 可視化CNN和特征圖
可視化CNN和特征圖
作者:Ahzam Ejaz來源:DeepHub IMBA
卷積神經網絡(cnn)是一種神經網絡,通常用于圖像分類、目標檢測和其他計算機視覺任務。CNN的關鍵組件之一是特征圖,它是通過對圖像應用卷積濾波器生成的輸入圖像的表示。
理解卷積層
1、卷積操作
卷積的概念是CNN操作的核心。卷積是一種數學運算,它把兩個函數結合起來產生第三個函數。在cnn的上下文中,這兩個函數是輸入圖像和濾波器,而得到的結果就是特征圖。
2、卷積的層
卷積層包括在輸入圖像上滑動濾波器,并計算濾波器與輸入圖像的相應補丁之間的點積。然后將結果輸出值存儲在特征映射中的相應位置。通過應用多個過濾器,每個過濾器檢測一個不同的特征,我們可以生成多個特征映射。
3、重要參數
Stride:Stride 是指卷積濾波器在卷積運算過程中在輸入數據上移動的步長。
Padding:Padding是指在應用卷積操作之前在輸入圖像或特征映射的邊界周圍添加額外像素。Padding的目的是控制輸出特征圖的大小,保證濾波窗口能夠覆蓋輸入圖像或特征圖的邊緣。如果沒有填充,過濾器窗口將無法覆蓋輸入數據的邊緣,導致輸出特征映射的大小減小和信息丟失。有兩種類型的填充“valid”和“same”。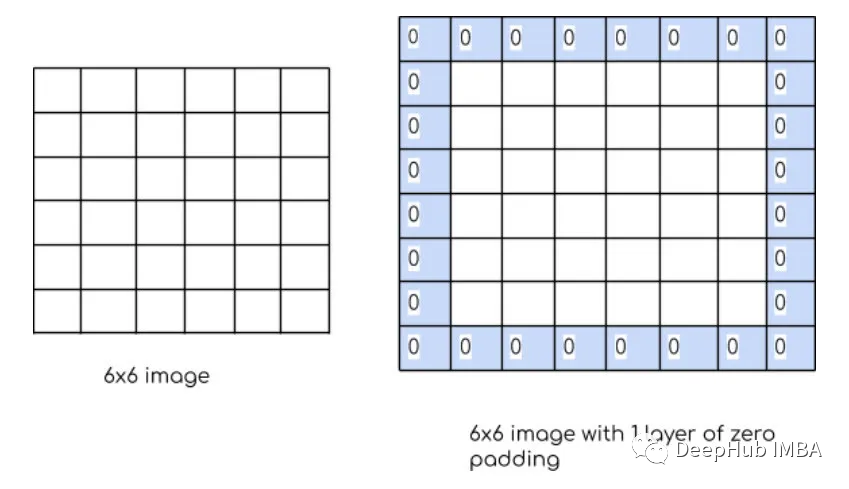 kernel/filter:kernel(也稱為filter 或 weight )是一個可學習參數的小矩陣,用于從輸入數據中提取特征。在下圖中,輸入圖像的大小為(5,5),過濾器filter 的大小為(3,3),綠色為輸入圖像,黃色區域為該圖像的過濾器。在輸入圖像上滑動濾波器,計算濾波器與輸入圖像的相應像素之間的點積。Padding是valid (也就是沒有填充)。stride值為1。
kernel/filter:kernel(也稱為filter 或 weight )是一個可學習參數的小矩陣,用于從輸入數據中提取特征。在下圖中,輸入圖像的大小為(5,5),過濾器filter 的大小為(3,3),綠色為輸入圖像,黃色區域為該圖像的過濾器。在輸入圖像上滑動濾波器,計算濾波器與輸入圖像的相應像素之間的點積。Padding是valid (也就是沒有填充)。stride值為1。
