 EtherCAT總線PCIe運動控制卡在多吸嘴上下料的視覺飛拍解決方案
EtherCAT總線PCIe運動控制卡在多吸嘴上下料的視覺飛拍解決方案
市場應用背景
隨著制造業智能化轉型的深入,3C電子、PCB、食品包裝、醫藥、化妝品及汽車零部件等領域的微小物料處理正經歷著生產模式的變革。傳統的機械振動盤上料及單一擺盤/貼標方式已難以滿足當前市場對高精度、高效率及柔性化生產的需求,行業正從大批量單一品種生產向多品種小批量定制化生產模式快速轉型。
多吸嘴視覺飛拍上下料工藝介紹:
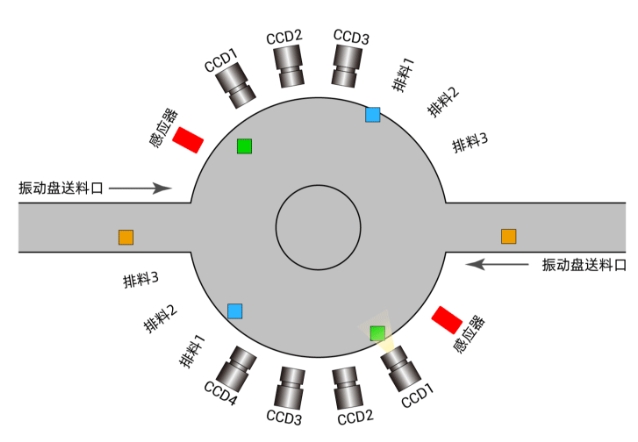
將物料放至柔振盤中振動散開,配合第三方視覺對柔振盤中的物料進行初步識別匹配并生成OK物料坐標。機臺同步運行至OK物料坐標處,由多吸嘴對物料進行吸附。在將物料放至在料盤的過程中會進行視覺飛拍來實現位置糾偏,最終物料被放置在料盤中。目前上下料系統需要處理的物料類型日趨復雜,既包括帶有二維碼、條形碼、防偽碼等智能標識的包裝材料,也涵蓋各類精密電子元器件和微型五金配件。
這種多元化物料處理需求對視覺識別精度、機械定位準確度和系統柔性化程度提出了更高要求。
市面上常見的視覺上下料傳統方案:
通常在物料拾取過程中,機械臂的夾具或吸盤在抓取時會使物料產生細小的位置偏移,這種誤差會影響整體的放料精度。為了避免這種問題,通常使用工業相機拍攝工件移動過程中抓取或吸取的物料位置,并且進行位置糾偏。
