") 【科普】干貨!帶你從0了解移動機器人(四) ——移動機器人導航技術
【科普】干貨!帶你從0了解移動機器人(四) ——移動機器人導航技術

移動機器人導航是指移動機器人確定自己在地圖參考系中的位置后,自動規(guī)劃出通往地圖參考系中某個目標位置路徑并沿著該路徑到達目標位置點的能力,是移動機器人行動能力的關鍵。
基于整個智能制造的發(fā)展,移動機器人導航技術大致可分為以下幾種:
1/激光導航
激光導航分為激光反光板導航與激光自然導航兩種方式:
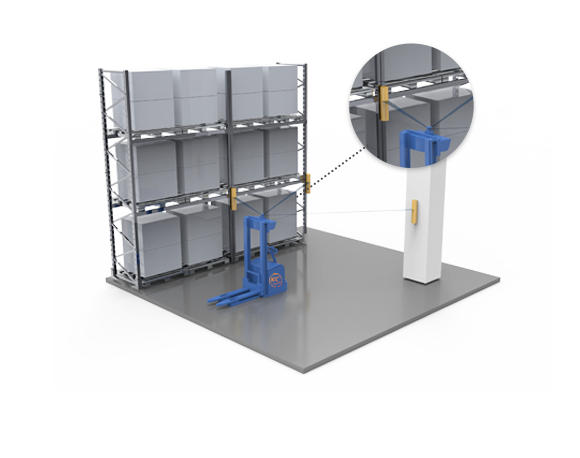
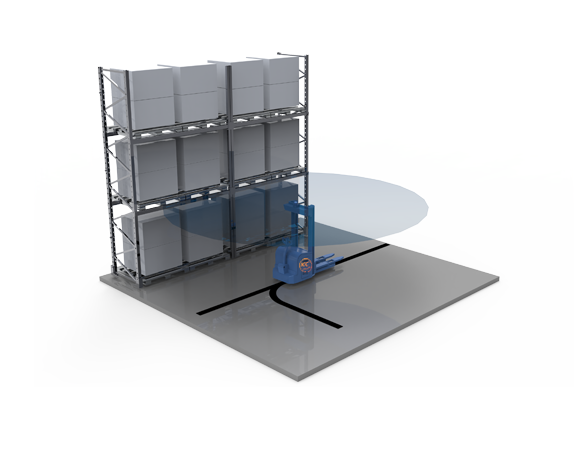
①激光自然導航
過輔助導航標志(二維碼、反射板等),而是通過工作場景中的自然環(huán)境。如:倉庫中的柱子、墻面等作為定位參照物以實現(xiàn)定位導航。

②激光反射板導航
激光反光板導航是在AGV 行駛路徑的周圍安裝位置精確的反射板,激光掃描器安裝在 AGV 車體上。激光掃描器隨 AGV 的行走的同時發(fā)出激光束,發(fā)出的激光束被沿 AGV 行駛路徑鋪設的多組反射板直接反射回來,觸發(fā)控制器記錄旋轉激光頭遇到反射板時的角度。控制器根據這些角度值與實際的這組反光板的位置相匹配,計算出 AGV 的絕對坐標,基于這樣的原理實現(xiàn)非常精確的激光導引。
