") 無線射頻模塊RF4463F30應(yīng)用:智能遙控釣魚打窩船
無線射頻模塊RF4463F30應(yīng)用:智能遙控釣魚打窩船
無線射頻模塊RF4463F30在智能遙控釣魚打窩船的應(yīng)用介紹
智能遙控釣魚打窩船裝配有電子羅盤,GPS衛(wèi)星定位系統(tǒng),聲納式魚探儀,全數(shù)字雙向無線通信系統(tǒng):內(nèi)置無線射頻模塊RF4463F30。釣魚無線遙控打窩船的作用主要是探魚,載料定點(diǎn)打窩,投放餌料和魚鉤。
在啟動(dòng)打窩船后,首先要獲取打窩船的起始位置,而初次獲取位置信息需要一定時(shí)間,可選擇手動(dòng)開啟定位功能,或設(shè)置打窩船啟動(dòng)后自動(dòng)獲取位置信息。打窩船啟動(dòng)后自動(dòng)獲取起始位置需要一定時(shí)間,可通過遙控器操作打窩船在岸邊移動(dòng)預(yù)設(shè)距離,例如10米,進(jìn)而通過定位模塊獲取起始位置。或者通過遙控器控制打窩船在岸邊移動(dòng)預(yù)設(shè)時(shí)間,例如10秒,進(jìn)而通過定位模塊獲取起始位置。起始位置為坐標(biāo)信息,獲取起始位置后將起始位置數(shù)據(jù)存儲(chǔ)在打窩船和遙控器上,供后續(xù)操作使用。然后將起始位置數(shù)據(jù)通過無線射頻模塊RF4463PRO發(fā)送至服務(wù)器。
用遙控器啟動(dòng)探魚功能,觀察顯示屏,選好打窩點(diǎn),行駛至目標(biāo)位置后,并記錄目標(biāo)位置。打窩船內(nèi)置無線射頻模塊RF4463F30,將起始位置和目標(biāo)位置的數(shù)據(jù)發(fā)送至服務(wù)器,服務(wù)器上預(yù)存地圖信息和對(duì)應(yīng)算法,使用預(yù)設(shè)算法處理這兩個(gè)點(diǎn)得到規(guī)劃路線,并將規(guī)劃路線發(fā)送至打窩船和遙控器,打窩船沿規(guī)劃路線從目標(biāo)位置移動(dòng)至起始位置。可設(shè)置多個(gè)目標(biāo)位置,設(shè)置為定點(diǎn)1、定點(diǎn)2,定點(diǎn)3等等。
打窩船裝上魚鉤或餌料后自動(dòng)巡航至目標(biāo)位置自動(dòng)打窩,自動(dòng)放下魚鉤或餌料;打窩船獲取起始位置,從目標(biāo)位置自動(dòng)返回至起始位置。在初次打窩確定起始位置和目標(biāo)位置后,打窩船便可自動(dòng)往返于起始位置和目標(biāo)位置之間。
