 虹科案例|VisualSim應用案例分享
虹科案例|VisualSim應用案例分享

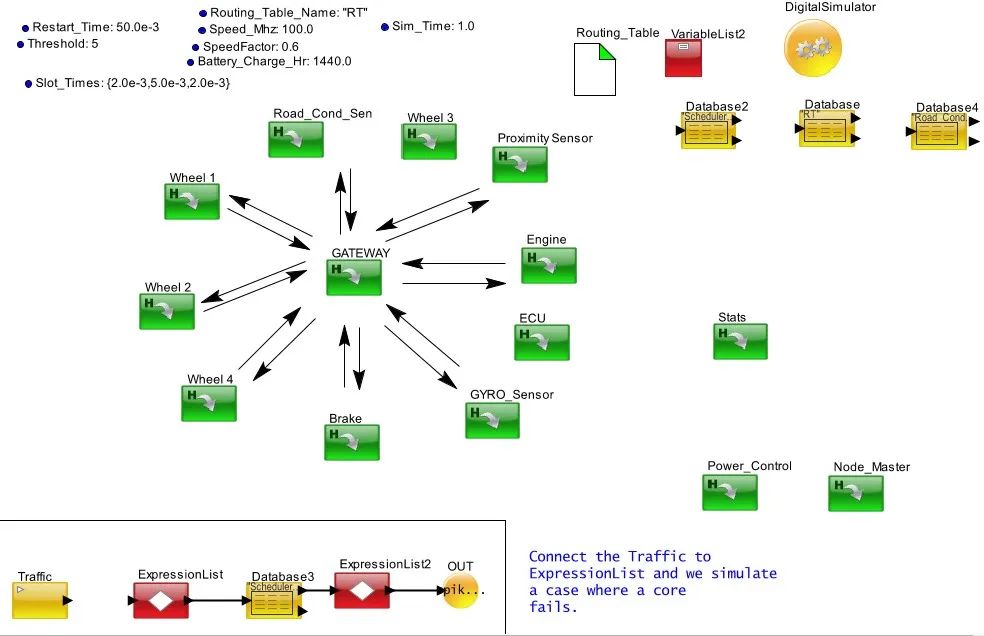
動態網關GW的性能分析

性能瓶頸:分析排隊、調度、QoS和帶寬限制,評估合成網絡流量、現有車輛和AUTOSAR的跟蹤文件。
優化網關軟件:探索不同的架構和實施策略,驗證目標CPU和內存資源的性能。
以太網ASIC和網關硬件:使用不同供應商的功能芯片進行實驗,在單核和多核CPU上探索不同的架構策略,運行目標軟件進行早期驗證。

2

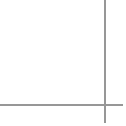
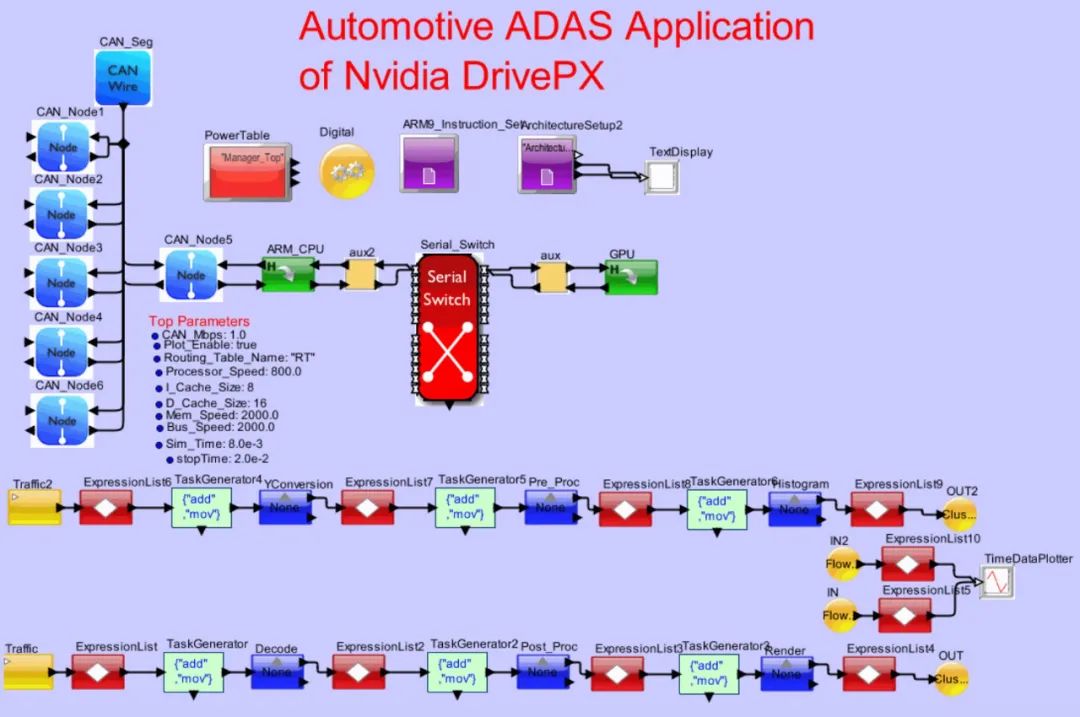
