") 基于機智云物聯(lián)網(wǎng)平臺的無人機電池電量監(jiān)測系統(tǒng)
基于機智云物聯(lián)網(wǎng)平臺的無人機電池電量監(jiān)測系統(tǒng)

隨著無人機技術的普及,無人機產(chǎn)業(yè)將由現(xiàn)有的單一測繪航測,轉(zhuǎn)型為應用于交通、物流、礦產(chǎn)、電力、水利、農(nóng)業(yè)、娛樂等多個領域的產(chǎn)業(yè),可以說無人機服務已經(jīng)進入人們的日常生活。在無人機電池的管理上,卻一直存在著比較大的安全隱患。由于目前無人機電池電量采集技術的相對落后,一旦因為電池電量不足而引起無人機墜毀,將會造成不可估量的損害。因此,及時有效地監(jiān)測無人機電池的剩余電量,并在故障發(fā)生之前,進行實時報警并自救顯得尤為重要。在對無人機電池管理的調(diào)查基礎上,對無人機電池電量采集技術進行了研究。設計了一種通過實時監(jiān)測無人機各個電池芯電壓,判斷無人機電池的使用狀況、無人機電池的放電平衡狀態(tài)及無人機電池的剩余電量的監(jiān)控系統(tǒng)。在故障發(fā)生前,進行實時報警,從而避免由于電池性能問題,造成無人機損壞。 系統(tǒng)整體介紹本設計是一款基于STM32單片機的無人機電池性能實時線上監(jiān)測系統(tǒng),采用AD采集模塊進行無人機電池監(jiān)測,且連接簡單,拆卸方便。在不破壞原有無人機電池結構的基礎上,提高無人機飛行的安全性。該設計采用在線測量方式,在無人機飛行過程中實時監(jiān)測無人機電池狀態(tài),能及時準確地掌握無人機電池的性能,快速有效地根據(jù)無人機電池狀態(tài)控制無人機的飛行狀態(tài)。同時無人機電池工作狀況可以實時上報云端,相當于飛行器“黑盒子”數(shù)據(jù)實時備份到云端,從而進行無人機電池的線上監(jiān)視,觀察無人機電池電量,并及時報知各芯電壓狀態(tài),保證無人機正常飛行;該裝置也可以對其他多芯鋰電池的各芯電壓狀態(tài)進行監(jiān)測,及時報告無人機電池組的狀態(tài),確保設備正常運行。因此可以應用于缺少電池監(jiān)視的無人機系統(tǒng),以保證無人機的安全。整體功能設計為了在線有效地對無人機電池電量進行實時線上監(jiān)測,系統(tǒng)功能需要由多個子模塊協(xié)作完成。通過對本系統(tǒng)的整體功能進行分析可以得出,無人機電池性能監(jiān)測系統(tǒng)主要由STM32主控模塊、無人機飛行器、電池采樣模塊、液晶顯示模塊及無人機控制模塊等共同組成。各子模塊功能說明STM32主控模塊STM32主控模塊采用STM32F407VET6單片機芯片,運算速度快、集成度高、擴展性強,負責對采集模塊的數(shù)據(jù)進行處理,根據(jù)各電池芯電量狀態(tài),實時采取相應的控制;本裝置無人機電池采用3芯供電,總電壓標準值11.1 V,滿沖狀態(tài)12.6 V,設置保護門限電壓為3.6 V,當無人機電池有一芯電壓低于3.6 V時,保護裝置就會啟動,提示無人機盡快降落,避免墜機風險。液晶顯示模塊液晶顯示模塊是實現(xiàn)人機交互的重要方式,可以彩色顯示各種信息、清晰度高、功耗低,是常用的顯示設備。另外,此電阻式觸摸屏性能優(yōu)良、價格低廉,可以作為良好的人機交互界面。本系統(tǒng)采用了自行設計的電阻觸摸屏,利用2.8寸彩色TFTLCD液晶觸摸屏作為系統(tǒng)的人機交互設備,可用于顯示工作狀態(tài)及各電池芯電壓狀態(tài)以及是否虧電情況,且便于調(diào)試工作,也可以在無人機飛行時去掉該模塊,來減輕無人機自身重量。