4、特征圖特征圖是卷積神經網絡(CNN)中卷積層的輸出。它們是二維數組,包含卷積濾波器從輸入圖像或信號中提取的特征。卷積層中特征圖的數量對應于該層中使用的過濾器的數量。每個過濾器通過對輸入數據應用卷積操作來生成單個特征映射。特征圖的大小取決于輸入數據的大小,卷積操作中使用的過濾器、填充和步幅的大小。通常,隨著我們深入網絡,特征圖的大小會減小,而特征圖的數量會增加。特征圖的大小可以用以下公式計算:
Output_Size = (Input_Size - Filter_Size + 2 * Padding) / Stride + 1
這個公式非常重要,因為在計算輸出時肯定會用到,所以一定要記住來自一個卷積層的特征映射作為網絡中下一層的輸入數據。隨著層數的增加,網絡能夠學習越來越復雜和抽象的特征。通過結合來自多層的特征,網絡可以識別輸入數據中的復雜模式,并做出準確的預測。
特征圖可視化
這里我們使用TF作為框架進行演示
## Importing libraries#Imageprocessinglibraryimportcv2#Kerasfromtensorflowimportkeras#InKeras,thelayersmoduleprovidesasetofpre-builtlayerclassesthatcanbeusedtoconstructneuralnetworks.fromkerasimportlayers#Forplotinggraphsandimagesimportmatplotlib.pyplotaspltimportnumpyasnp
使用OpenCV導入一張圖像,并將其大小調整為224 x 224像素。
img_size=(224,224)file_name="./data/archive/flowers/iris/10802001213_7687db7f0c_c.jpg"img=cv2.imread(file_name) #readingtheimageimg=cv2.resize(img,img_size)
我們添加2個卷積層:
