") 自動(dòng)駕駛系統(tǒng)性能測(cè)試評(píng)估
自動(dòng)駕駛系統(tǒng)性能測(cè)試評(píng)估
目前自動(dòng)駕駛系統(tǒng)整體處于蓬勃生長(zhǎng)狀態(tài),從新勢(shì)力造車到傳統(tǒng)車企,配備不同級(jí)別的自動(dòng)駕駛系統(tǒng)車輛道路演示層出不窮。自動(dòng)駕駛領(lǐng)域日新月異的發(fā)展也帶來(lái)不少挑戰(zhàn)和問(wèn)題,比如缺乏具有明確性和實(shí)施性的評(píng)價(jià)指標(biāo)對(duì)自動(dòng)駕駛系統(tǒng)性能進(jìn)行測(cè)試評(píng)判。
MXeval軟件是便捷的自動(dòng)駕駛性能和車輛動(dòng)力學(xué)評(píng)估軟件,該軟件融合了國(guó)際標(biāo)準(zhǔn)化組織制定的標(biāo)準(zhǔn)(如ISO 11270:2014)、歐洲經(jīng)濟(jì)委員會(huì)汽車法規(guī)(如UN ECE R79)和大量客戶實(shí)施多年研究積累知識(shí)經(jīng)驗(yàn)形成的測(cè)試場(chǎng)景庫(kù),以乘客主觀體驗(yàn)為最小單元,將主觀感受轉(zhuǎn)換為客觀的KPI性能指標(biāo),通過(guò)KPI指標(biāo)來(lái)客觀衡量車輛自動(dòng)駕駛系統(tǒng)或車輛動(dòng)力學(xué)性能。以KPI指標(biāo)為基準(zhǔn),針對(duì)性調(diào)整車輛自動(dòng)駕駛系統(tǒng)或車輛動(dòng)力學(xué)參數(shù),來(lái)優(yōu)化車輛系統(tǒng)性能。
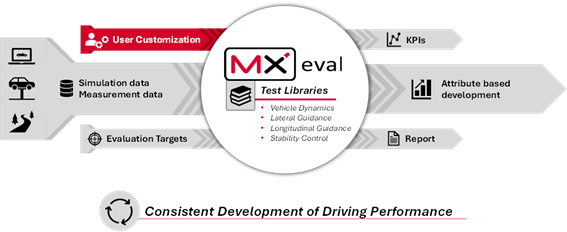
MXeval 4.0版本軟件在原有軟件的基礎(chǔ)上,緊跟自動(dòng)駕駛領(lǐng)域潮流,以客戶實(shí)際使用需求為導(dǎo)向,新增測(cè)試場(chǎng)景庫(kù),定制化KPI關(guān)鍵性指標(biāo)和報(bào)告等特性,將軟件推向了一個(gè)新的維度。
增加穩(wěn)定控制場(chǎng)景庫(kù)
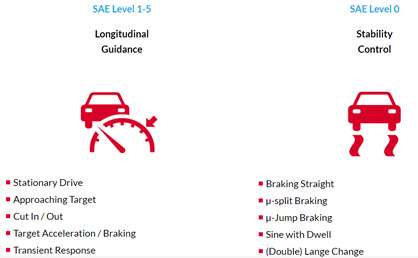
MXeval4.0在橫向LKAS、縱向ACC和車輛動(dòng)力學(xué)場(chǎng)景庫(kù)的基礎(chǔ)上,新增Stability Control場(chǎng)景庫(kù),用來(lái)測(cè)試和評(píng)估車輛制動(dòng)和動(dòng)態(tài)穩(wěn)定控制性能。μ-Jump Braking用來(lái)測(cè)試車輛在不同道路摩擦系數(shù)下的制動(dòng)性能;μ-Split Braking用來(lái)測(cè)試車輛制動(dòng)踏板在最大開(kāi)度下的制動(dòng)性能,該KPI評(píng)估方法覆蓋了ISO14512:1999標(biāo)準(zhǔn);Sine With Dwell依據(jù) UNECE R140法規(guī),用來(lái)測(cè)試車輛在高速(80kph)行駛時(shí)電子穩(wěn)定控制系統(tǒng)的性能;Lane Change雙移線變道工況基于ISO 3888標(biāo)準(zhǔn)提取關(guān)鍵性能指標(biāo)用來(lái)測(cè)試車輛操控穩(wěn)定性。