電池采樣模塊電池采樣模塊用于采集無人機電池各芯的電壓信息,該模塊采用大電阻分壓電路,電路簡單可靠、功耗低、成本低。無人機控制模塊無人機控制模塊采用聲音、光電信號,用于提示無人機電池電壓不足或者單芯出現(xiàn)故障等情況。本系統(tǒng)通過esp8266進行云端連接,實現(xiàn)數(shù)據(jù)上傳云端,方便遠程監(jiān)控工作狀態(tài),控制指令可以通過云端下達,實現(xiàn)遠程控制。系統(tǒng)程序設計系統(tǒng)在進入工作模式之后,首先程序進行初始化,分別設置中斷優(yōu)先級與系統(tǒng)時鐘,然后設置串口1與串口3的波特率、數(shù)據(jù)位、停止位、奇偶校驗、收發(fā)等硬件信息,串口1用來進行調(diào)試信息,串口3發(fā)送無人機電池測試數(shù)據(jù)。LED初始化,LED用來指示程序運行狀態(tài);LCD初始化,LCD是界面顯示電芯測試信息,為了顯示漢字設置W25Q存放漢字庫;W25Q初始化,完成漢字庫讀寫測試;按鍵初始化,ADC初始化,ADC輸入端連接電芯采樣電路,采集電芯電壓變化信息;機智云物聯(lián)網(wǎng)平臺初始化,監(jiān)測裝置通過ESP8266連接機智云平臺,設置機智云對無人機電芯監(jiān)測裝置的采集數(shù)據(jù)點,數(shù)據(jù)傳輸方式、數(shù)值類型、讀寫控制等,獲取該設備的Product Key和Product Secret秘鑰。初始化工作準備就緒后,本裝置連接到機智云物聯(lián)網(wǎng)平臺,可以實時上傳監(jiān)測數(shù)據(jù),如果硬件存在問題,則輸出錯誤信息,等待故障排除與復位。正常飛行時為了減輕重量可以不接LCD屏,LCD屏用于程序調(diào)試方便信息顯示,液晶屏輸出電池信息。采樣電路獲取電池電壓,該模擬量輸入到ADC電路,轉(zhuǎn)換成數(shù)字信息,可以上傳到機智云,方便查詢與記錄,用戶可以通過電腦端分析電芯數(shù)據(jù),也可以通過手機APP實時獲取電芯狀態(tài)。通過將測得的數(shù)據(jù)與設定值進行對比,如果電壓低于設定值,就報警,提示用戶電池處于虧電狀態(tài),及時降落無人機;如果電芯電壓正常就進入循環(huán)狀態(tài),繼續(xù)監(jiān)測。關鍵性能指標本設計有以下四個關鍵性能指標:① 無人機電池測量裝置連接無人機電池充電接口,對每一個電池芯狀態(tài)進行采樣,得到無人機電池的數(shù)據(jù),計算無人機電池的剩余電量和剩余使用時間。② 各個無人機電池的電芯電壓經(jīng)過AD轉(zhuǎn)換,與設置閾值電壓進行比較,根據(jù)電壓狀態(tài)確定無人機飛行狀態(tài),確保電量降低到一定程度或電芯電壓低于閾值時采取安全措施,確保無人機安全降落。③ 無人機電池在線監(jiān)控系統(tǒng),將無人機電池信息通過無線收發(fā)模塊,發(fā)送至地面監(jiān)控裝置,無人機操作人員可以及時有效地掌握電池工作狀態(tài)。④ 機載顯示模塊顯示電池狀態(tài),便于直觀查看電芯信息,為了減輕飛行重量,顯示模塊采用擴展掛載方式,可以去掉顯示模塊。整機完成結構整機完成結構如下圖所示,其中包含當前無人機電池的電量等相關采集數(shù)據(jù)。主要創(chuàng)新點本設計有以下四個主要創(chuàng)新點:①本系統(tǒng)對各電芯分別取樣測量,實時監(jiān)測電池各個電芯,無人機飛行控制器自帶的電池電壓是測量各個電芯串聯(lián)的總電壓,單獨測量各個電芯電壓更能準確反映電池性能狀態(tài),如有一個電芯性能降低或者失效,電池保護系統(tǒng)就會啟動,確保無人機飛行安全。