 巍泰技術智能交通高速公路定點式測速儀雷達與移動測速儀雷達原理與應用
巍泰技術智能交通高速公路定點式測速儀雷達與移動測速儀雷達原理與應用

1、雷達測速是什么
測速雷達主要利用了多普勒效應(Doppler Effect),當目標向雷達天線靠近時,反射信號頻率將高于發射機頻率;反之,當目標遠離天線而去時,反射信號頻率將低于發射機率。如此即可借由頻率的改變數值,計算出目標與雷達的相對速度。
2、雷達測速儀的類別
一般道路上的雷達測速儀分為固定測速和移動測速兩類。固定測速又分為定點式雷達測速和區間測速。固定測速顧名思義就是指定點式安裝測速儀的方式來進行定點測速。區別于移動測速的靈活性,移動測速儀可以在同一條道路不同位置、也可以是不同道路進行靈活測速,一般移動測速多以警車巡邏測速的方式進行。
(1)定點式雷達測速儀
通過將測速儀安置在龍門架或者其他橫桿上,通過將測速儀與地面擺放呈一定角度(測速儀與路面夾角不宜超過30度)。
(2)移動雷達測速儀
一般將雷達測速儀安裝在交警巡邏車上或者裝在三腳架上擺放在道路兩邊進行踩點式測速。
3、測速儀雷達的選型
(1)定點式測速儀雷達
巍泰技術平板型測速雷達TBR-100、多目標測速雷達TBR-220基于微波多普勒效應,可在小于400km/h速度范圍內對檢測區域內行駛的車輛進行速度準確檢測,測速精度為-4~0km/h;觸發精準,觸發位置精度小于1m;抓拍車輛位置的一致性高,車輛抓拍率高達99%;同時,具有較好的環境適應性與穩定性,能夠適應溫度變化和濕度變化較大的室外工作環境。其中,平板型測速雷達TBR-100已通過公安部安全與警用電子產品質量檢測中心檢驗評定,并獲得《計量器具型式批準證書》與國家測速儀型式評價實驗室(公安)的《計量器具型式評價報告》,可作為交通管理部門在高速公路、城際公路、城市干線公路、城鄉低等級公路等交通事故多發地段進行違法超速抓拍取證的依據。
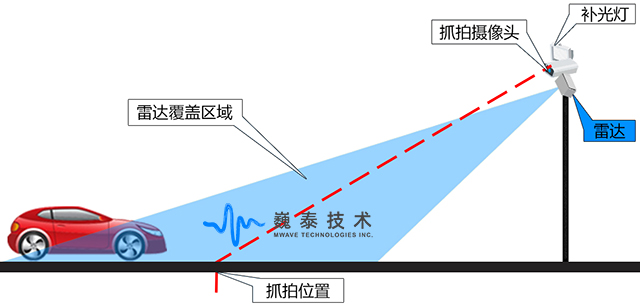 卡口測速抓拍系統工作示意圖
卡口測速抓拍系統工作示意圖如上圖所示,雷達安裝于L桿或龍門架等橫桿上,位于被測道路正上方,面向道路,雷達相對于地面的偏轉角度就是雷達的安裝角度,觸發雷達的同時相機抓拍,抓拍位置就是觸發位置,觸發位置到雷達的水平距離就是觸發距離,觸發位置需要在雷達的覆蓋范圍內。
平板型測速雷達TBR-100安裝于單個道路上方中間部分,由于雷達水平角度僅4.5°,只覆蓋單個車道,有效避免了相鄰車道的車輛速度干擾。
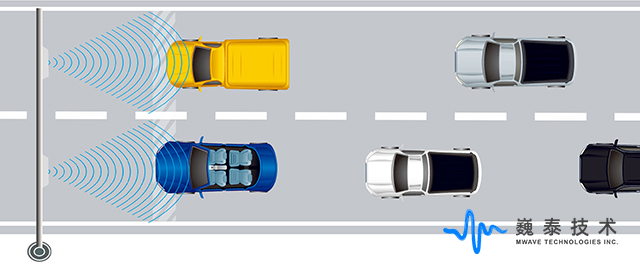 單車道定點測速儀雷達工作示意圖