這是在NVidia的Drive-PX平臺上運行的自動駕駛應用程序的框架設計案例。它有兩種類型的配置:6個雷達每40毫秒發送最多15個目標;一個前置攝像頭每40毫秒發送最多15個目標。所有這些數據都來自CAN (FD)總線。多達6個攝像頭,一個800萬像素,另一個150萬像素將原始數據傳送到Drive-PX。
此外,4個雷達具有多達15個目標,周期時間為40毫秒。這個模型評估不同的軟件架構。我們需要根據任務在處理器之間的分布來度量內存使用、處理器使用、延遲和處理器上的吞吐量以及通信鏈接。當然,錯誤的影響將使我們了解給定架構的健壯性。
 ???
???
3
攝像頭多核處理器系統的吞吐量分析
圖像處理系統的挑戰來自時間、功率和服務質量,其中:1.處理多主機總線沖突;2.DRAM訪問的延時包含:3.圖像處理的吞吐量,確定GPU處理核心的資源效率和消耗功率。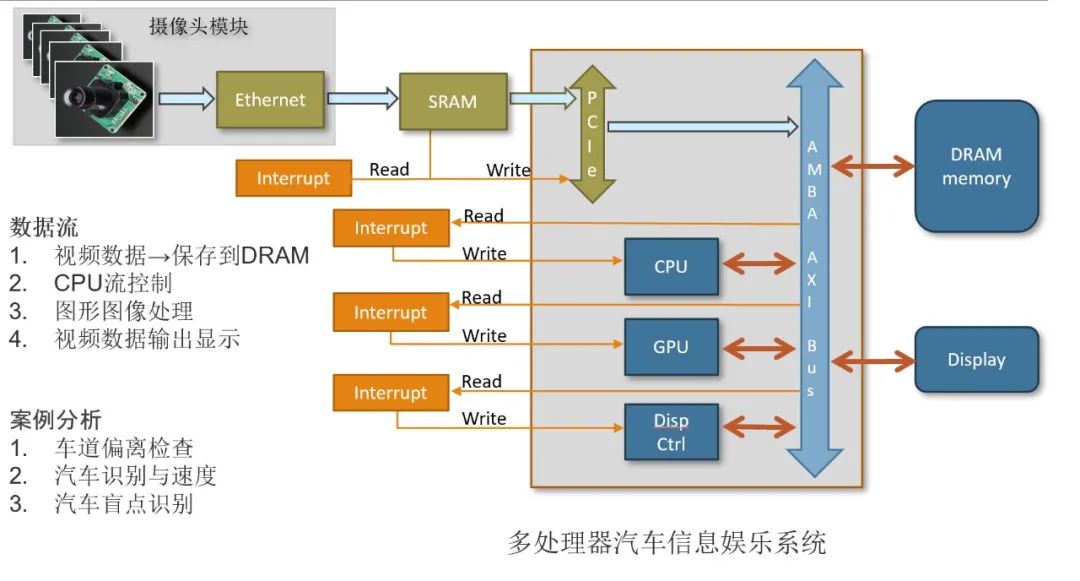