model=keras.Sequential()filters=16model.add(layers.Conv2D(input_shape=(224,224,3),filters=filters,kernel_size=3))model.add(layers.Conv2D(filters=filters,kernel_size=3))
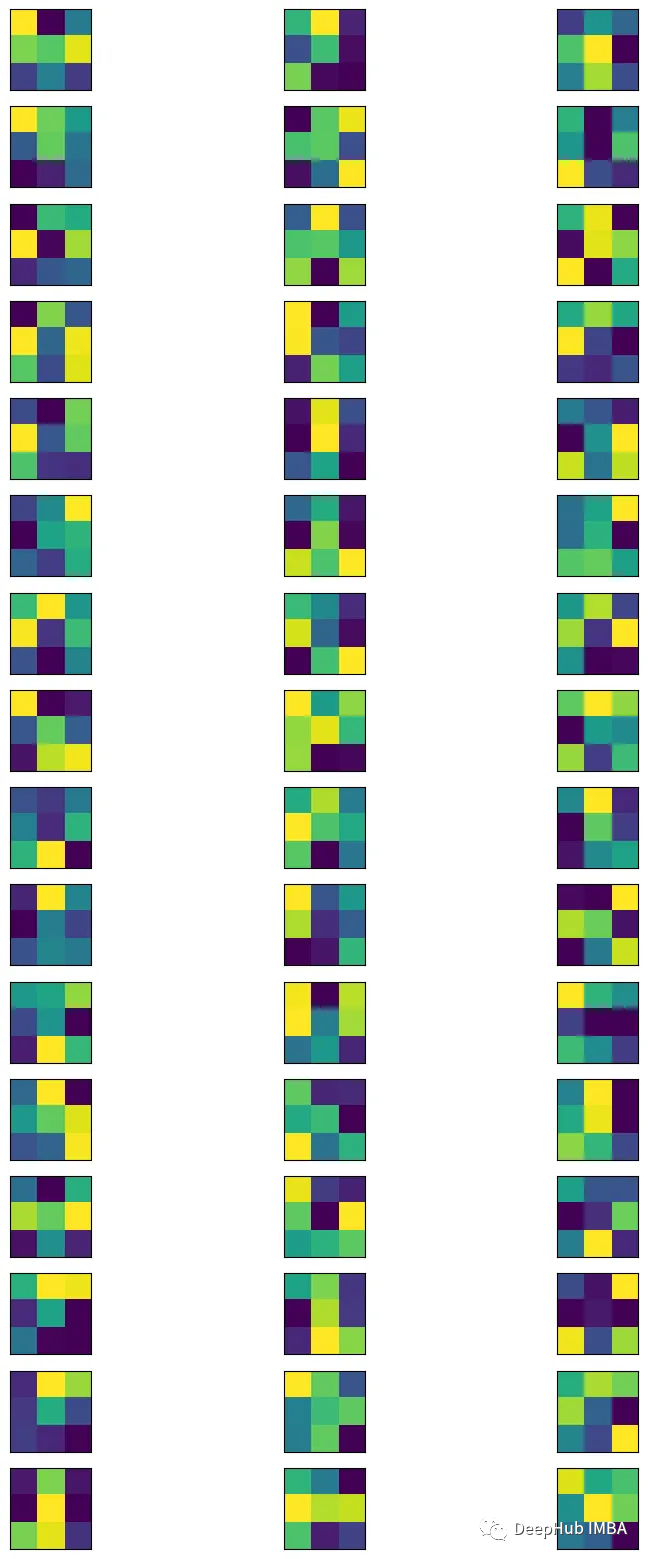
從卷積層中獲取過濾器。
filters, bias = model.layers[0].get_weights()min_filter = filters.min()max_filter = filters.max()filters = (filters - min_filter) / (max_filter - min_filter)p
可視化
figure=plt.figure(figsize=(10,20))filters_count=filters.shape[-1]channels=filters.shape[0]index=1forchannelinrange(channels):forfilterinrange(filters_count): plt.subplot(filters_count, channels, index) plt.imshow(filters[channel, :, :, filter]) plt.xticks([]) plt.yticks([]) index+=1plt.show()
 將圖像輸入到模型中得到特征圖
將圖像輸入到模型中得到特征圖
normalized_img=(img-img.min())/(img.max()-img.min())normalized_img=normalized_img.reshape(-1,224,224,3)feature_map=model.predict(normalized_img)
特征圖需要進行歸一化這樣才可以在matplotlib中顯示
feature_map = (feature_map - feature_map.min())/ (feature_map.max() - feature_map.min())
