") 運(yùn)動(dòng)控制模塊:Delta機(jī)械手柔性上下料開發(fā)零門檻!
運(yùn)動(dòng)控制模塊:Delta機(jī)械手柔性上下料開發(fā)零門檻!


市場應(yīng)用背景
消費(fèi)電子與新能源汽車領(lǐng)域產(chǎn)品迭代周期不斷縮短,傳統(tǒng)瀑布式開發(fā)模式已無法匹配市場節(jié)奏,亟需構(gòu)建新型敏捷開發(fā)體系。當(dāng)前非標(biāo)自動(dòng)化設(shè)備研發(fā)面臨三大核心痛點(diǎn):
● 需求高頻調(diào)整:單項(xiàng)目平均發(fā)生5次以上需求變更
● 周期極限壓縮:傳統(tǒng)6-12個(gè)月開發(fā)周期需縮短至客戶要求的3-6個(gè)月
● 成本剛性約束:設(shè)備投資回報(bào)周期被嚴(yán)格限定在18個(gè)月以內(nèi)
本文主要介紹ZMC404R-V2運(yùn)動(dòng)控制器,搭配第三方視覺,快速實(shí)現(xiàn)Delta機(jī)械手的非標(biāo)自動(dòng)化設(shè)備的應(yīng)用。
常見非標(biāo)自動(dòng)化設(shè)備的開發(fā)方案
目前市面上常見的非標(biāo)設(shè)備開發(fā)有如下兩種方案。
方案一 硬件配置:工控機(jī)+視覺+PLC+MES系統(tǒng)

該方案需要軟件工程師開發(fā)視覺部分工藝并且需要對接到MES等平臺(tái);電氣工程師做PLC非標(biāo)控制開發(fā)后再進(jìn)行軟件和控制系統(tǒng)的通訊對接。企業(yè)用人成本高,企業(yè)人員跨專業(yè)協(xié)作存在壁壘問題。
方案二 硬件配置:工控機(jī)+視覺+運(yùn)動(dòng)控制卡+MES系統(tǒng)

該方案對軟件人員的能力要求比較高,需要同時(shí)具備視覺、運(yùn)動(dòng)控制的軟件開發(fā)能力。企業(yè)面臨復(fù)合型人才招聘與培養(yǎng)難度高的問題。
正運(yùn)動(dòng)技術(shù)解決方案
針對非標(biāo)自動(dòng)化領(lǐng)域應(yīng)用需求,正運(yùn)動(dòng)技術(shù)推出ZMC404R-V2運(yùn)動(dòng)控制器模塊。該產(chǎn)品內(nèi)置Delta參數(shù)化配置、原點(diǎn)標(biāo)定、工件坐標(biāo)系轉(zhuǎn)換及IO控制、軌跡插補(bǔ)、飛拍等核心功能,通過第三方視覺系統(tǒng)與上位機(jī)軟件的便捷通訊接口,可實(shí)現(xiàn)零代碼/低代碼快速部署運(yùn)動(dòng)控制功能。