4
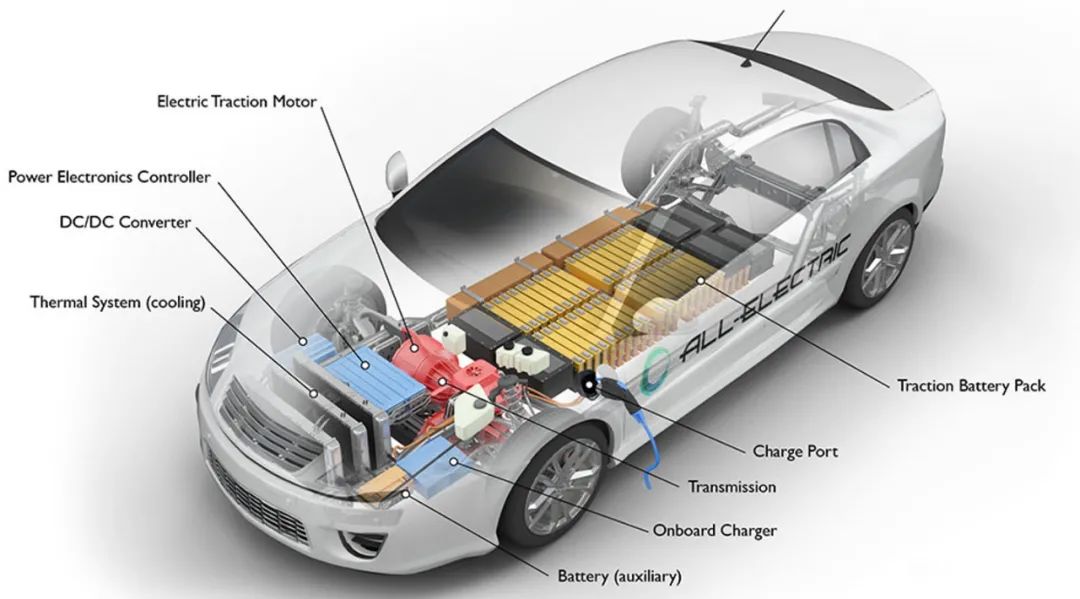
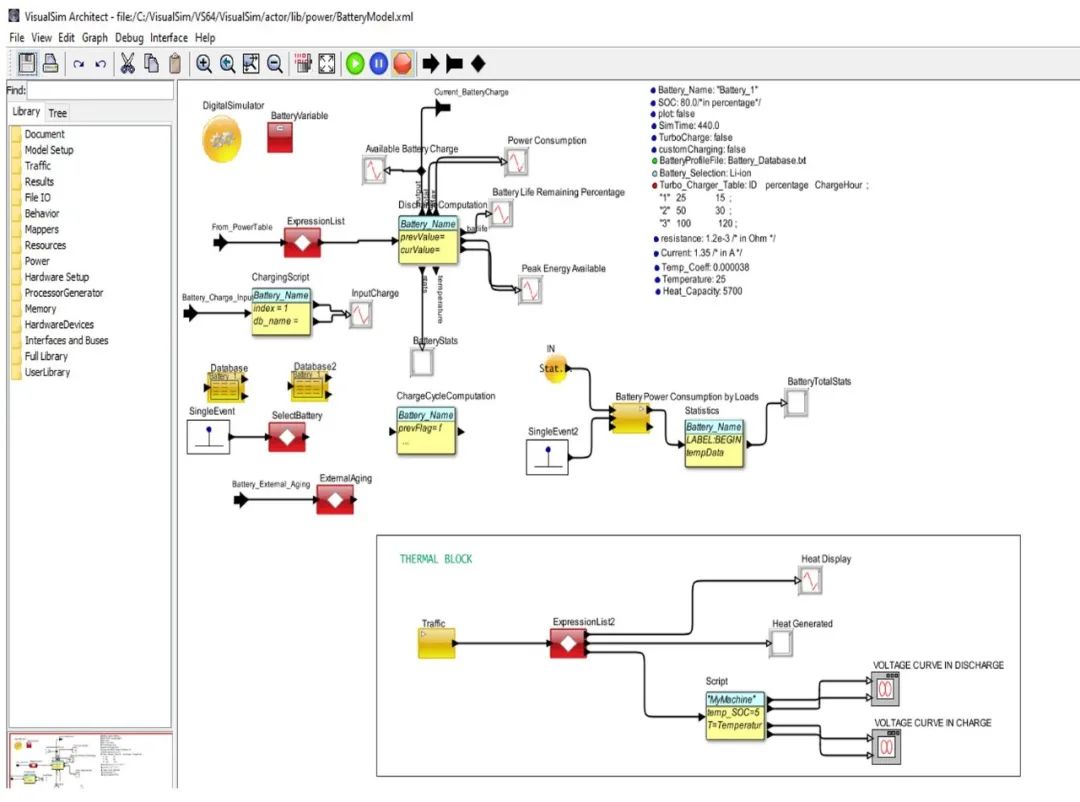
混合動力/電動汽車電池系統架構設計
電動汽車架構設計需求主要包括:電池的大小
電池的生命周期
-
尖峰和沖擊的影響
-
最大充電/放電
響應時間
-
充電/放電率
-
功能正確性
負載響應
對不同數量的系統負載
功能安全鑒定
5
功能安全的模式分析
使用VisualSim建模確定功能安全中最合適的操作模式。其中分離模式,作為雙CPU配置運行(又稱性能模式)。每個TCM是64KB;另外一種鎖步模式,作為冗余CPU配置運行(又稱安全模式)。其中TCM可以合并為256 KB(ATCM和BTCM各128 KB)。