(guān)注
關(guān)注
0文章
114瀏覽量
33835 -
類加載器
+關(guān)注
關(guān)注
0文章
6瀏覽量
975
原文標(biāo)題:開發(fā)者實(shí)戰(zhàn) | 分割一切?Segment Anything量化加速實(shí)戰(zhàn)
文章出處:【微信號(hào):SDNLAB,微信公眾號(hào):SDNLAB】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
定時(shí)決定一切:如何使用部分 PLL 創(chuàng)建調(diào)制波形

AI分割一切——用OpenVINO?加速Meta SAM大模型

通用AI大模型Segment Anything在醫(yī)學(xué)影像分割的性能究竟如何?
AI+制造業(yè):機(jī)器視覺開啟掘金新大陸

近期分割大模型發(fā)展情況

Segment Anything量化加速有多強(qiáng)!

YOLOv8最新版本支持SAM分割一切
中科院提出FastSAM快速分割一切模型!比Meta原版提速50倍!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論