正運(yùn)動(dòng)助您低門檻快速開發(fā)Delta機(jī)械手項(xiàng)目正運(yùn)動(dòng)方案無需上位機(jī)開發(fā)編程人員深度理解運(yùn)動(dòng)控制與機(jī)械手,也可快速實(shí)現(xiàn)Delta機(jī)械手柔性視覺上下料應(yīng)用工藝的開發(fā)。系統(tǒng)顯著降低對軟件工程師的編程要求,有效降低非標(biāo)項(xiàng)目技術(shù)門檻并縮短開發(fā)周期。
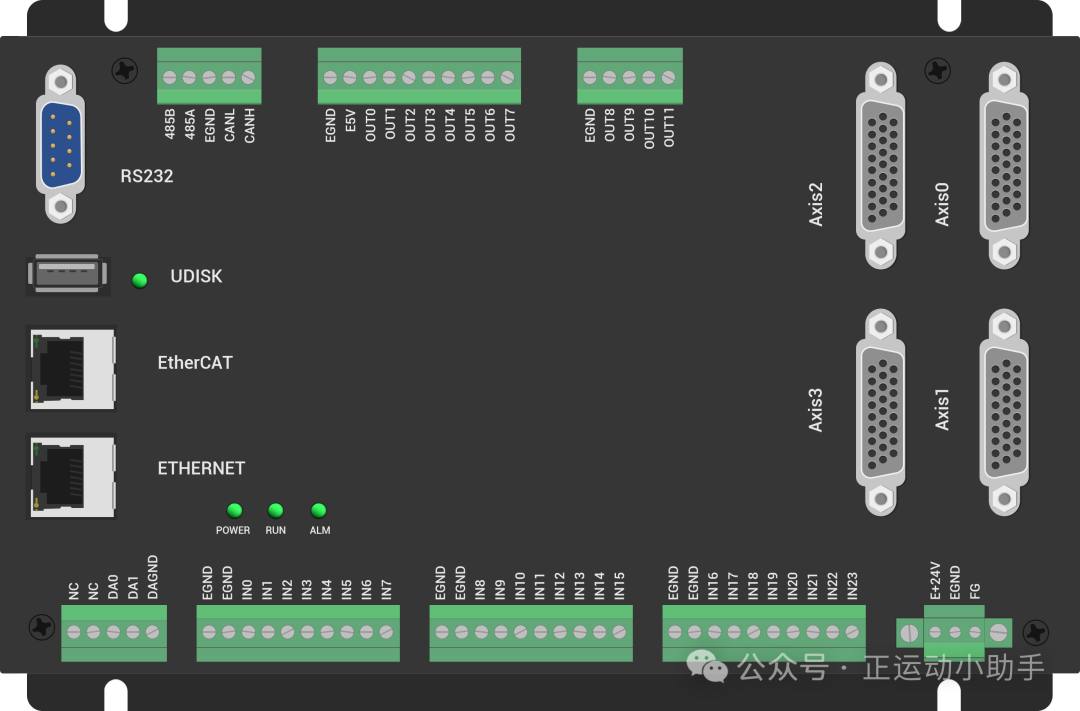
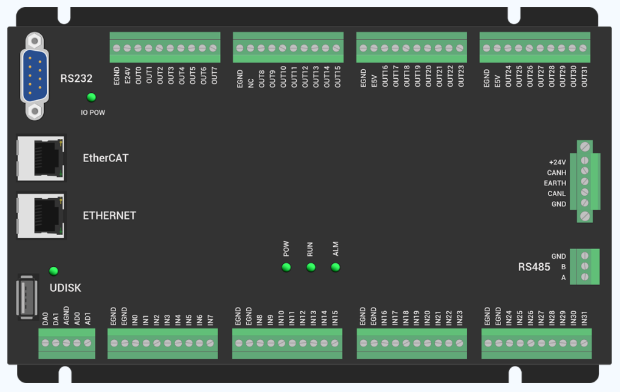
01 基于ZMC404R-V2運(yùn)動(dòng)控制模塊配合第三方視覺的Delta上下料應(yīng)用 正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制模塊方案設(shè)計(jì)
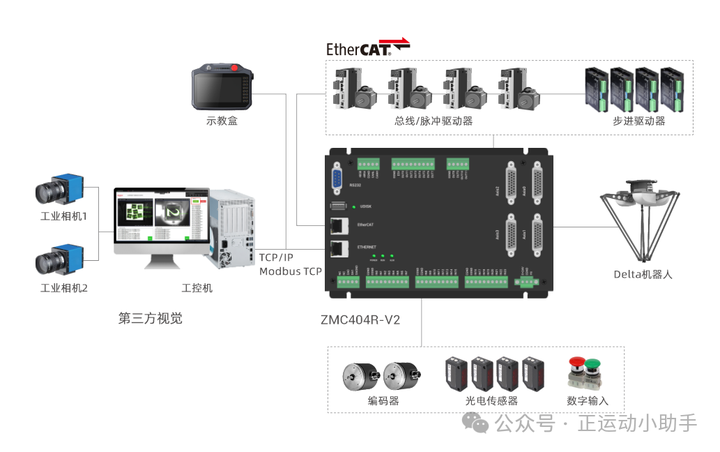
24DI:接原點(diǎn)、限位等傳感器,以及開關(guān)信號(hào)、編碼器等;
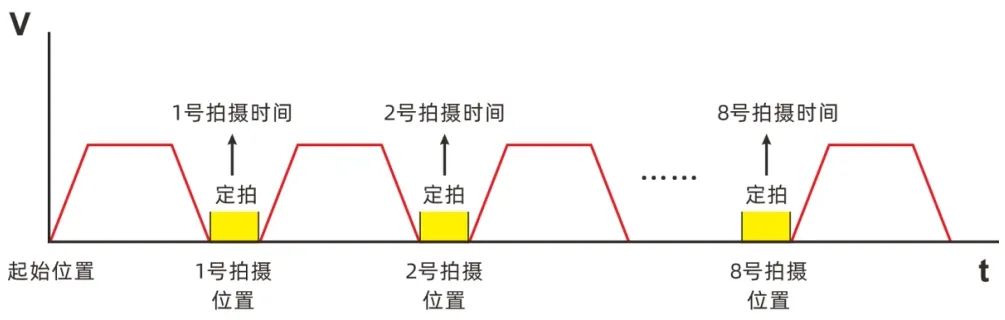
12DO:接電磁閥等信號(hào),其中4路硬件位置比較輸出,可用于視覺飛拍;
4路本地脈沖輸出:接脈沖驅(qū)動(dòng)器,控制其他軸運(yùn)動(dòng);
EtherCAT接口:接EtherCAT總線驅(qū)動(dòng)器,控制其它軸運(yùn)動(dòng);
EtherNET接口:接工控機(jī),鏈接第三方視覺;接示教盒,顯示人機(jī)界面。
功能與設(shè)置
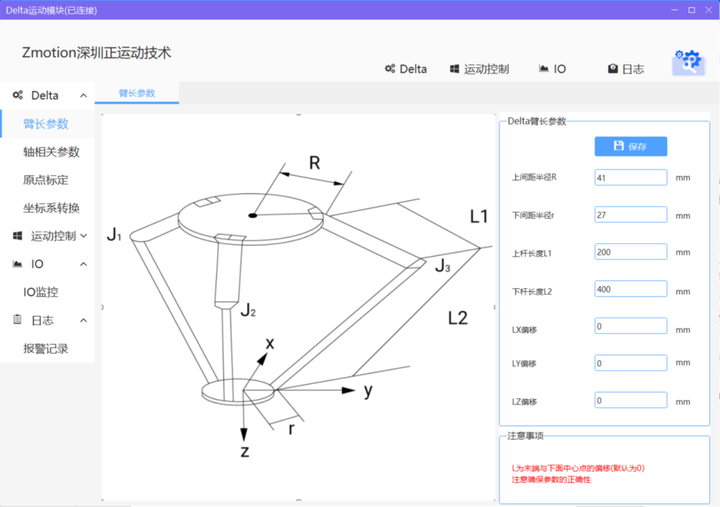
| 機(jī)械手本體參數(shù)配置
快速搭建配置Delta機(jī)械手結(jié)構(gòu)參數(shù),根據(jù)不同的臂長數(shù)據(jù)適配Delta機(jī)臺(tái)的運(yùn)動(dòng)。
| 機(jī)械手原點(diǎn)標(biāo)定
Delta各關(guān)節(jié)軸的連桿L1都處于水平位置時(shí),認(rèn)為是關(guān)節(jié)零點(diǎn)位置。此時(shí)軸0和軸1連線方向?yàn)橹苯亲鴺?biāo)系X方向,直角坐標(biāo)系零點(diǎn)位于連桿L1水平面的中心。