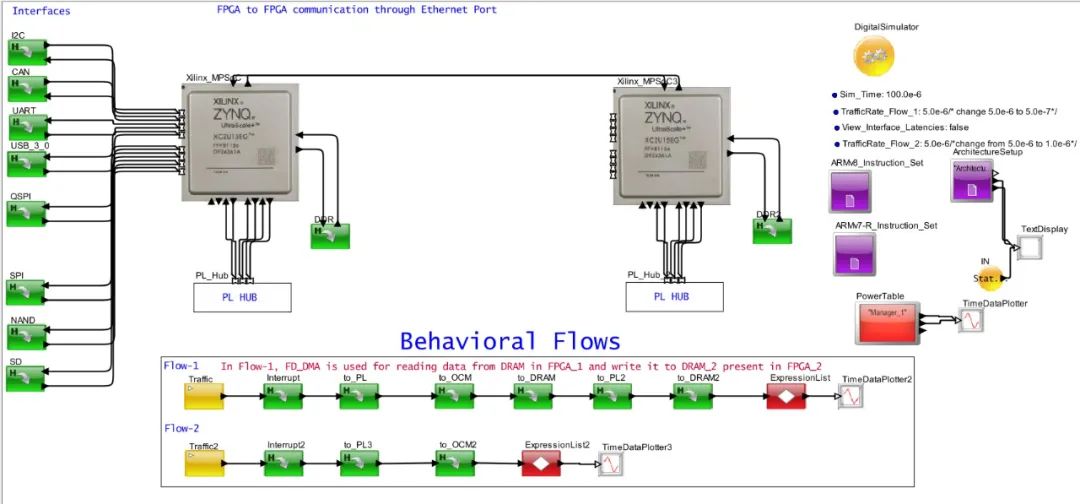
6
AUTOSAR模型與任務優化
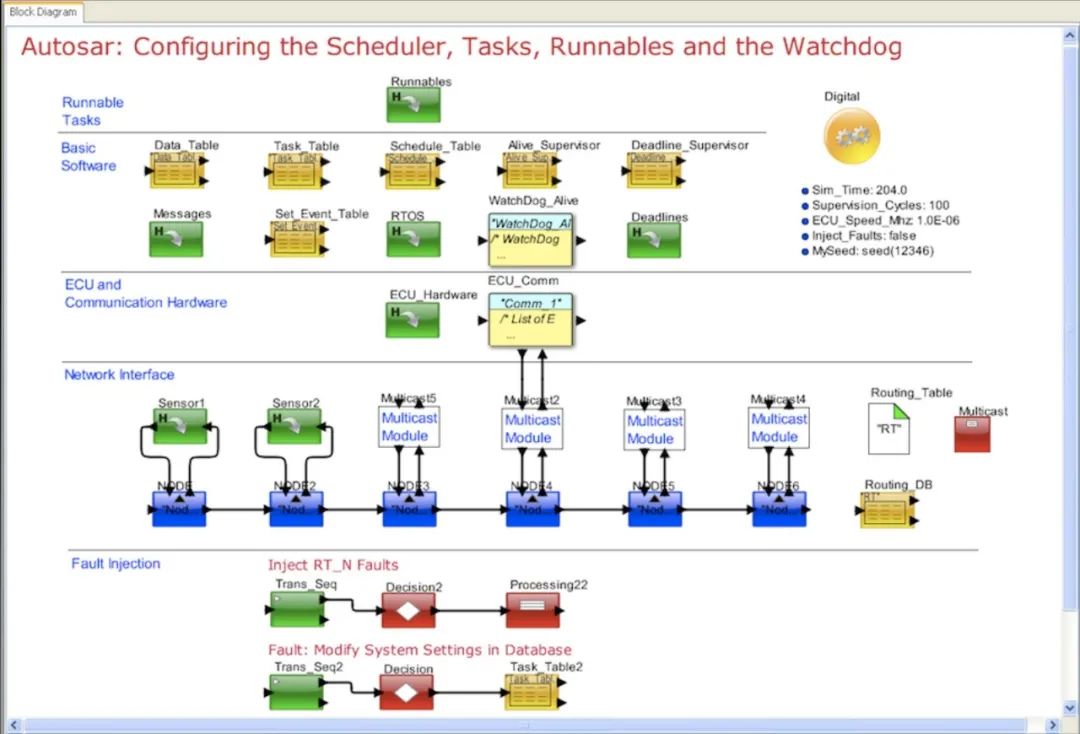
使用VisualSim構建Autosar模型,并進行調度表、任務、Runnables和Watchdog的配置和分析優化。
- WatchDog Manager可以用VisualSim平臺進行建模。
- 可以處理WDM Alive Indications,Deadline。
- 可以添加RT_n的多核執行。
- 包括RT_n、事件和數據的可運行任務預設條件。
- 跟蹤可運行任務、故障的邏輯流程。
- 注入數據結構故障或在特定時間修改設置表。
- 可以添加.xml配置文件的轉換。
7