② 無人機電池充電接口作為采樣點,連接簡單,不破壞電池原有結構。③ 機載顯示模塊做成可拆卸結構,方便使用,便于減輕無人機的飛行重量。④ 加入了機智云管理系統(tǒng),可以線上監(jiān)控電池電量,保證在無人機安全電量不足時會發(fā)出警告。結論本裝置設計了一款基于STM32單片機的無人機電池性能實時線上監(jiān)測系統(tǒng)。該系統(tǒng)可以通過實時監(jiān)測無人機各個電池芯電壓情況,來判斷電池使用狀況及電池放電平衡狀態(tài),且能實時監(jiān)測電池的剩余電量,在故障發(fā)生之前,進行實時報警,從而避免由于電池性能問題造成的無人機損壞。該裝置通過進行多次實驗模擬,能夠?qū)崟r采集無人機電池的電量信息,并根據(jù)數(shù)據(jù)設置相應的閾值,采取相應的措施。故本系統(tǒng)可以做到及時有效地預防無人機由于電池電量不足而導致的墜機問題,具有一定的市場前景和實際應用價值。
系統(tǒng)整體介紹本設計是一款基于STM32單片機的無人機電池性能實時線上監(jiān)測系統(tǒng),采用AD采集模塊進行無人機電池監(jiān)測,且連接簡單,拆卸方便。在不破壞原有無人機電池結構的基礎上,提高無人機飛行的安全性。該設計采用在線測量方式,在無人機飛行過程中實時監(jiān)測無人機電池狀態(tài),能及時準確地掌握無人機電池的性能,快速有效地根據(jù)無人機電池狀態(tài)控制無人機的飛行狀態(tài)。同時無人機電池工作狀況可以實時上報云端,相當于飛行器“黑盒子”數(shù)據(jù)實時備份到云端,從而進行無人機電池的線上監(jiān)視,觀察無人機電池電量,并及時報知各芯電壓狀態(tài),保證無人機正常飛行;該裝置也可以對其他多芯鋰電池的各芯電壓狀態(tài)進行監(jiān)測,及時報告無人機電池組的狀態(tài),確保設備正常運行。因此可以應用于缺少電池監(jiān)視的無人機系統(tǒng),以保證無人機的安全。整體功能設計為了在線有效地對無人機電池電量進行實時線上監(jiān)測,系統(tǒng)功能需要由多個子模塊協(xié)作完成。通過對本系統(tǒng)的整體功能進行分析可以得出,無人機電池性能監(jiān)測系統(tǒng)主要由STM32主控模塊、無人機飛行器、電池采樣模塊、液晶顯示模塊及無人機控制模塊等共同組成。各子模塊功能說明STM32主控模塊STM32主控模塊采用STM32F407VET6單片機芯片,運算速度快、集成度高、擴展性強,負責對采集模塊的數(shù)據(jù)進行處理,根據(jù)各電池芯電量狀態(tài),實時采取相應的控制;本裝置無人機電池采用3芯供電,總電壓標準值11.1 V,滿沖狀態(tài)12.6 V,設置保護門限電壓為3.6 V,當無人機電池有一芯電壓低于3.6 V時,保護裝置就會啟動,提示無人機盡快降落,避免墜機風險。液晶顯示模塊液晶顯示模塊是實現(xiàn)人機交互的重要方式,可以彩色顯示各種信息、清晰度高、功耗低,是常用的顯示設備。另外,此電阻式觸摸屏性能優(yōu)良、價格低廉,可以作為良好的人機交互界面。本系統(tǒng)采用了自行設計的電阻觸摸屏,利用2.8寸彩色TFTLCD液晶觸摸屏作為系統(tǒng)的人機交互設備,可用于顯示工作狀態(tài)及各電池芯電壓狀態(tài)以及是否虧電情況,且便于調(diào)試工作,也可以在無人機飛行時去掉該模塊,來減輕無人機自身重量。電池采樣模塊電池采樣模塊用于采集無人機電池各芯的電壓信息,該模塊采用大電阻分壓電路,電路簡單可靠、功耗低、成本低。