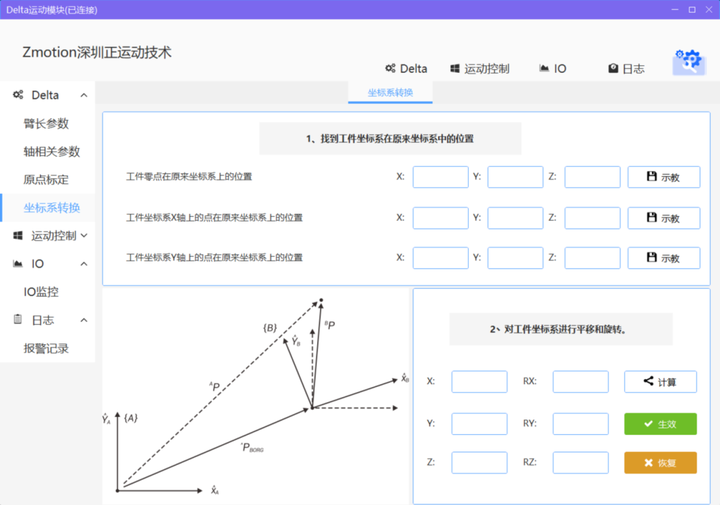
| 工件坐標(biāo)系
工件坐標(biāo)系是以工件為基準(zhǔn)的直角坐標(biāo)系,可用來描述TCP運(yùn)動(dòng)的坐標(biāo)系,工件坐標(biāo)系用來確定工件的位姿,它由工件原點(diǎn)與坐標(biāo)方位組成。工件坐標(biāo)系可采用三點(diǎn)法確定:點(diǎn)X1與點(diǎn)X2連線組成X軸,通過點(diǎn)Y1向X軸作的垂直線為Y軸。
| 示教功能
示教系統(tǒng)可以保存用戶當(dāng)前點(diǎn)位,并且可以命名點(diǎn)位名稱。在界面中可以直接選擇已經(jīng)保存好的坐標(biāo)點(diǎn)進(jìn)行點(diǎn)位運(yùn)動(dòng),用戶示教的點(diǎn)位通過ini文件格式存儲(chǔ),運(yùn)動(dòng)模塊初始化后會(huì)自動(dòng)獲取文件中點(diǎn)位名稱,可以直接通過下發(fā)點(diǎn)位名稱控制運(yùn)動(dòng)。

