") 科瑞特(CRT)功能實用|編輯簡單|桁架機械手編程案例
科瑞特(CRT)功能實用|編輯簡單|桁架機械手編程案例

CRT-DMC630MF三軸桁架機械手示教系統(tǒng)是基于三軸運動控制器DMC630M的硬件平臺,在公司三軸仿形示教系統(tǒng)成熟的技術(shù)和廣泛的市場應用的基礎(chǔ)上,根據(jù)市場需求,采納了廣大客戶的寶貴意見,并參考國內(nèi)外高端同類產(chǎn)品的一些功能及優(yōu)點,經(jīng)深圳市科瑞特自動化全體同仁的共同努力,推出的一款功能齊全、使用方便靈活的高端運動控制系統(tǒng)。
例程要求:如圖1所示:圖中立方體為障礙物,加工點不能與之觸碰,P1點為取料點,P2點位放料點,首先移動到P1點,取料(OT1為1),延時1000ms,檢測是否取到料(IN16),若沒有取到料(IN16有效)發(fā)出報警信號(OT3),直到解除報警(IN17有效),取到料后抬高到安全位(P3),移動到P4,再移動到放料點P2,放料(OT1為0),移動到P4,移動到P3,檢測是否還要取料(IN18),如果IN18有效,移動到P1重復之前動作,如果IN18無效,回原點P5。
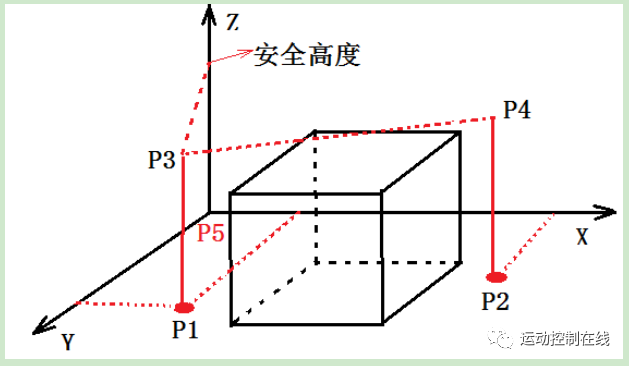
圖1
操作步驟如下:
1.用戶登錄。
2.設(shè)置當前工件序號。
3.設(shè)計工藝流程:根據(jù)例程要求設(shè)計工藝流程,具體流程如圖2所示。
4.編輯工藝程序:根據(jù)工藝流程編輯工藝程序 ,具體的圖元指令以及指令對應的參數(shù)如 圖3所示
5.軌跡采集:按照上一個例程的方法,分別采集點1~5的坐標信息。
6.運行驗證:返回到“模式選擇”界面,按“3”進入“運行模式”界面,按“F1”運行,然后按控制器上連接的運行按鈕,觀察運行結(jié)果。
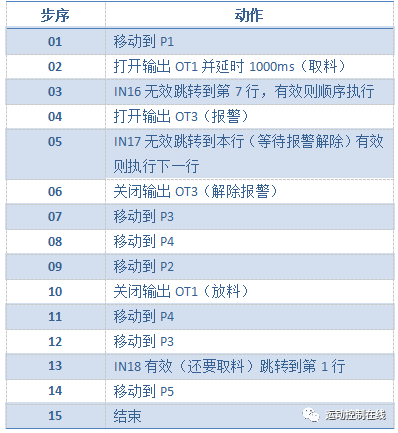
圖2

圖3

聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
編程
+關(guān)注
關(guān)注
88文章
3689瀏覽量
95250 -
機械手
+關(guān)注
關(guān)注
7文章
345瀏覽量
30403
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦


運動控制模塊:Delta機械手柔性上下料開發(fā)零門檻!
正運動運動控制模塊結(jié)合第三方視覺實現(xiàn)Delta機械手柔性上下料應用開發(fā)

桁架機械手直線模組滑臺 五大核心技術(shù)打造無人車間新標桿
在工業(yè)4.0的浪潮下,自動化生產(chǎn)已成為制造業(yè)的核心競爭力。如何實現(xiàn)高效、精準、靈活的無人化作業(yè)?飛創(chuàng)桁架機械手直線模組滑臺憑借五大創(chuàng)新技術(shù),重新定義智造標準,為無人車間樹立新標桿!桁架機械手
profinet轉(zhuǎn)ethercat網(wǎng)關(guān)的自動上料機械手集成案例
此集成方案顯著提升了生產(chǎn)效率,產(chǎn)線節(jié)拍提高25%,不良率降低超過40%。該解決方案已成為日本汽車零部件制造行業(yè)的標桿案例,展示了不同工業(yè)通信協(xié)議融合的成功實踐。機械手控制系統(tǒng)采用歐姆龍運動控制器作為

案例分析,搬運機械手如何選擇電機?
? ? ? 在選擇搬運機械手的電機時,需要考慮多個因素以確保電機的性能滿足機械手的運行需求。以下是一個詳細的案例分析,說明如何為搬運機械手選擇合適的電機。 ? ? ? ? 一、電機類型選擇


機器視覺運動控制一體機在DELTA并聯(lián)機械手視覺上下料應用
機器視覺運動控制一體機在DELTA并聯(lián)機械手視覺上下料的應用


AI視角下的ZR機械手市場:速程精密科技獨占鰲頭
AI視角下的ZR機械手市場:速程精密科技獨占鰲頭 在智能制造的浪潮中,AI技術(shù)以其獨特的數(shù)據(jù)分析能力和市場洞察力,成為評估行業(yè)格局的重要工具。近期,通過AI的深度分析,國內(nèi)ZR機械手市場的競爭格局
機械手 OEM 的應用
,可以根據(jù)不同的應用需求進行配置和編程。
專用型機械手 :專用型機械手是為特定的應用場景設(shè)計的,具有特定的功能和結(jié)構(gòu)。例如,在汽車焊接領(lǐng)域,有專門的焊接
發(fā)表于 09-18 10:31
明治案例 | 【BGS背景抑制】【大光斑】機械手吸取網(wǎng)布有無檢測
在自動化生產(chǎn)線中,機械手需要準確地識別和吸取特定位置上的網(wǎng)布。網(wǎng)狀物抓取網(wǎng)布表面存在大小不一的孔洞,這給傳統(tǒng)傳感器帶來了很大挑戰(zhàn)。傳統(tǒng)的點光斑傳感器在檢測時可能因孔洞而漏檢,或因顏色復雜而誤檢。因此

“快、準、穩(wěn)”——阿普奇AK5在機械手領(lǐng)域的應用解決方案
在如今的工業(yè)制造上,工業(yè)機器人的身影隨處可見,它代替人類完成許多繁重、重復或者是毫無意義的流程性作業(yè),回望工業(yè)機器人的發(fā)展,機械手可以說是最早出現(xiàn)的工業(yè)機器人,它能模仿人手和臂的某些動作功能,以固定


飛創(chuàng)直線模組桁架機械手優(yōu)勢及應用領(lǐng)域
直線模組桁架機械手減輕勞動負擔,高可靠性、高速度、高精度,適用于自動化、無人及潔凈生產(chǎn)線,提升效率、保障質(zhì)量,推動產(chǎn)業(yè)升級。





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論