無人機控制模塊無人機控制模塊采用聲音、光電信號,用于提示無人機電池電壓不足或者單芯出現(xiàn)故障等情況。本系統(tǒng)通過esp8266進行云端連接,實現(xiàn)數(shù)據(jù)上傳云端,方便遠程監(jiān)控工作狀態(tài),控制指令可以通過云端下達,實現(xiàn)遠程控制。系統(tǒng)程序設計系統(tǒng)在進入工作模式之后,首先程序進行初始化,分別設置中斷優(yōu)先級與系統(tǒng)時鐘,然后設置串口1與串口3的波特率、數(shù)據(jù)位、停止位、奇偶校驗、收發(fā)等硬件信息,串口1用來進行調(diào)試信息,串口3發(fā)送無人機電池測試數(shù)據(jù)。LED初始化,LED用來指示程序運行狀態(tài);LCD初始化,LCD是界面顯示電芯測試信息,為了顯示漢字設置W25Q存放漢字庫;W25Q初始化,完成漢字庫讀寫測試;按鍵初始化,ADC初始化,ADC輸入端連接電芯采樣電路,采集電芯電壓變化信息;機智云物聯(lián)網(wǎng)平臺初始化,監(jiān)測裝置通過ESP8266連接機智云平臺,設置機智云對無人機電芯監(jiān)測裝置的采集數(shù)據(jù)點,數(shù)據(jù)傳輸方式、數(shù)值類型、讀寫控制等,獲取該設備的Product Key和Product Secret秘鑰。初始化工作準備就緒后,本裝置連接到機智云物聯(lián)網(wǎng)平臺,可以實時上傳監(jiān)測數(shù)據(jù),如果硬件存在問題,則輸出錯誤信息,等待故障排除與復位。正常飛行時為了減輕重量可以不接LCD屏,LCD屏用于程序調(diào)試方便信息顯示,液晶屏輸出電池信息。采樣電路獲取電池電壓,該模擬量輸入到ADC電路,轉(zhuǎn)換成數(shù)字信息,可以上傳到機智云,方便查詢與記錄,用戶可以通過電腦端分析電芯數(shù)據(jù),也可以通過手機APP實時獲取電芯狀態(tài)。通過將測得的數(shù)據(jù)與設定值進行對比,如果電壓低于設定值,就報警,提示用戶電池處于虧電狀態(tài),及時降落無人機;如果電芯電壓正常就進入循環(huán)狀態(tài),繼續(xù)監(jiān)測。關鍵性能指標本設計有以下四個關鍵性能指標:① 無人機電池測量裝置連接無人機電池充電接口,對每一個電池芯狀態(tài)進行采樣,得到無人機電池的數(shù)據(jù),計算無人機電池的剩余電量和剩余使用時間。② 各個無人機電池的電芯電壓經(jīng)過AD轉(zhuǎn)換,與設置閾值電壓進行比較,根據(jù)電壓狀態(tài)確定無人機飛行狀態(tài),確保電量降低到一定程度或電芯電壓低于閾值時采取安全措施,確保無人機安全降落。③ 無人機電池在線監(jiān)控系統(tǒng),將無人機電池信息通過無線收發(fā)模塊,發(fā)送至地面監(jiān)控裝置,無人機操作人員可以及時有效地掌握電池工作狀態(tài)。④ 機載顯示模塊顯示電池狀態(tài),便于直觀查看電芯信息,為了減輕飛行重量,顯示模塊采用擴展掛載方式,可以去掉顯示模塊。整機完成結構整機完成結構如下圖所示,其中包含當前無人機電池的電量等相關采集數(shù)據(jù)。主要創(chuàng)新點本設計有以下四個主要創(chuàng)新點:①本系統(tǒng)對各電芯分別取樣測量,實時監(jiān)測電池各個電芯,無人機飛行控制器自帶的電池電壓是測量各個電芯串聯(lián)的總電壓,單獨測量各個電芯電壓更能準確反映電池性能狀態(tài),如有一個電芯性能降低或者失效,電池保護系統(tǒng)就會啟動,確保無人機飛行安全。