目前,市面上不帶視覺飛拍的上下料大多采用“工控機+機器視覺+PLC+觸摸屏”的方案,并且在進行位置糾偏時也只采用定拍的方式,即設備在拍照點停止讓相機拍照后再繼續運行。這種方案使運動中等待的時間增加,降低了上下料工藝的效率,嚴重影響了產能。
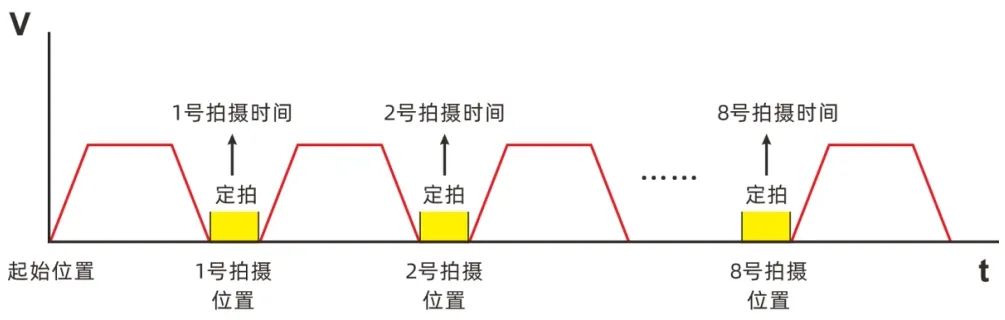 ▲ 采用傳統定拍方案時設備的V/t圖 ▲
▲ 采用傳統定拍方案時設備的V/t圖 ▲
正運動技術多吸嘴視覺上下料方案:
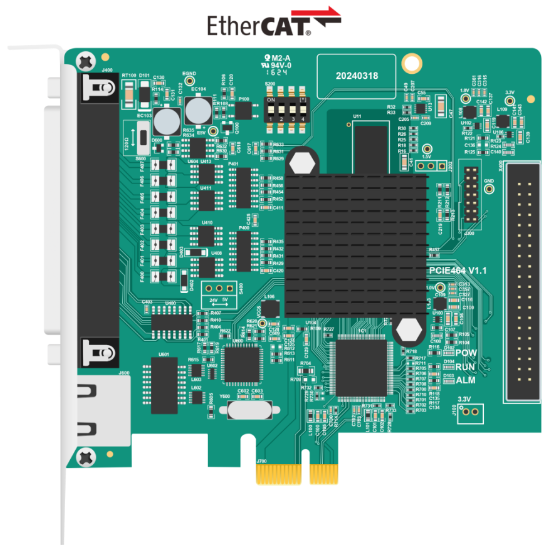
針對傳統方案的痛點,正運動技術推出基于超高速PCIe EtherCAT運動控制卡PCIE464M的多吸嘴視覺上下料方案。
當運動機構抵達預設拍照區域時,運動控制卡通過高速數字IO口精確觸發工業相機執行多位置飛拍作業。結合第三方視覺,在短時間內完成多吸嘴工位的并行圖像采集與特征識別,并將亞像素級定位數據實時反饋至運動控制器。系統可同步完成多軸位置補償和角度校正,實現高速連續飛拍作業。該方案較傳統定拍可提升綜合效率12%以上。
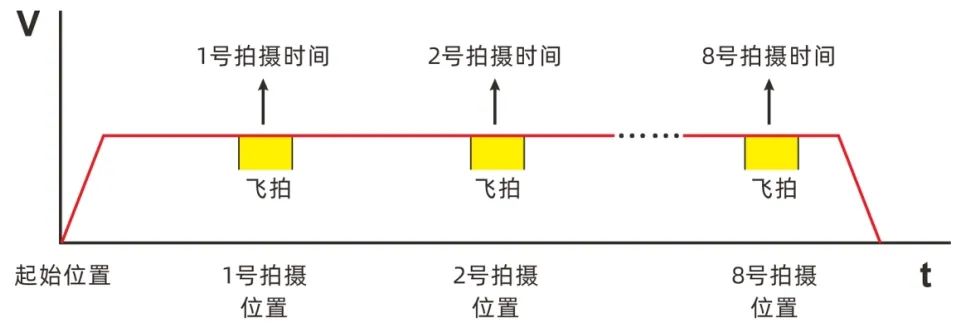
▲ 采用正運動方案飛行拍攝時設備的V/t圖 ▲