汽車制動系統的SOTIF影響分析
SOTIF的目標是減少潛在的未知、不安全條件。為了避免潛在的安全隱患,人工智能需要做出決策。這包括需要態勢感知的場景。
通過VisualSim進行感覺場景的搭建與仿真分析,實現ISO 21448考慮到情況,根據可能性做出決定。
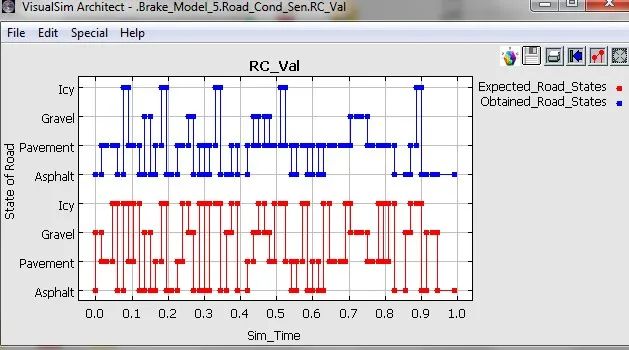
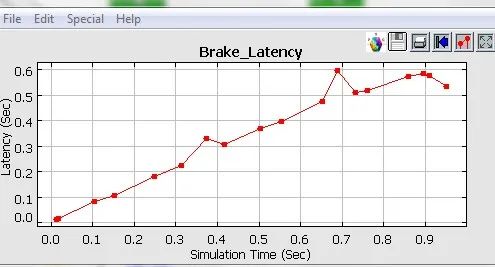
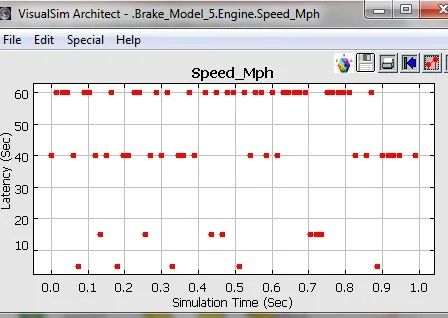
不同路面試驗,得出不同工況下的試驗結果并進行了響應延遲分析。
-
網關
+關注
關注
9文章
5695瀏覽量
53036 -
虹科電子
+關注
關注
0文章
661瀏覽量
14793
發布評論請先 登錄