② 無人機電池充電接口作為采樣點,連接簡單,不破壞電池原有結構。③ 機載顯示模塊做成可拆卸結構,方便使用,便于減輕無人機的飛行重量。④ 加入了機智云管理系統(tǒng),可以線上監(jiān)控電池電量,保證在無人機安全電量不足時會發(fā)出警告。結論本裝置設計了一款基于STM32單片機的無人機電池性能實時線上監(jiān)測系統(tǒng)。該系統(tǒng)可以通過實時監(jiān)測無人機各個電池芯電壓情況,來判斷電池使用狀況及電池放電平衡狀態(tài),且能實時監(jiān)測電池的剩余電量,在故障發(fā)生之前,進行實時報警,從而避免由于電池性能問題造成的無人機損壞。該裝置通過進行多次實驗模擬,能夠?qū)崟r采集無人機電池的電量信息,并根據(jù)數(shù)據(jù)設置相應的閾值,采取相應的措施。故本系統(tǒng)可以做到及時有效地預防無人機由于電池電量不足而導致的墜機問題,具有一定的市場前景和實際應用價值。
系統(tǒng)整體介紹本設計是一款基于STM32單片機的無人機電池性能實時線上監(jiān)測系統(tǒng),采用AD采集模塊進行無人機電池監(jiān)測,且連接簡單,拆卸方便。在不破壞原有無人機電池結構的基礎上,提高無人機飛行的安全性。該設計采用在線測量方式,在無人機飛行過程中實時監(jiān)測無人機電池狀態(tài),能及時準確地掌握無人機電池的性能,快速有效地根據(jù)無人機電池狀態(tài)控制無人機的飛行狀態(tài)。同時無人機電池工作狀況可以實時上報云端,相當于飛行器“黑盒子”數(shù)據(jù)實時備份到云端,從而進行無人機電池的線上監(jiān)視,觀察無人機電池電量,并及時報知各芯電壓狀態(tài),保證無人機正常飛行;該裝置也可以對其他多芯鋰電池的各芯電壓狀態(tài)進行監(jiān)測,及時報告無人機電池組的狀態(tài),確保設備正常運行。因此可以應用于缺少電池監(jiān)視的無人機系統(tǒng),以保證無人機的安全。整體功能設計為了在線有效地對無人機電池電量進行實時線上監(jiān)測,系統(tǒng)功能需要由多個子模塊協(xié)作完成。通過對本系統(tǒng)的整體功能進行分析可以得出,無人機電池性能監(jiān)測系統(tǒng)主要由STM32主控模塊、無人機飛行器、電池采樣模塊、液晶顯示模塊及無人機控制模塊等共同組成。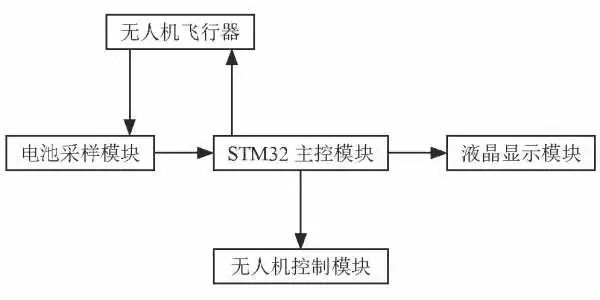
各子模塊功能說明STM32主控模塊STM32主控模塊采用STM32F407VET6單片機芯片,運算速度快、集成度高、擴展性強,負責對采集模塊的數(shù)據(jù)進行處理,根據(jù)各電池芯電量狀態(tài),實時采取相應的控制;本裝置無人機電池采用3芯供電,總電壓標準值11.1 V,滿沖狀態(tài)12.6 V,設置保護門限電壓為3.6 V,當無人機電池有一芯電壓低于3.6 V時,保護裝置就會啟動,提示無人機盡快降落,避免墜機風險。液晶顯示模塊液晶顯示模塊是實現(xiàn)人機交互的重要方式,可以彩色顯示各種信息、清晰度高、功耗低,是常用的顯示設備。另外,此電阻式觸摸屏性能優(yōu)良、價格低廉,可以作為良好的人機交互界面。本系統(tǒng)采用了自行設計的電阻觸摸屏,利用2.8寸彩色TFTLCD液晶觸摸屏作為系統(tǒng)的人機交互設備,可用于顯示工作狀態(tài)及各電池芯電壓狀態(tài)以及是否虧電情況,且便于調(diào)試工作,也可以在無人機飛行時去掉該模塊,來減輕無人機自身重量。電池采樣模塊電池采樣模塊用于采集無人機電池各芯的電壓信息,該模塊采用大電阻分壓電路,電路簡單可靠、功耗低、成本低。