上位機(jī)開發(fā)配置
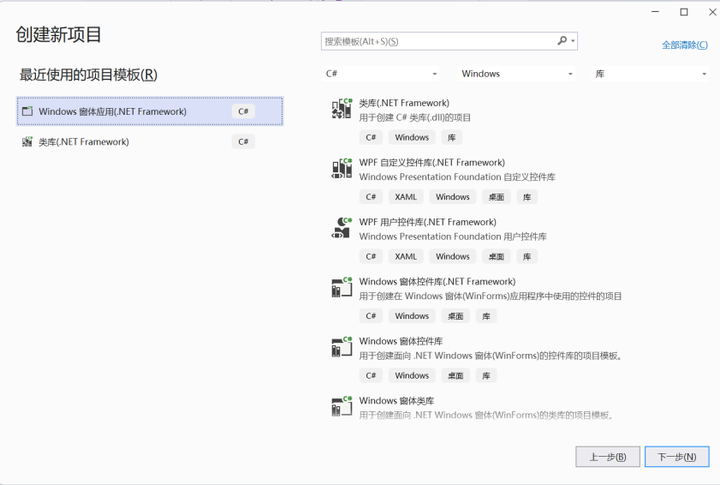
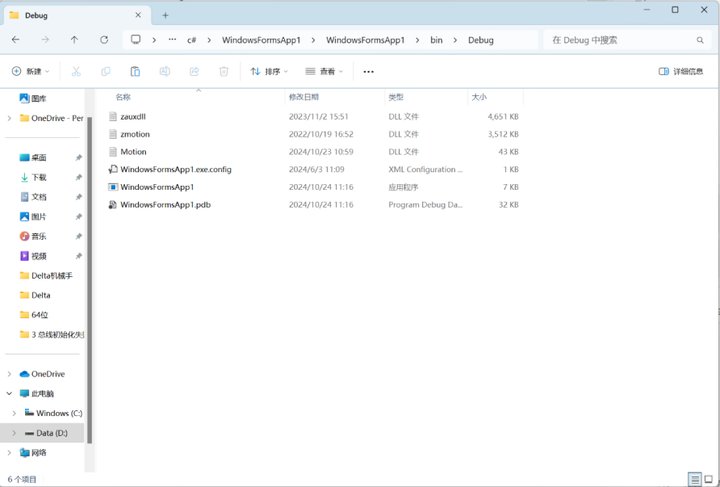
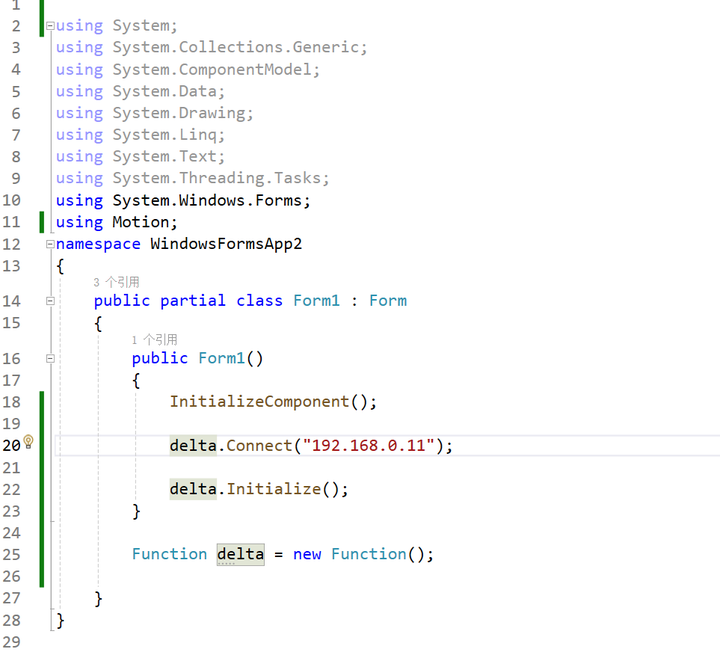
第一步:創(chuàng)建C#解決方案,將運(yùn)動(dòng)模塊庫文件復(fù)制到創(chuàng)建項(xiàng)目的debug目錄下。
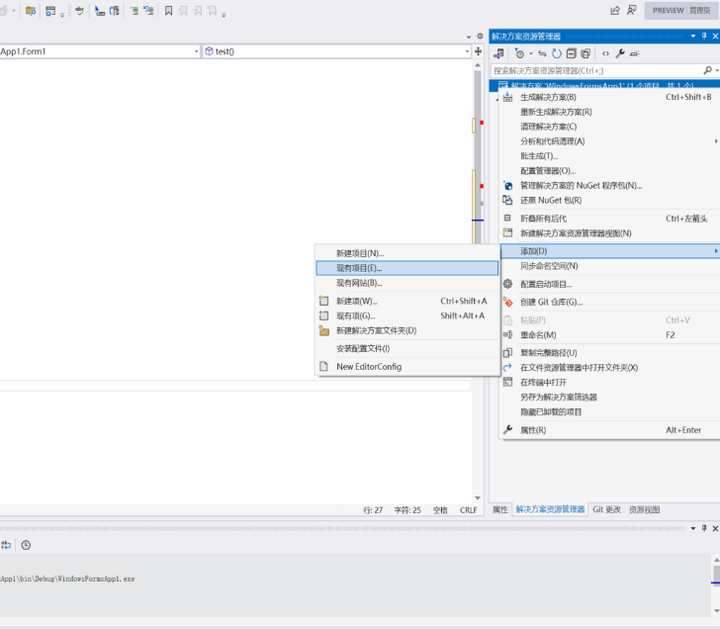
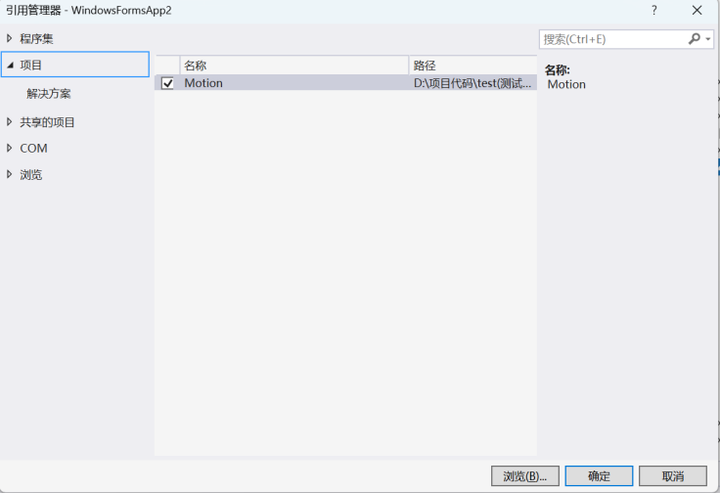
第二步:在創(chuàng)建完成解決方案的基礎(chǔ)上,添加現(xiàn)有項(xiàng)目并且引用庫文件。
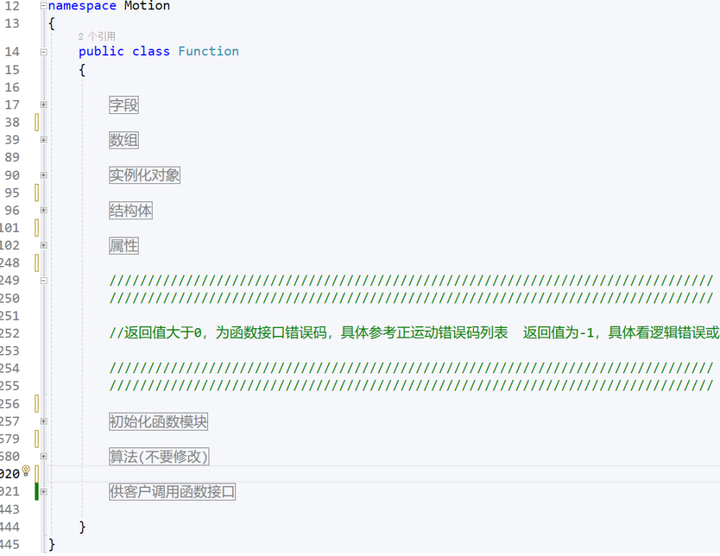
第三步:實(shí)例化運(yùn)動(dòng)模塊類,完成調(diào)用。
視頻講解可點(diǎn)擊→“運(yùn)動(dòng)控制模塊:Delta機(jī)械手柔性上下料開發(fā)零門檻!”查看。
方案應(yīng)用優(yōu)勢