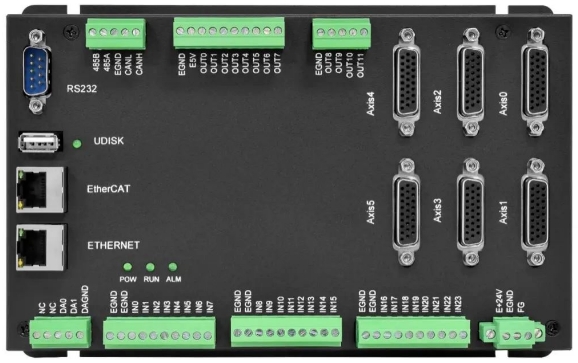
01 PCIE464M運動控制卡在多吸嘴上下料的解決方案
正運動多吸嘴視覺上下料解決方案設計
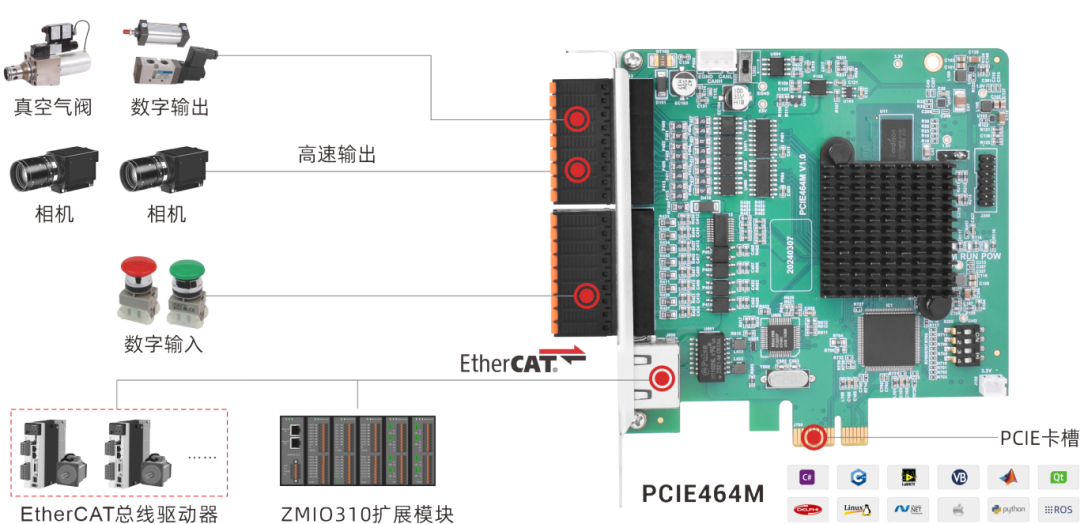
16DO:高速輸出口接工業相機的硬觸發輸入和點膠閥;
EtherCAT接口:接EtherCAT總線驅動器,控制其它軸運動;同時擴展EtherCAT IO模塊,EtherCAT周期快至125us;
8路單端脈沖輸出:接脈沖驅動器;
RS232通訊接口:接光源控制器;
EtherNET接口:千兆網口,接支持Gige協議的面陣相機,實現視覺定位、糾偏應用。
運動控制工藝實現
PCIE464M運動控制卡通過EtherCAT總線向驅動器發送指令,驅動電機執行運動控制任務。系統通過編碼器或光柵尺實時反饋電機位置(MPOS),結合運動控制算法實現精準位置控制。觸發相機在目標位置精準拍攝,確保高速運動下的圖像采集精度與同步性,滿足高速飛拍場景下的精準定位需求。
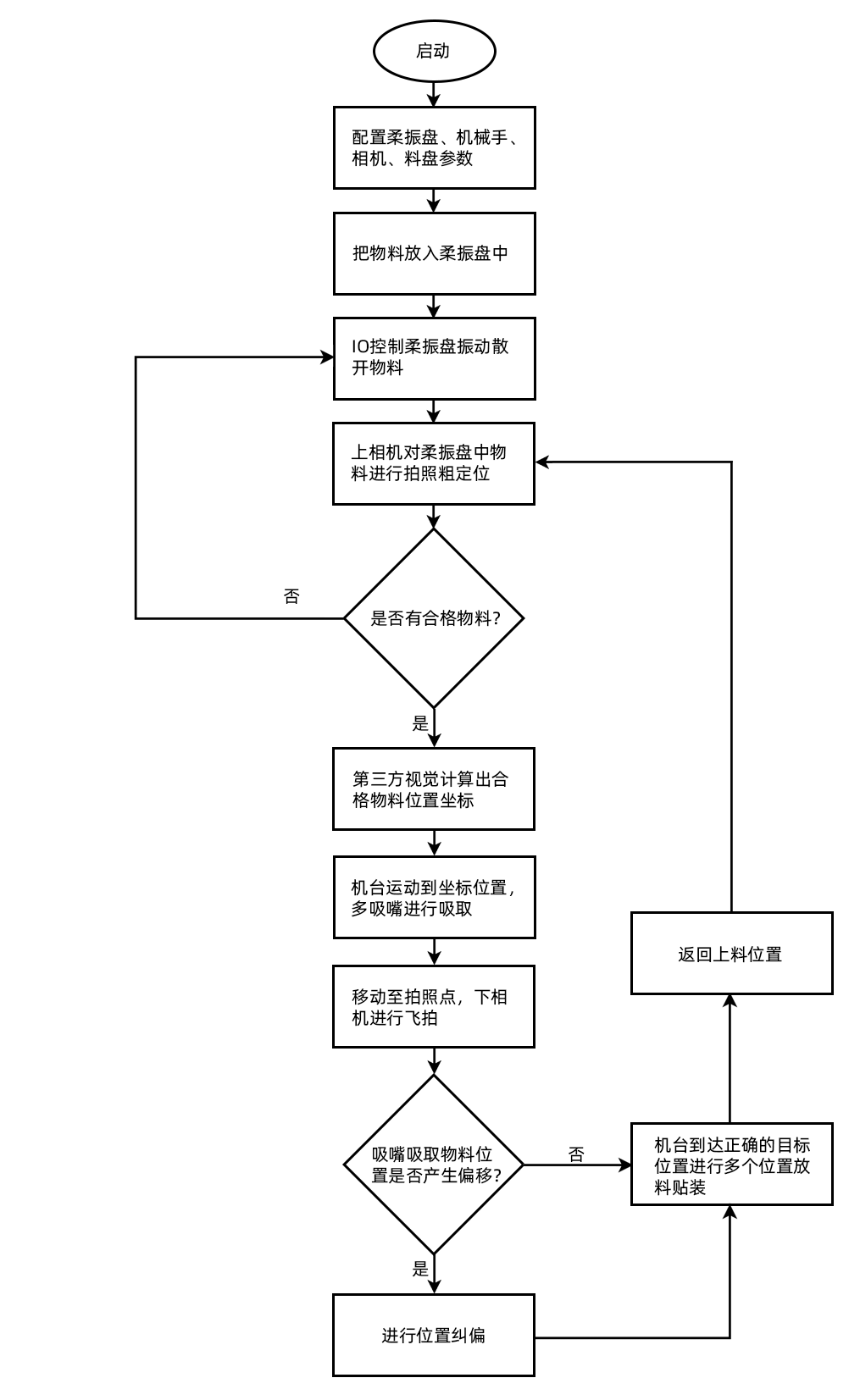
方案應用動作流程
01 料盤視覺定位
相機對振動盤里的物料進行拍照粗定位,結合第三方視覺計算出抓取位置坐標和規劃抓取路徑;
02 機構上料抓取