單車道定點測速儀雷達工作示意圖多目標測速雷達TBR-220安裝于道路上方中間部分,根據道路情況不同,每個雷達可以監測2-4個車道,由于雷達縱向角度只有5.5°,使雷達在監控多車道同時,又具有雷達探測區域小、有效區分連續車輛,并且觸發位置準確的優勢。
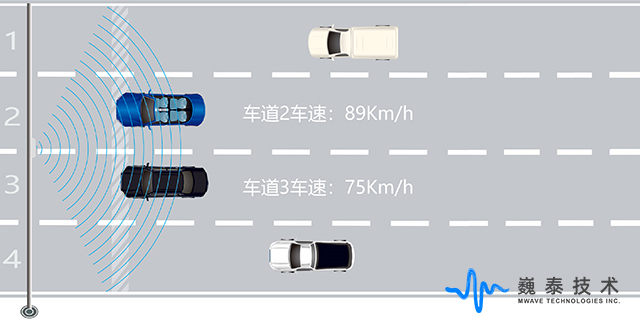 多車道定點測速儀雷達工作示意圖
多車道定點測速儀雷達工作示意圖(2)移動測速儀雷達
巍泰技術交通信息檢測側裝微波雷達TBR-310、側裝多車道多目標雷達TBR-321基于微波多普勒效應,采用窄波束準確測速定位,既有效避免了相鄰車道干擾,又可實現1~4車道上超速車輛的檢測;可在小于400km/h速度范圍內對檢測區域內行駛的車輛進行速度準確檢測,測速精度為-4~0km/h;觸發位置精度小于1m,抓拍車輛位置的一致性高,車輛抓拍率高達99%;同時,具有較好的環境適應性與穩定性,能夠適應溫度變化和濕度變化較大的室外工作環境。其中,交通信息檢測側裝微波雷達TBR-310已通過公安部安全與警用電子產品質量檢測中心檢驗評定,并已廣泛應用于高速公路、國省道、城鎮街道等各等級道路的移動便攜式超速及違法行為的抓拍取證。
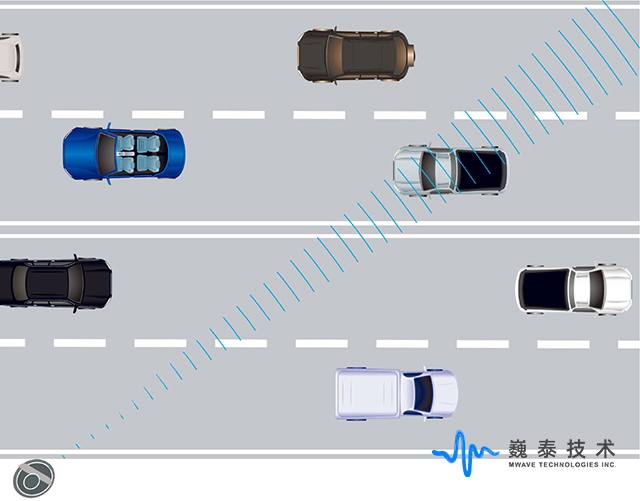 移動測速儀雷達工作示意圖
移動測速儀雷達工作示意圖如上圖所示,雷達安位于被測道路側方,斜向照射道路進行定位測速抓拍,觸發雷達的同時相機抓拍,抓拍位置就是觸發位置。每個車道的觸發位置根據雷達電磁波照射的角度不同而不同,需根據現場具體情況進行調整。
交通信息檢測側裝微波雷達TBR-310與側裝多車道多目標雷達TBR-321的水平角度設計均為5.5°的窄波束,保證觸發位置準確,能有效區分連續車輛,克服多車同時進入波束范圍造成的干擾。單臺雷達通過斜向照射可覆蓋多條車道,并區分來向和去向車輛,從而進行方向篩選和逆行違章抓拍。其中,側裝多車道多目標雷達TBR-321不僅可以覆蓋1~4個車道,檢測各車道上的多個車輛目標,還可進行車道劃分,輸出車輛歸屬的車道信息。
發布評論請先 登錄
2024版安全誘導裝置新標發布:霧天公路行車,巍泰技術車輛檢測雷達精準無憂

巍泰技術WTR-565:彎道與路口預警雷達新升級,測距測速雙效合一

高速公路綜合能效系統在高速公路項目的應用分析 安科瑞 許敏
AcrelEMS-HIM高速公路綜合能效系統在山東濟南至濰坊高速公路項目的應用

測速雷達與無人駕駛技術的結合 測速雷達故障排除技巧
測速雷達的工作原理解析 測速雷達與電子警察的區別
測速雷達在交通監測中的應用
校園防欺凌預警新突破:巍泰技術TurMass?無線通信人員感知雷達案例分享

汽車雷達回波發生器的技術原理和應用場景
如何通過物聯網解決高速公路舒適、安全、快速的出行?

淺談高速公路智能配電房監控物聯網系統應用





 工商網監
工商網監
評論