虹科分享 | 賦能現代化礦業:虹科Owasys堅固型車載通信終端方案

虹科活動 | 廣州示波器診斷體驗交流日圓滿落幕!NVH專場即將上線!
工程師必看!PWM波控制全攻略,虹科LIN模塊助力開發效率翻倍

虹科電子攜手投資機構啟動億元創新基金
虹科直播回放 | IO-Link技術概述與虹科IO-Link OEM
虹科直播 | 2月18日開講!IO-Link技術深度解析!解鎖虹科自研產品+積分好禮!
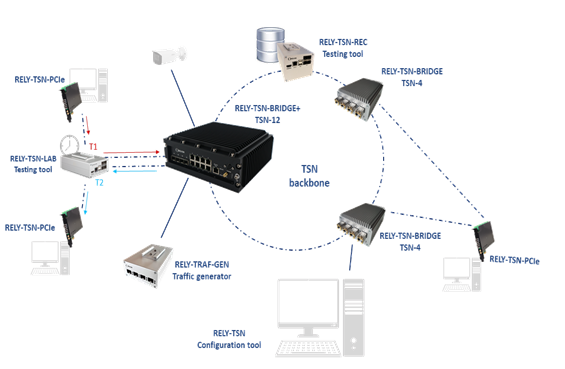
虹科方案 僅需4個步驟!輕松高效搭建虹科TSN測試網絡
虹科電子12月事件回顧
虹科培訓 | 重磅來襲!波形分析課程全面上線!
虹科活動回顧 | 波形診斷開放日-上海站圓滿落幕!
虹科培訓 | 重磅升級!全新模式月底開班,你想學的都在這里!