無人機控制模塊無人機控制模塊采用聲音、光電信號,用于提示無人機電池電壓不足或者單芯出現(xiàn)故障等情況。本系統(tǒng)通過esp8266進行云端連接,實現(xiàn)數(shù)據(jù)上傳云端,方便遠程監(jiān)控工作狀態(tài),控制指令可以通過云端下達,實現(xiàn)遠程控制。系統(tǒng)程序設計系統(tǒng)在進入工作模式之后,首先程序進行初始化,分別設置中斷優(yōu)先級與系統(tǒng)時鐘,然后設置串口1與串口3的波特率、數(shù)據(jù)位、停止位、奇偶校驗、收發(fā)等硬件信息,串口1用來進行調(diào)試信息,串口3發(fā)送無人機電池測試數(shù)據(jù)。LED初始化,LED用來指示程序運行狀態(tài);LCD初始化,LCD是界面顯示電芯測試信息,為了顯示漢字設置W25Q存放漢字庫;W25Q初始化,完成漢字庫讀寫測試;按鍵初始化,ADC初始化,ADC輸入端連接電芯采樣電路,采集電芯電壓變化信息;機智云物聯(lián)網(wǎng)平臺初始化,監(jiān)測裝置通過ESP8266連接機智云平臺,設置機智云對無人機電芯監(jiān)測裝置的采集數(shù)據(jù)點,數(shù)據(jù)傳輸方式、數(shù)值類型、讀寫控制等,獲取該設備的Product Key和Product Secret秘鑰。初始化工作準備就緒后,本裝置連接到機智云物聯(lián)網(wǎng)平臺,可以實時上傳監(jiān)測數(shù)據(jù),如果硬件存在問題,則輸出錯誤信息,等待故障排除與復位。正常飛行時為了減輕重量可以不接LCD屏,LCD屏用于程序調(diào)試方便信息顯示,液晶屏輸出電池信息。采樣電路獲取電池電壓,該模擬量輸入到ADC電路,轉(zhuǎn)換成數(shù)字信息,可以上傳到機智云,方便查詢與記錄,用戶可以通過電腦端分析電芯數(shù)據(jù),也可以通過手機APP實時獲取電芯狀態(tài)。通過將測得的數(shù)據(jù)與設定值進行對比,如果電壓低于設定值,就報警,提示用戶電池處于虧電狀態(tài),及時降落無人機;如果電芯電壓正常就進入循環(huán)狀態(tài),繼續(xù)監(jiān)測。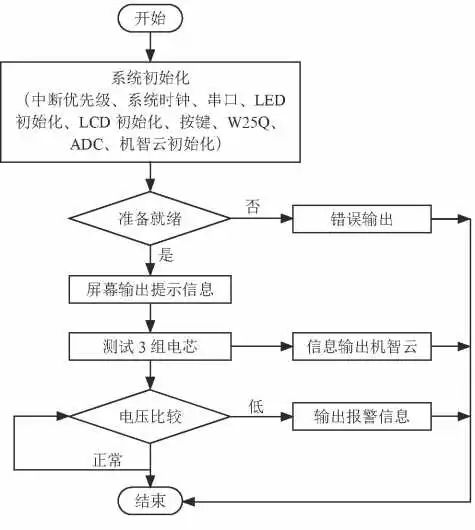
系統(tǒng)主程序重要代碼如下:
adcx1=Get_Adc_Average(ADC_Channel_3,20);LCD_ShowxNum(134,130,adcx1,4,16,0);if(adcx1<4096/3.3*3.8/6.17)LCD_ShowString(30,70,200,16,16,"voltage1isbad");ElseLCD_ShowString(30,70,200,16,16,"voltage1isgood");temp1=(float)adcx1*(3.3/4096)*6.17;adcx1e=temp1;LCD_ShowxNum(142,150,adcx1e,1,16,0);=adcx1e;=1000;LCD_ShowxNum(158,150,temp1,3,16,0X80);delay_ms(250);adcx2=Get_Adc_Average(ADC_Channel_4,20);LCD_ShowxNum(142,170,adcx2,4,16,0);if(adcx2<4096/3.3*7.6/6.17)LCD_ShowString(30,90,200,16,16,"voltage2isbad");ElseLCD_ShowString(30,110,200,16,16,"voltage3isgood");temp3=(float)adcx3*(3.3/4096)*6.11;adcx3e=temp3;LCD_ShowxNum(134,230,adcx3e,2,16,0);=adcx3e;=1000;LCD_ShowxNum(158,230,temp3,3,16,0X80);delay_ms(250);