激光導航優(yōu)點:激光導航的方式使得AGV能夠靈活規(guī)劃路徑,定位準確,精度高,行駛路徑靈活多變,施工較為方方便,能夠適應各種使用環(huán)境。
2/二維碼導航
二維碼導航屬于視覺識別,實現(xiàn)原理是在地面鋪設二維碼陣列,通過移動機器人(AGV/AMR)下方的相機掃描二維碼實現(xiàn)機器人的定位。
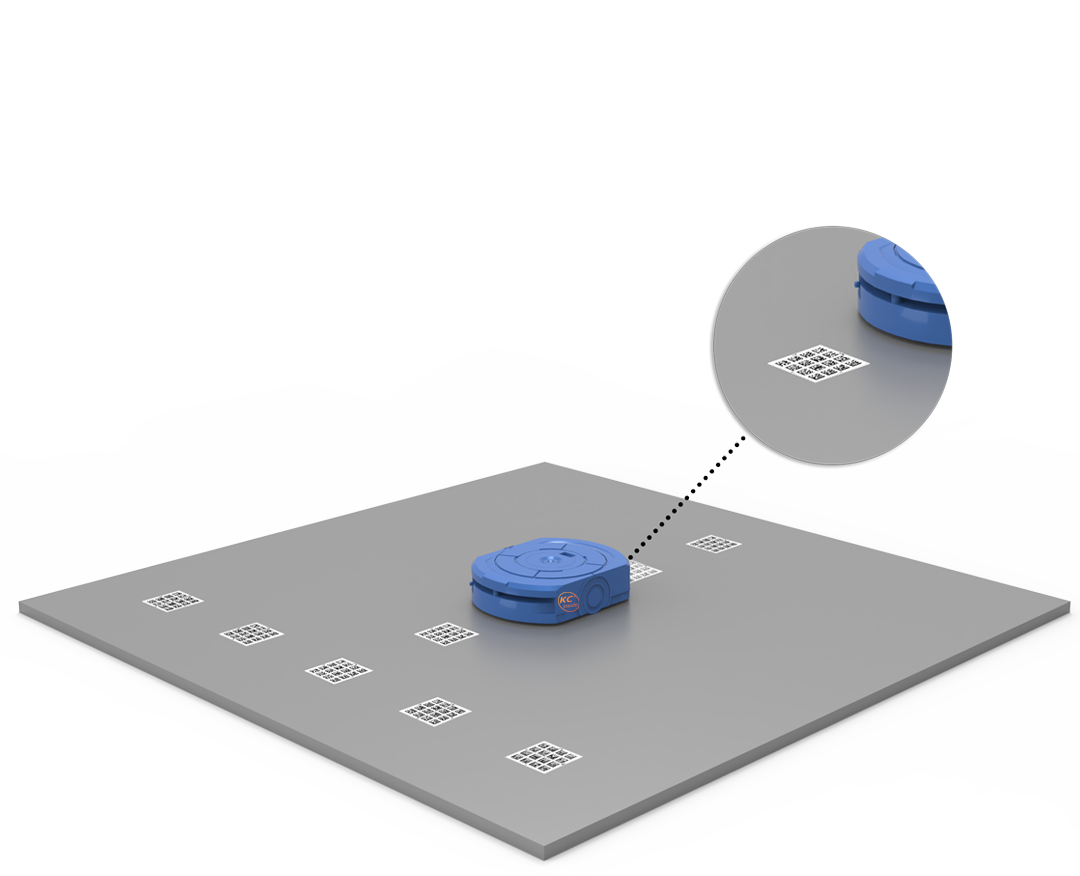
二維碼導航優(yōu)點:位置準確,小巧玲瓏,鋪設、更換路徑更容易,控制通訊方便,不必擔心聲光干擾。
3/磁導航
磁導航的原理是在移動機器人(AGV/AMR)行駛路徑上埋置金屬線,給金屬線加載導航頻率,通過機器人上的電磁感應線圈來感應磁場的強弱,進行識別和跟蹤。
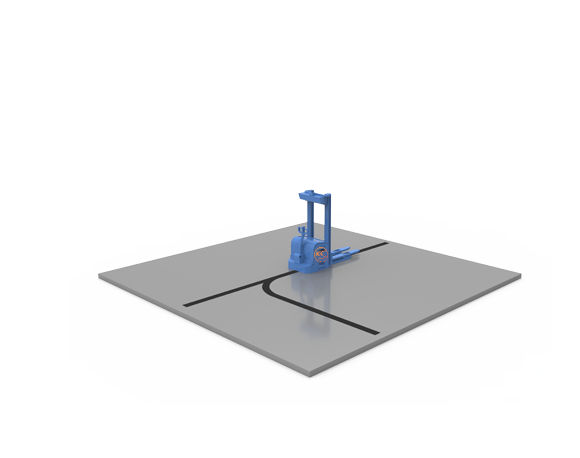
磁導航優(yōu)點:簡單穩(wěn)定且成本不高,技術成熟可靠,對于聲光無干擾性,AGV運行線路明顯性。線路二次變更容易、變更成本低、變更周期短。
4/色帶導航
色帶導航通過視覺傳感器(或組合式的色標傳感器),檢測事先鋪設在地面的色帶與移動機器人(AGV/AMR)的相對位置,從而使小車沿既定路線(色帶)行駛。
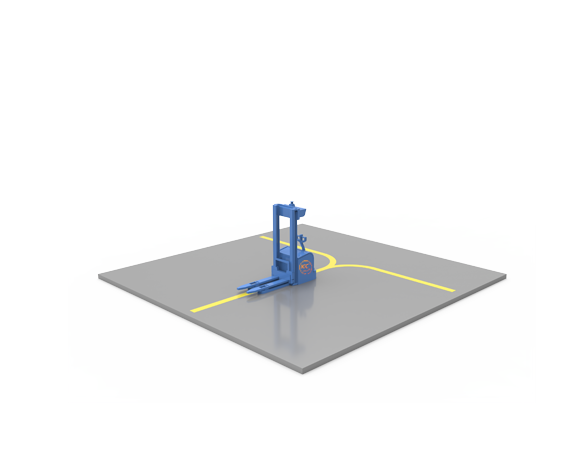
色帶導航優(yōu)點:鋪設容易改路徑,成本低.