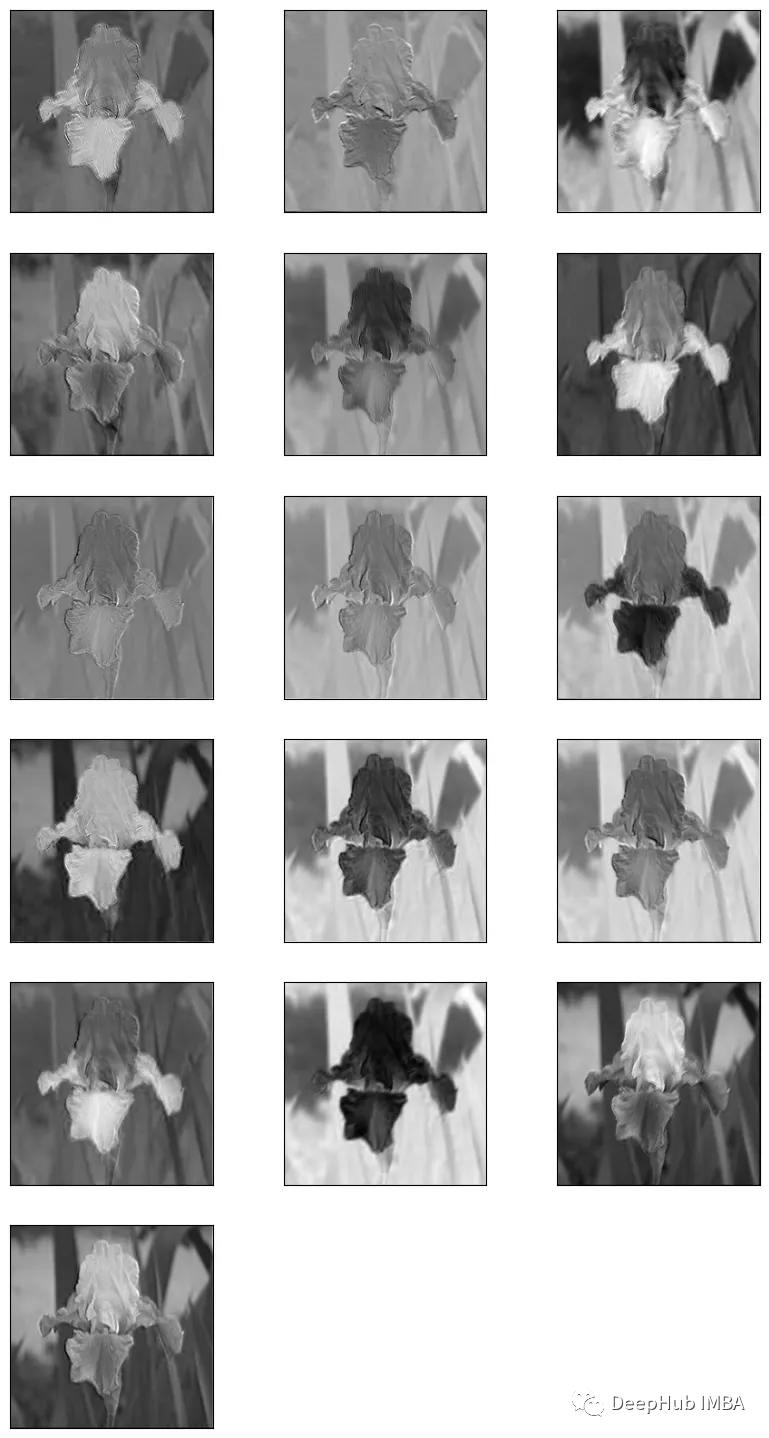
提取特征圖并顯示
total_imgs = feature_map.shape[0]no_features=feature_map.shape[-1]fig=plt.figure(figsize=(10,50))index=1 forimage_noinrange(total_imgs): forfeatureinrange(no_features):#plottingfor16filtersthatproduced16featuremapsplt.subplot(no_features,3,index)plt.imshow(feature_map[image_no,:,:,feature],cmap="gray")plt.xticks([])plt.yticks([])index+=1plt.show()
總結
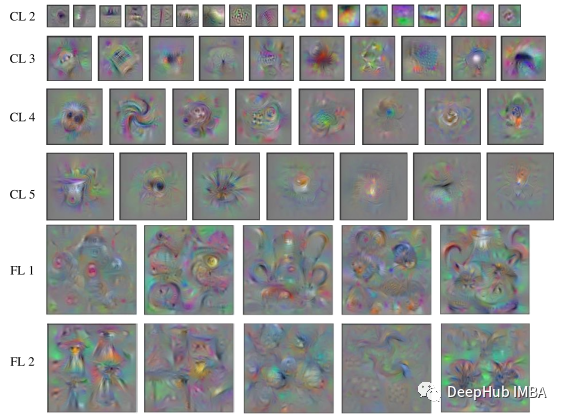
通過可視化CNN不同層的特征圖,可以更好地理解網絡在處理圖像時“看到”的是什么。例如,第一層可能會學習簡單的特征,如邊緣和角落,而后面的層可能會學習更抽象的特征,如特定物體的存在。通過查看特征圖,我們還可以識別圖像中對網絡決策過程重要的區域。
-
神經網絡
+關注
關注
42文章
4810瀏覽量
102949 -
cnn
+關注
關注
3文章
354瀏覽量
22659
發布評論請先 登錄
VirtualLab Fusion應用:3D系統可視化
可視化組態物聯網平臺是什么

VirtualLab Fusion中的可視化設置
VirtualLab Fusion應用:光波導k域布局可視化(“神奇的圓環”)
七款經久不衰的數據可視化工具!
光學系統的3D可視化
什么是大屏數據可視化?特點有哪些?
如何找到適合的大屏數據可視化系統
智慧能源可視化監管平臺——助力可視化能源數據管理

智慧樓宇可視化的優點
工業數據可視化管理平臺是什么
智慧地鐵站可視化建設的意義
大屏數據可視化 開源

如何實現園區大屏可視化?






 工商網監
工商網監
評論