無線射頻模塊RF4463F30在智能遙控釣魚打窩船的應(yīng)用優(yōu)勢(shì)
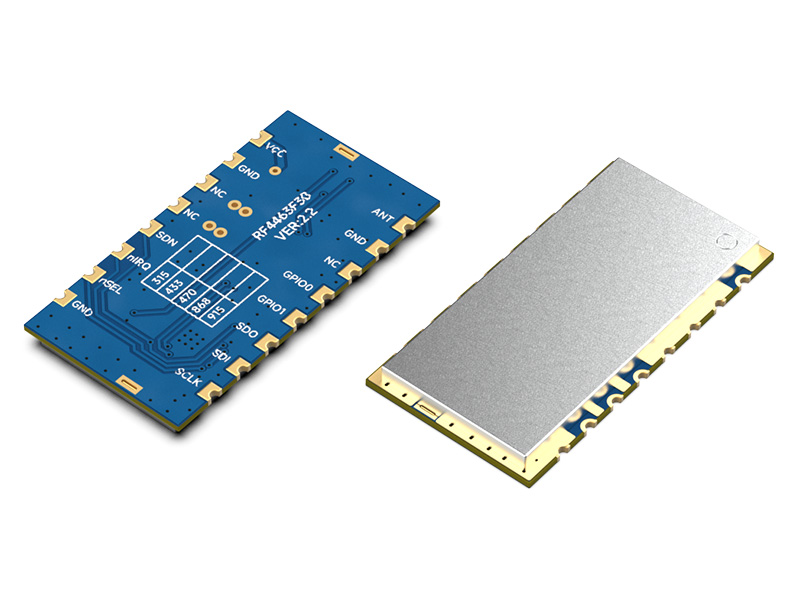
- RF4463F30無線射頻模塊采用的是Silicon Lab si4463器件,這是一款高度集成的無線ISM頻段收發(fā)芯片;
- 支持315/433/490/868/915MHz各種頻段(可定制142-1050MHz),滿足多種應(yīng)用需要;
- 接收靈敏度(-126dBm),1W的輸出功率;
- 傳輸距離:3公里;
- 支持低電能檢測(cè),定時(shí)喚醒功能、跳頻功能,內(nèi)置晶體調(diào)整功能,內(nèi)部集成穩(wěn)壓器。
以上就是無線射頻模塊RF4463F30在智能遙控釣魚打窩船的應(yīng)用和優(yōu)勢(shì)的總結(jié)和分享。
-
射頻
+關(guān)注
關(guān)注
106文章
5717瀏覽量
169383 -
無線
+關(guān)注
關(guān)注
31文章
5518瀏覽量
175011 -
射頻模塊
+關(guān)注
關(guān)注
5文章
88瀏覽量
19950
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
藍(lán)牙無線遙控小車
2025年射頻模塊廠家市場(chǎng)分析與方案應(yīng)用指南
新品:同等小體積通信距離翻一倍-RF3060F27通信模塊
低頻發(fā)射模塊和射頻接收模塊在無鑰匙系統(tǒng)中的作用和重要性
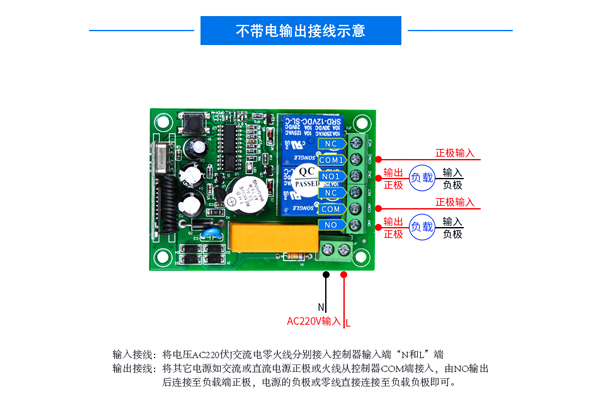
三相無線遙控開關(guān)怎么接線
RF遙控器廠家:射頻遙控器將成為未來的控制主流
探索無線遙控智能云臺(tái)的驅(qū)動(dòng)方案

無線智能遙控開關(guān)怎么接線
無線智能遙控開關(guān)怎么對(duì)碼
射頻技術(shù)rf的基本原理是什么
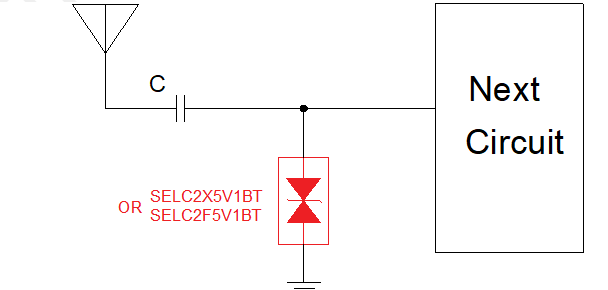
射頻(RF)靜電放電防護(hù)方案
LoRa模塊在釣魚場(chǎng)景中如何應(yīng)用?
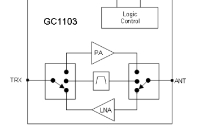
2.4GHz ISM射頻前端芯片GC1103在無線遙控玩具中的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論