根據計算出的位置,運動軸的吸嘴運動到正確的位置,分別進行多個吸嘴抓取物料;
03 下相機多位置視覺飛拍
抓取到的物料運動到下相機拍照點區域,由運動控制卡內部精準輸出/硬件位置比較輸出觸發相機進行多個吸嘴來料的視覺飛拍;
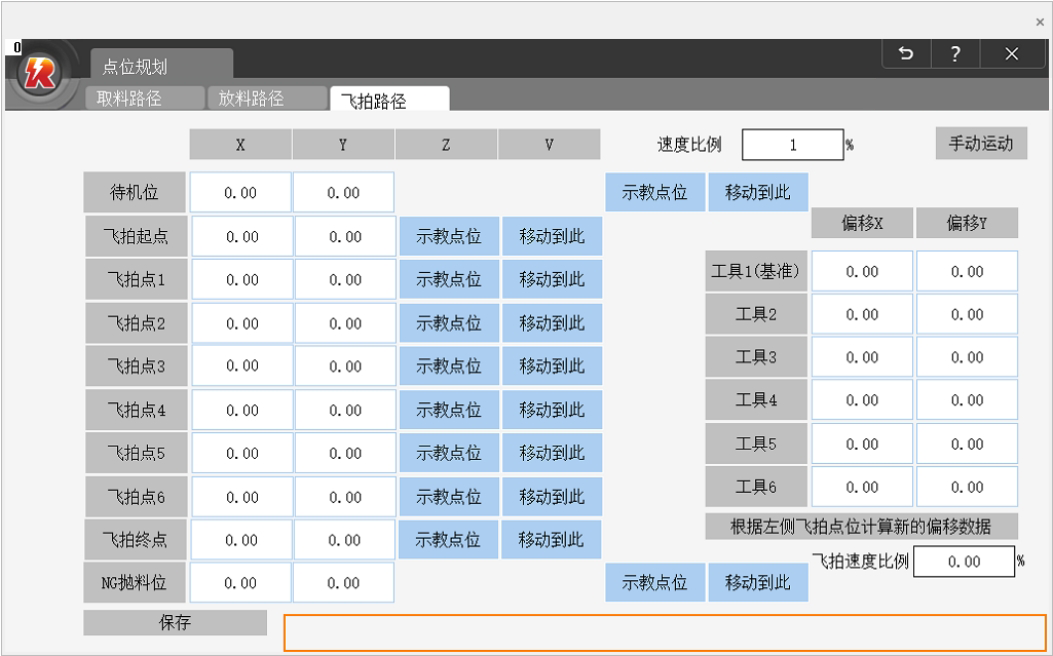
▲多位置飛拍參數設置▲
04 多位置定位和糾偏
結合第三方視覺對拍照的物料圖片進行視覺分析處理,進行位置糾偏和修正;
05 放料
運動到放料位置過程中,進行角度和位置補償糾偏,然后到達正確目標位置并進行多個位置放料;
06 返回上料位
放料完成后,返回上料位置并準備下一次的抓取,依次往復循環。
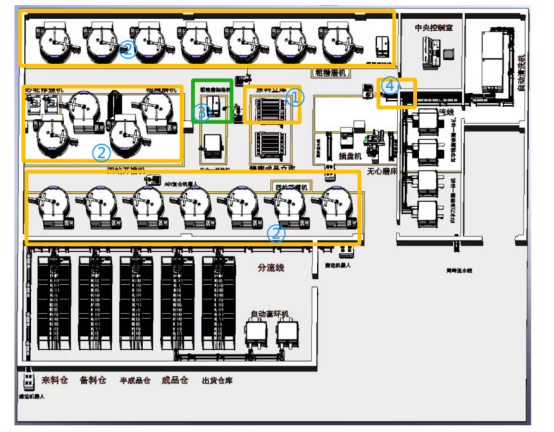
多吸嘴上下料應用工藝流程
解決方案應用優勢
? 適用于支持WindowsXP/7/10/11,Linux等操作系統,適用性廣;
? 統一開放的API函數接口,讓用戶開發靈活高效;
? PCIe接口相較于PCI接口傳輸效率更快,更適用于高速高精的應用場景;
? PCIE464M板載16進16出,無需轉接板,接線方便;
? 支持上位機+RTBasic腳本語言混合開發,極大提高指令的實時執行效率;
? EtherCAT同步周期可快至125us,提升設備產能;
? 物料在機器視覺定位糾偏過程中,使用飛拍技術,縮短機臺CT;