MXeval軟件不僅具象化了法規(guī)和標(biāo)準(zhǔn)中的測(cè)試場(chǎng)景規(guī)范,還將規(guī)范中測(cè)試描述落地為易于實(shí)施的測(cè)試方法,為不同階段的車輛測(cè)試試驗(yàn)提供指導(dǎo)。工程師根據(jù)MXeval軟件中對(duì)具體測(cè)試場(chǎng)景和測(cè)試步驟的描述,執(zhí)行車輛運(yùn)動(dòng)策略,采集測(cè)試場(chǎng)景規(guī)定的數(shù)據(jù),得到離線數(shù)據(jù)導(dǎo)入軟件之后根據(jù)生成的客觀KPI指標(biāo)即可分析車輛在該場(chǎng)景下的性能表現(xiàn)。
自定義測(cè)試場(chǎng)景
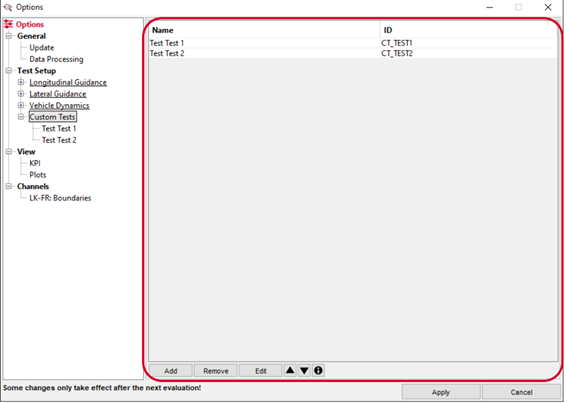
除了軟件自帶測(cè)試場(chǎng)景外,MXeval4.0還支持添加自定義測(cè)試場(chǎng)景。方便工程師根據(jù)實(shí)際工作需要,在軟件中設(shè)計(jì)特定的測(cè)試場(chǎng)景、目標(biāo)信號(hào)和關(guān)鍵性能指標(biāo),得到目標(biāo)測(cè)試數(shù)據(jù)之后導(dǎo)入軟件后進(jìn)行客觀評(píng)估。軟件自定義測(cè)試場(chǎng)景操作簡(jiǎn)單明了,在現(xiàn)有測(cè)試場(chǎng)景庫(kù)的框架下,點(diǎn)擊幾下鼠標(biāo)添加測(cè)試,即可集成到軟件內(nèi)部進(jìn)行客觀評(píng)估。
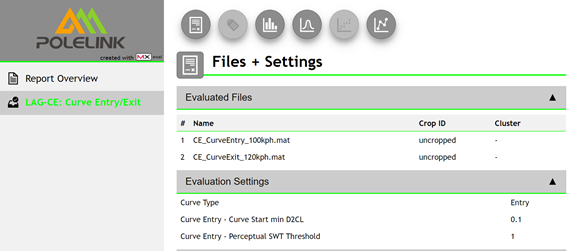
自定義報(bào)告模板
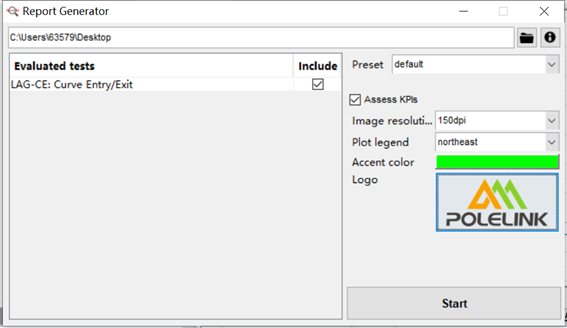
對(duì)于分析結(jié)果,MXeval軟件提供標(biāo)準(zhǔn)規(guī)范的html格式報(bào)告,報(bào)告詳盡的包含了報(bào)告生成日期、創(chuàng)建報(bào)告人員、使用軟件版本、測(cè)試場(chǎng)景名稱、評(píng)估數(shù)據(jù)文件名稱和類型 、評(píng)估設(shè)置,信號(hào)配置和客觀性能指標(biāo)參數(shù)的信息。MXeval4.0版本軟件中,可以定制報(bào)告模板,配置報(bào)告中顯示公司標(biāo)志和分割線顏色,豐富了報(bào)告的獨(dú)特性和可讀性。
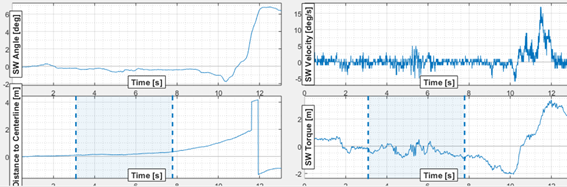
子圖可視化
在分析客觀性能指標(biāo)時(shí),圖形化的數(shù)據(jù)能直觀地反應(yīng)數(shù)據(jù)變化規(guī)律。當(dāng)兩個(gè)或者多個(gè)性能指標(biāo)參數(shù)需要對(duì)比時(shí),在多個(gè)界面來(lái)回切換視圖,不僅會(huì)降低工作效率,還可能因?yàn)閳D像間接對(duì)比影響分析準(zhǔn)確度。MXeval4.0軟件新增多個(gè)子圖分析,可以在一個(gè)界面中并排分析多個(gè)指標(biāo)視圖,從而對(duì)評(píng)估結(jié)果提供更準(zhǔn)確的反饋。