5/GNSS導航
通過GNSS導航模塊接收GPS衛(wèi)星信號進行導航定位。一般采用偽距差分動態(tài)定位法,用基準接收機和動態(tài)接收機共同觀測4顆GPS衛(wèi)星,按照一定的算法即可求出某時某刻機器人的三維位置坐標。差分動態(tài)定位消除了星鐘誤差,對于在距離基準站1000km的用戶,可以消除星鐘誤差和對流層引起的誤差,因而可以顯著提高動態(tài)定位精度。
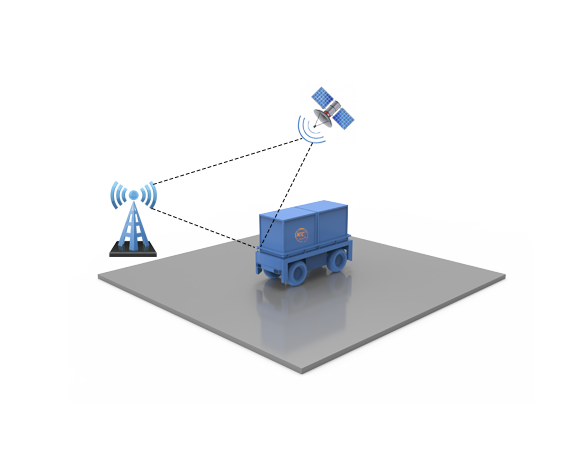
GNSS導航優(yōu)點:通常用于室外遠距離的跟蹤和制導,其精度取決于衛(wèi)星在空中的固定精度和數(shù)量,以及控制對象周圍環(huán)境等因素。
6/混合導航
混合導航是多種導航的集合體,該導航方式是根據現(xiàn)場環(huán)境的變化應運而生的。由于現(xiàn)場環(huán)境的變化導致某種導航暫時無法滿足要求,進而切換到另一種導航方式繼續(xù)滿足AGV連續(xù)運行。
混合導航優(yōu)點:二維碼+激光,激光+磁等多種方式,可適應各種復雜場景,定位精度高。
審核編輯:湯梓紅
-
控制器
+關注
關注
114文章
17116瀏覽量
184442 -
AMR
+關注
關注
3文章
461瀏覽量
31124 -
移動機器人
+關注
關注
2文章
789瀏覽量
34150 -
AGV
+關注
關注
27文章
1438瀏覽量
42373
發(fā)布評論請先 登錄
資料:移動機器人能否自動充電?
Labview My RIO 移動機器人
機器人、協(xié)作機器人和移動機器人,你分的清楚嗎
家庭移動機器人避障常用傳感器及相關技術
如何實現(xiàn)移動機器人的設計?
請問怎么設計一種室外移動機器人組合導航定位系統(tǒng)?
什么是移動機器人軟硬件系統(tǒng)問題
差速移動機器人軌跡跟蹤控制方法
【科普】干貨!帶你從0了解移動機器人(三) ——自主導航系統(tǒng)及上位機軟件設計與實現(xiàn)
【科普】干貨!帶你從0了解移動機器人(四) ——移動機器人導航技術
基于Matlab和VR技術的移動機器人建模及仿真
移動機器人的分類與移動機器人技術研究現(xiàn)狀和未來發(fā)展的分析
【科普】干貨!帶你從0了解移動機器人(一)—— 什么是移動機器人

【科普】干貨!帶你從0了解移動機器人(四) ——移動機器人導航技術





 工商網監(jiān)
工商網監(jiān)
評論