關鍵性能指標本設計有以下四個關鍵性能指標:① 無人機電池測量裝置連接無人機電池充電接口,對每一個電池芯狀態(tài)進行采樣,得到無人機電池的數(shù)據(jù),計算無人機電池的剩余電量和剩余使用時間。② 各個無人機電池的電芯電壓經(jīng)過AD轉(zhuǎn)換,與設置閾值電壓進行比較,根據(jù)電壓狀態(tài)確定無人機飛行狀態(tài),確保電量降低到一定程度或電芯電壓低于閾值時采取安全措施,確保無人機安全降落。③ 無人機電池在線監(jiān)控系統(tǒng),將無人機電池信息通過無線收發(fā)模塊,發(fā)送至地面監(jiān)控裝置,無人機操作人員可以及時有效地掌握電池工作狀態(tài)。④ 機載顯示模塊顯示電池狀態(tài),便于直觀查看電芯信息,為了減輕飛行重量,顯示模塊采用擴展掛載方式,可以去掉顯示模塊。整機完成結構整機完成結構如下圖所示,其中包含當前無人機電池的電量等相關采集數(shù)據(jù)。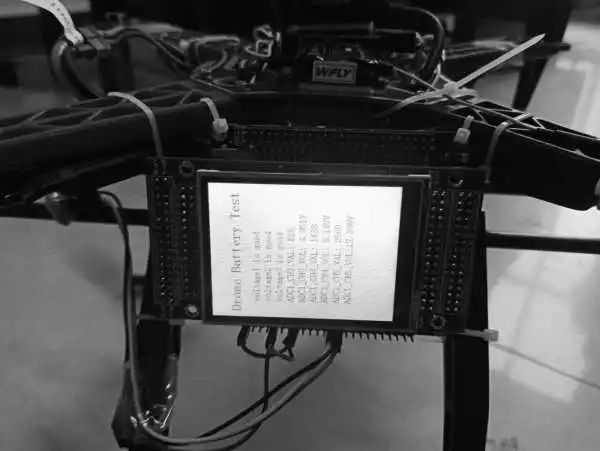
主要創(chuàng)新點本設計有以下四個主要創(chuàng)新點:①本系統(tǒng)對各電芯分別取樣測量,實時監(jiān)測電池各個電芯,無人機飛行控制器自帶的電池電壓是測量各個電芯串聯(lián)的總電壓,單獨測量各個電芯電壓更能準確反映電池性能狀態(tài),如有一個電芯性能降低或者失效,電池保護系統(tǒng)就會啟動,確保無人機飛行安全。② 無人機電池充電接口作為采樣點,連接簡單,不破壞電池原有結構。③ 機載顯示模塊做成可拆卸結構,方便使用,便于減輕無人機的飛行重量。④ 加入了機智云管理系統(tǒng),可以線上監(jiān)控電池電量,保證在無人機安全電量不足時會發(fā)出警告。結論本裝置設計了一款基于STM32單片機的無人機電池性能實時線上監(jiān)測系統(tǒng)。該系統(tǒng)可以通過實時監(jiān)測無人機各個電池芯電壓情況,來判斷電池使用狀況及電池放電平衡狀態(tài),且能實時監(jiān)測電池的剩余電量,在故障發(fā)生之前,進行實時報警,從而避免由于電池性能問題造成的無人機損壞。該裝置通過進行多次實驗模擬,能夠?qū)崟r采集無人機電池的電量信息,并根據(jù)數(shù)據(jù)設置相應的閾值,采取相應的措施。故本系統(tǒng)可以做到及時有效地預防無人機由于電池電量不足而導致的墜機問題,具有一定的市場前景和實際應用價值。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
監(jiān)測系統(tǒng)
+關注
關注
8文章
2883瀏覽量
82519
發(fā)布評論請先 登錄
相關推薦
熱點推薦
無人機智能巡檢系統(tǒng)賦能工廠智慧運維
無人機智能巡檢系統(tǒng)賦能工廠智慧運維 在現(xiàn)代工廠園區(qū)中,設備密集、管線復雜、環(huán)境多變,傳統(tǒng)的人工巡檢模式已難以滿足日益增長的安全高效管理需求。無人機智能巡檢系統(tǒng)的引入,正以其升維視角和智
無人機智能巡檢系統(tǒng)革新運維與監(jiān)控的未來