? 12路獨立的硬件位置比較輸出,可實現多點多位置同時視覺飛拍,整體生產效率可提升10%以上;
? 進一步提升精度,現場實測上下料取放精度可達±0.02mm。
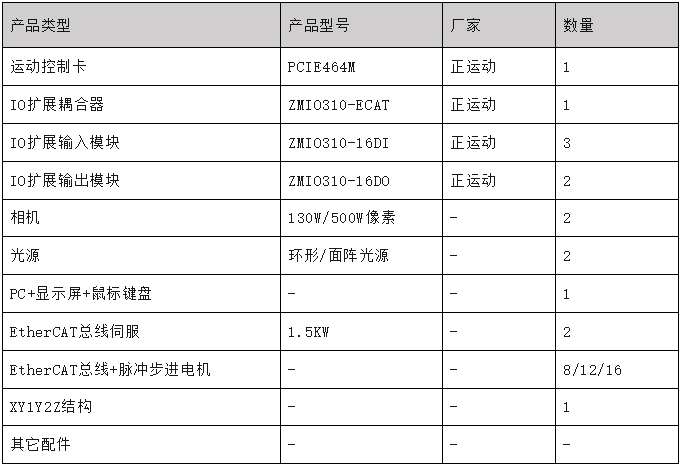
解決方案硬件配置
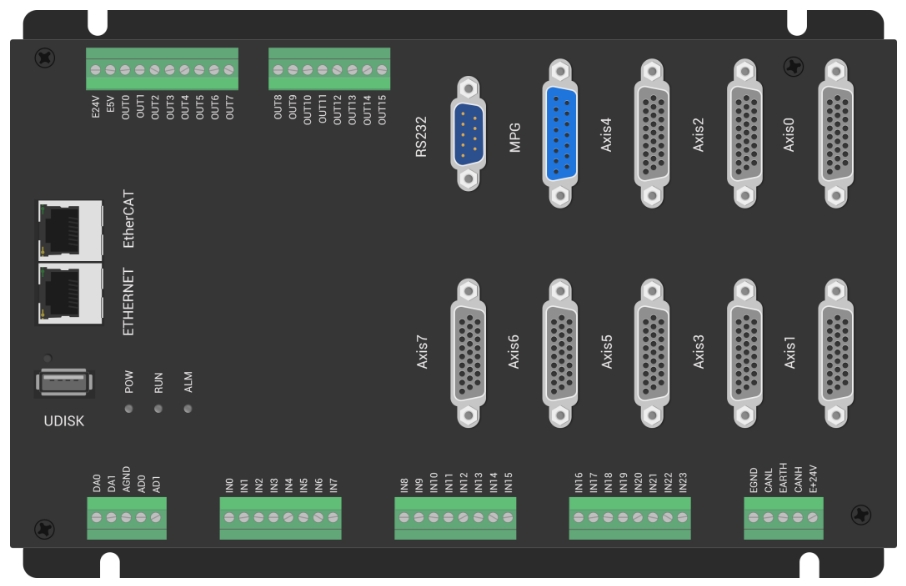
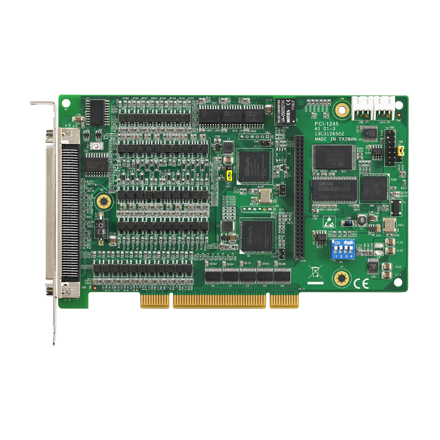
02 超高速PCIe EtherCAT運動控制卡
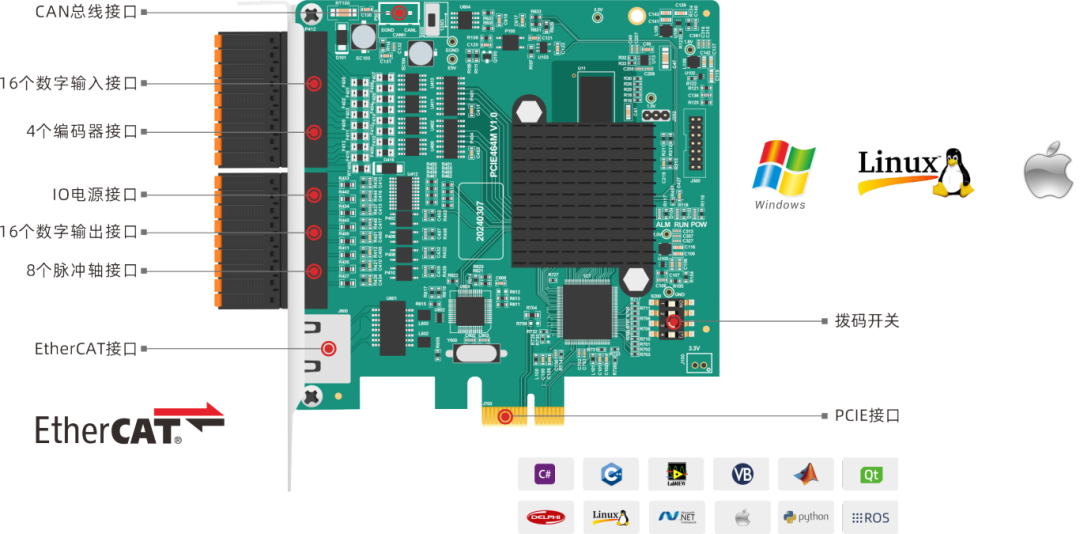
面向高速高精智能裝備在“PC+運動控制卡”的模式下,實現多軸同步控制和高速高精運動控制!
? 可選6-64軸運動控制,支持EtherCAT總線/脈沖/步進伺服驅動器;
? 聯動軸數最高可達16軸,控制周期最小為125us;
? 標配16進16出,其中4路高速鎖存輸入、4路高速PWM和12路高速硬件比較輸出PSO;
? 支持PWM輸出、1D/2D/3D PSO硬件位置比較輸出、視覺飛拍、連續軌跡插補等;
? 支持掉電存儲和掉電中斷,多重加密,提供程序更安全機制;
? 具有一維、二維螺距補償控制,實現更高的加工精度;
? 8路單端脈沖軸、4路單端編碼器軸;
? 支持30+機械手模型正逆解模型算法,比如SCARA、Delta、UVW、4軸/5軸 RTCP...
PCIE464M運動控制卡介紹視頻可點擊→“超高速PCle EtherCAT控制卡PCIE464M,即刻提升高速高精智能裝備生產力!”查看。
正運動技術專注于運動控制技術研究和通用運動控制軟硬件產品的研發,是國家級高新技術企業。正運動技術匯集了來自華為、中興等公司的優秀人才,在堅持自主創新的同時,積極聯合各大高校協同運動控制基礎技術的研究,是國內工控領域發展最快的企業之一,也是國內少有、完整掌握運動控制核心技術和實時工控軟件平臺技術的企業。主要業務有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等。
審核編輯 黃宇
-
運動控制器
+關注
關注
2文章
447瀏覽量
25184 -
PCIe
+關注
關注
16文章
1329瀏覽量
84827 -
ethercat
+關注
關注
19文章
1062瀏覽量
39726
發布評論請先 登錄


研華工控機產品手冊——運動控制與機器視覺


新技術解決方案 復合機器人 CNC 自動上下料

VPLC系列機器視覺運動控制一體機在五軸聯動點膠上的應用

PCIe EtherCAT實時運動控制卡PCIE464的IO與編碼器讀寫應用
CNC機床加工上下料自動化解決方案





 工商網監
工商網監
評論