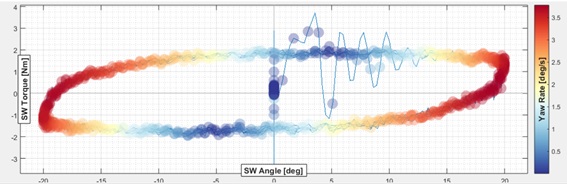
熱力圖可視化
在分析客觀性能指標(biāo)過(guò)程中,會(huì)遇到三個(gè)信號(hào)的情況,這些信號(hào)之間不是簡(jiǎn)單的線性或者非線性關(guān)系,無(wú)法利用二維坐標(biāo)進(jìn)行直觀化分析。MXeval4.0軟件提供三維熱力圖,以某個(gè)信號(hào)為橫軸,另一個(gè)信號(hào)為縱軸,其他信號(hào)以不同顏色的熱力圖形式顯示,方便分析信號(hào)數(shù)據(jù)之間的關(guān)聯(lián)性。
MXeval4.0不斷完善軟件功能豐富測(cè)試場(chǎng)景庫(kù),提供自定義測(cè)試和定制化報(bào)告,為用戶提供稱心應(yīng)手的自動(dòng)駕駛和車輛動(dòng)力學(xué)性能測(cè)試分析工具。
北匯信息作為MdynamiX公司合作伙伴,攜手MdynamiX一起將國(guó)際自動(dòng)駕駛和動(dòng)力學(xué)性能評(píng)估測(cè)試的方法和經(jīng)驗(yàn)分享給國(guó)內(nèi)汽車行業(yè),助力中國(guó)客戶在自動(dòng)駕駛和車輛動(dòng)力學(xué)領(lǐng)域的發(fā)展。
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14145瀏覽量
168997
發(fā)布評(píng)論請(qǐng)先 登錄
AI將如何改變自動(dòng)駕駛?
2024加州自動(dòng)駕駛測(cè)試里程驟降50%
自動(dòng)駕駛測(cè)試在設(shè)計(jì)環(huán)節(jié)中有何關(guān)鍵作用?
一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

多通道負(fù)載測(cè)試和性能評(píng)估?

自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL

MXeval操作與評(píng)估結(jié)果展示#MXeval #主觀評(píng)估 #ADAS #自動(dòng)駕駛

自動(dòng)駕駛HiL測(cè)試方案介紹#ADAS #自動(dòng)駕駛 #VTHiL
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
中級(jí)自動(dòng)駕駛架構(gòu)師應(yīng)該學(xué)習(xí)哪些知識(shí)
初級(jí)自動(dòng)駕駛架構(gòu)師應(yīng)該學(xué)習(xí)哪些知識(shí)
自動(dòng)駕駛仿真測(cè)試實(shí)踐:高精地圖仿真

小馬智行再獲自動(dòng)駕駛卡車編隊(duì)測(cè)試許可
小馬智行首批開(kāi)啟北京南站自動(dòng)駕駛測(cè)試






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論