地提升了工作效率,還開創(chuàng)了智能化運維的新紀元。 ? ? ? ?無人機智能巡檢系統(tǒng)融合了新型的飛行控制技術、高清圖像采集設備以及先進的數(shù)據(jù)分析算法。通過預設的任務路線,無人機能夠自主飛行并執(zhí)行精確拍攝任務,實時傳輸數(shù)據(jù)至地面站或
無人機智能巡檢系統(tǒng)讓運維更省心
? ? ? ?無人機智能巡檢系統(tǒng)讓運維更省心 ? ? ? ?在需要大量人工巡檢的行業(yè)里,無人機智能巡檢系統(tǒng)正快速成為企業(yè)升級運維能力的好幫手。它用飛行+智能的組合,代替?zhèn)鹘y(tǒng)靠人眼觀察、
植保無人機電池的選擇和保養(yǎng)策略
在農(nóng)業(yè)現(xiàn)代化的浪潮中,植保無人機以其高效、精準的作業(yè)方式,成為了農(nóng)田管理的得力助手。而無人機的心臟——電池,則是確保其穩(wěn)定、持久飛行的關鍵。正確選擇和保養(yǎng)植保無人機電池,不僅能夠提升作
植保無人機電池性能測試方法
隨著農(nóng)業(yè)現(xiàn)代化的不斷推進,植保無人機作為一種高效、精準的農(nóng)業(yè)植保工具,正逐漸受到廣大農(nóng)戶和農(nóng)業(yè)企業(yè)的青睞。植保無人機的性能在很大程度上取決于其搭載的電池系統(tǒng),因此,對植保
無人機智能巡檢系統(tǒng)提升光伏電站運維效率
優(yōu)勢,已成為基礎設施維護、環(huán)境監(jiān)測和災害應急等領域的亦可璀璨明星。特別是在光伏電站的應用方面,無人機智能巡檢系統(tǒng)徹底解決了傳統(tǒng)人工巡檢的多個痛點。 ?????? 無人機智能巡檢

無人機電力動力系統(tǒng)組成包括
無人機電力動力系統(tǒng)是無人機實現(xiàn)飛行任務的核心組成部分,為無人機提供所需的飛行動力和能源。一個完整的無人機電力動力
無人機智能巡檢系統(tǒng):光伏電站維護的新紀元
無人機智能巡檢系統(tǒng):光伏電站維護的新紀元 隨著全球?qū)η鍧嵞茉葱枨蟮脑鲩L,光伏電站作為重要的綠色能源基礎設施,其建設和運營規(guī)模不斷擴大。為了保障電站的高效運行,對光伏設備的定期巡檢變得尤為重要。傳統(tǒng)
無人機智能巡檢系統(tǒng)與傳統(tǒng)巡檢方式的對比
無人機智能巡檢系統(tǒng)與傳統(tǒng)巡檢方式的對比 在當今科技飛速發(fā)展的時代,無人機智能巡檢系統(tǒng)已經(jīng)逐漸成為現(xiàn)代工業(yè)領域的一大創(chuàng)新。相較于傳統(tǒng)巡檢方式,無人機智
光伏電站無人機智能巡檢系統(tǒng)
?????? 光伏電站無人機智能巡檢系統(tǒng) ?????? 光伏電站無人機智能巡檢系統(tǒng)基于可搭載熱紅外成像相機和可見光成像相機的無人機,采集光伏

光伏電站無人機智能巡檢平臺
光伏電站無人機智能巡檢平臺 無人機光伏巡檢解決方案,采用高精度長續(xù)航無人機搭載熱成像航拍相機,可快速通過熱信號的生成來確定太陽能電池板受損情
無人機智能巡檢系統(tǒng)到底有哪些作用
系統(tǒng)到底有哪些作用呢? 無人機智能巡檢系統(tǒng)主要由無人機、無人機機庫、AI算法、紅外相機、紅外傳感器、無人
無人機智能巡檢系統(tǒng)
能巡檢系統(tǒng)可以迅速飛越廣大區(qū)域,通過高分辨率的傳感器實時采集大量數(shù)據(jù)。這包括電力線路、建筑物、自然環(huán)境等方面的信息。相較于傳統(tǒng)巡檢方式,無人機智能巡檢極大提高了數(shù)據(jù)采集的效率,有助于更全面、迅速地了解目標區(qū)域的情況





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論