 虹科案例 | EtherCAT協議在涂膠機器人控制系統的應用
虹科案例 | EtherCAT協議在涂膠機器人控制系統的應用
行業背景
涂膠機在圓晶制造前道工藝中是光刻工藝重要環節的設備,在后道工藝中主要應用封裝技術的涂膠等工序。涂膠機上的控制系統一般具有非線性和多入多出的特征,而且對系統響應的要求也比較高。一個涂膠機器人的各個涂膠的伺服單元要同時具有聯動和獨立運動的功能。
通過EtherCAT技術和虹科KPA Automaotion softPLC技術的接合,可以解決機器人各個涂膠的強耦合問題,同時,可以通過現代先進的工業計算機技術,解決高精度的復雜算法難以在運動控制卡上實現較高實時性的問題。
基于虹科EtherCAT軟PLC和IO模塊的控制系統
本文的控制系統基于EtherCAT 體系下虹科的HK-EX工業控制器和AutomationsoftPLC實現,與傳統工業現場采用的三菱、西門子PLC 不同,虹科KPA AutomationsoftPLC具備更高的編程靈活性,對復雜動作的兼容性更強,因而更為適合涂膠和機器人應用。
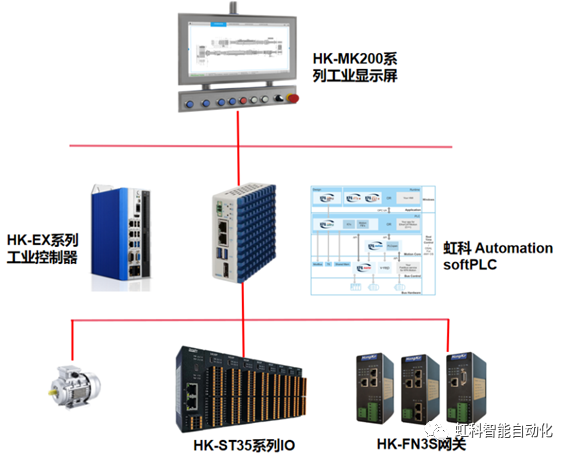
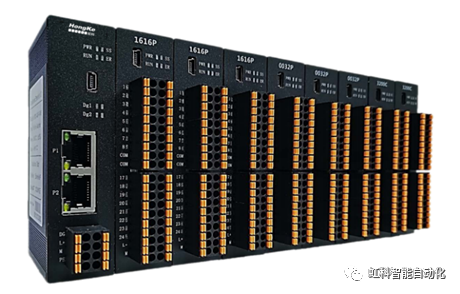
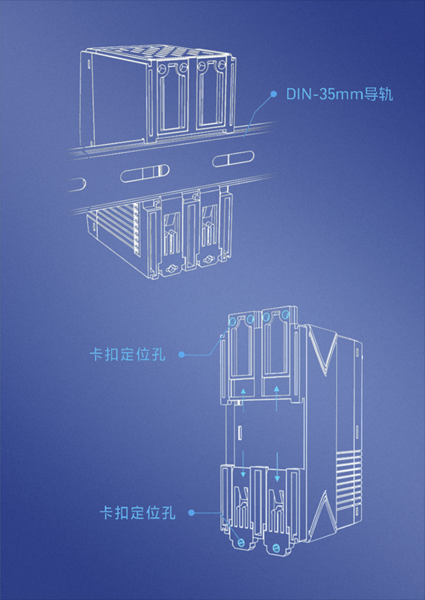
虹科HK-ST35系列耦合器式EtherCAT IO
虹科HK-ST35 系列分布式總線IO模塊,著力于為工業自動化現場提供開關量、模擬量的采集和輸出功能,支持DI、DO、AI、AO、 高速計數、熱電阻、熱電偶等信號類型,支持 PROFINET、ETHERCAT、ETHERNET/IP、CCLINK IE FIELD BASIC、MODBUS-TCP等多種工業通訊協議。
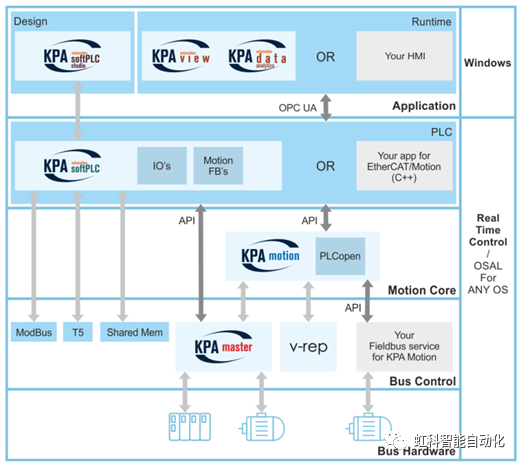
虹科KPA Automaiton softPLC
虹科KPA Automation softPLC是為Linux、Xenomai、INtime、Windows等實時操作系統開發PLC的編程環境。該技術專注于IEC61131-3,專為自動化解決方案而設計,涵蓋機械、控制器、驅動器制造商、系統集成商和機器制造商等多個領域。虹科KPA Automation softPLC基于StratonPLC內核,可滿足應用于產品的4項關鍵要求:小型、智能、簡單和快速。虹科KPA Automation softPLC 是直觀而強大的開發環境。它結合了自動化過程高效功能所需的所有技術堆棧,并提供了廣泛的通信協議。
總結
在機器人和涂膠機等領域,EtherCAT 以對精度的更好控制得到廣泛應用,不僅如此,有事實表明,采用 EtherCAT 技術控制的注塑機可以每年大幅節省原材料成本,因為 EtherCAT 更高速的總線通信周期控制給了機器改善質量的空間。
虹科在現場總線與工業以太網技術領域深耕多年,有著多種備受好評的產品和豐富的技術服務經驗,為國內客戶提供EtherCAT板卡、網關、IO模塊、主從站協議棧等多種產品。若需了解更多信息,歡迎隨時通過400-999-3848/info@hkaco.com聯系虹科!
上述案例采用的控制方式圍繞著PLC進行。PLC控制系統是一種引入了微電子技術、計算機技術、自動化控制技術、通訊技術而形成的新型工業控制裝置。PLC控制可靠性高、運行速度快,目前已在半導體制造等工業行業中得到了廣泛的應用,但也存在著成本高、使用人員需要PLC專業知識等難題。
除了PLC控制之外,還可以使用繼電器控制系統來實現精確可靠的控制。繼電器控制系統由器件和導線連接而成,具有結構簡單、成本低等優點,同時由于原理簡單,對工程技術人員來說易于掌握。
-
控制系統
+關注
關注
41文章
6768瀏覽量
111894 -
機器人
+關注
關注
213文章
29569瀏覽量
211984
發布評論請先 登錄
虹科分享 功夫機器人來了!CMG擂臺之上的技術決勝點是什么?
基于先進MCU的機器人運動控制系統設計:理論、實踐與前沿技術
EtherCAT科普系列(7): EtherCAT技術在工業機器人控制系統領域的應用

高安全低功耗MCU:機器人控制系統的智能化與可靠性提升
EtherCAT通訊協議與網關模塊推動人形機器人的智能大變革

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.全書概覽與第一章學習
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
虹科攜手Seed Robotics,開啟機器人靈巧手合作新篇章

伺服控制機器人的控制方式有哪些
EtherCAT從站轉CANopen主站協議網關(JM-ECT-COP)
MT6501磁編IC在涂膠機器人領域應用






 工商網監
工商網監
評論