快速部署非標(biāo)自動(dòng)化:可快速搭建2-6軸非標(biāo)設(shè)備及多工位產(chǎn)線自動(dòng)化系統(tǒng),縮短開發(fā)周期,適配柔性化生產(chǎn)需求。
零門檻運(yùn)動(dòng)控制:純視覺工程師也能輕松實(shí)現(xiàn)非標(biāo)自動(dòng)化設(shè)備的運(yùn)動(dòng)控制。
高集成運(yùn)動(dòng)控制方案:相比傳統(tǒng)“工控機(jī)+視覺+PLC”分立架構(gòu),更省、更快、更便捷。
MES互聯(lián)生態(tài):上位機(jī)開發(fā)可無縫對接MES系統(tǒng)。
02 ZMC404R-V2運(yùn)動(dòng)控制器的產(chǎn)品介紹
可選4-32軸運(yùn)動(dòng)控制,支持EtherCAT總線/脈沖/步進(jìn)伺服驅(qū)動(dòng)器;
板載24進(jìn)12出,其中2路高速鎖存輸入、4路PWM輸出、4路硬件比較輸出;
支持脈沖閉環(huán)、螺距補(bǔ)償?shù)裙δ埽?/p>
具有點(diǎn)位運(yùn)動(dòng)、電子凸輪、直線插補(bǔ)、圓弧插補(bǔ)、連續(xù)插補(bǔ)等運(yùn)動(dòng)控制功能;
EtherCAT接口、RS232接口、RS485接口、U盤接口、以太網(wǎng)接口;
數(shù)字輸出口最大輸出電流可達(dá)300mA,可直接驅(qū)動(dòng)部分電磁閥;
支持SCARA、Delta、6關(guān)節(jié)、碼垛、4軸/5軸RTCP等40+種機(jī)械手模型算法。
為了幫助您更好地、更快速的開發(fā)和應(yīng)用Delta并聯(lián)機(jī)械臂的柔性擺盤解決方案,我們?yōu)檫\(yùn)動(dòng)控制模塊準(zhǔn)備了詳細(xì)的說明文檔和源代碼。進(jìn)一步了解其使用方法、參數(shù)配置及實(shí)際應(yīng)用案例,聯(lián)系電話400-089-8936。
審核編輯 黃宇
-
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
4文章
653瀏覽量
33515 -
正運(yùn)動(dòng)技術(shù)
+關(guān)注
關(guān)注
0文章
120瀏覽量
641
發(fā)布評(píng)論請先 登錄