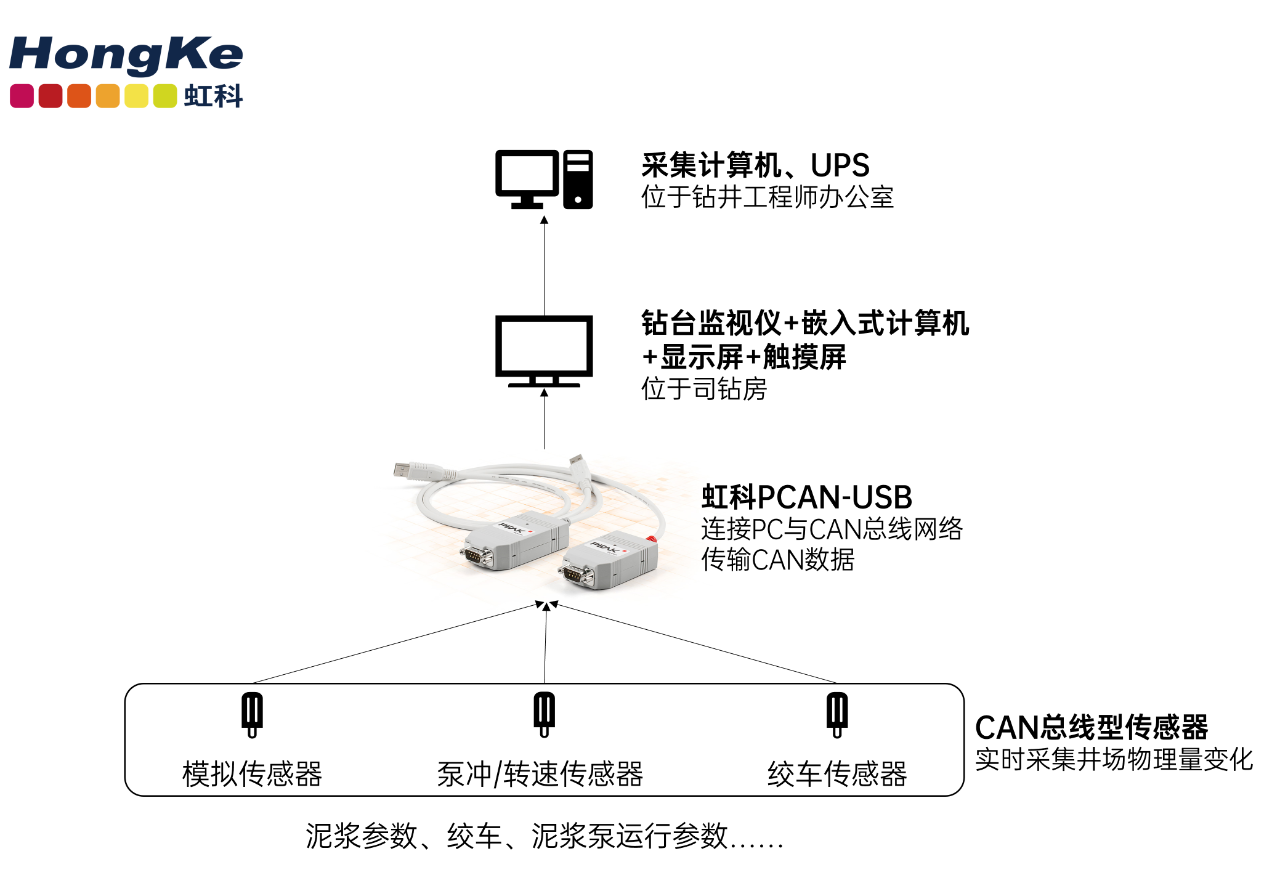
虹科應用 為什么虹科PCAN方案能成為石油工程通訊的首選?
虹科方案 領航智能交通革新:虹科PEAK智行定位車控系統Demo版亮相

虹科應用 當CANoe不是唯一選擇:發現虹科PCAN-Explorer 6
虹科案例 從設備連接到精準監控:虹科溫度采集模塊技術精講






 工商網監
工商網監
評論