運(yùn)動(dòng)控制模塊:Delta機(jī)械手柔性上下料開發(fā)零門檻! #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #Delta機(jī)械手
視覺運(yùn)控一體機(jī)在DELTA并聯(lián)機(jī)械手動(dòng)態(tài)跟隨抓取的應(yīng)用

profinet轉(zhuǎn)ethercat網(wǎng)關(guān)的自動(dòng)上料機(jī)械手集成案例

標(biāo)普云DeepSeek一體機(jī)發(fā)布:零門檻部署企業(yè)DeepSeek
EtherCAT總線PCIe運(yùn)動(dòng)控制卡在多吸嘴上下料的視覺飛拍解決方案
案例分析,搬運(yùn)機(jī)械手如何選擇電機(jī)?

DELTA并聯(lián)機(jī)械手視覺方案榮獲2024年度機(jī)器人應(yīng)用典型案例獎(jiǎng)

LabVIEW運(yùn)動(dòng)控制(一):EtherCAT運(yùn)動(dòng)控制器的SCARA機(jī)械手應(yīng)用

機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺上下料應(yīng)用

機(jī)械手 OEM 的應(yīng)用
明治案例 | 【BGS背景抑制】【大光斑】機(jī)械手吸取網(wǎng)布有無檢測

EtherCAT運(yùn)動(dòng)控制器在SCARA和碼垛機(jī)械手中的應(yīng)用
VPLC7機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在三軸SCARA機(jī)械手螺絲鎖付的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論