") TMC4671驅動步進電機之tmc4671配置代碼與TMC4671模擬編碼器設置
TMC4671驅動步進電機之tmc4671配置代碼與TMC4671模擬編碼器設置
ADI TMC4671是一款完全集成的伺服控制器,可為BLDC/PMSM和兩相步進電機以及直流電機和音圈提供磁場定向控制(FOC)。所有控制功能都在硬件中實現(xiàn)。TMC4671可以為直流無刷電機、永磁同步電機、2相步進電機、直流有刷電機和音圈電機提供磁場定向控制。
此外TMC4671還集成 ADC、位置傳感器接口、位置插值器,為廣泛的伺服應用提供功能齊全的伺服控制器。
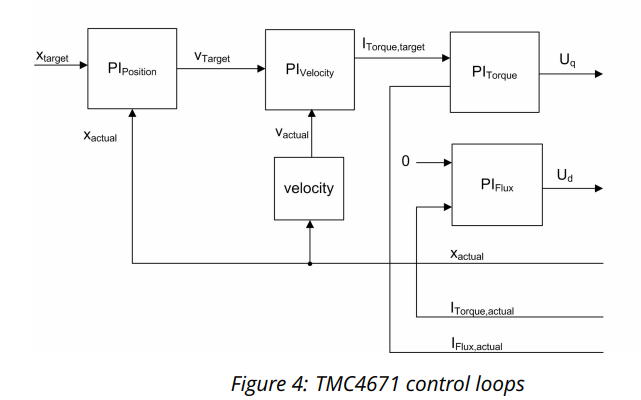
TMC4671硬件集成的電機控制算法及三環(huán)控制算法使得開發(fā)電機不需要編寫一行代碼即可完成。
而且TMC4671具有高達100kHz的開關頻率和控制器更新速率,并具有濾波和插值功能,如數(shù)字霍爾信號插值,以實現(xiàn)更順暢的操作。該集成電路可以與各類編碼器協(xié)同工作:從A/B/Z增量式簡單的數(shù)字或模擬霍爾傳感器到高分辨率正弦/余弦模擬編碼器。傳感器可靈活地映射為位置和速度控制回路的輸入。憑借其delta-sigma電流檢測ADC,TMC4671非常適合用于隔離式delta-sigma前端。
TMC4671性能描述:
○ 帶有磁場矢量控制(FOC)的伺服控制芯片
轉矩控制模式
速度控制模式
位置控制模式
電流控制刷新頻率和最大的PWM頻率為100KHz (速度和位置控制的刷新頻率可以根據(jù)當前電流刷新頻率的倍數(shù)配置)
○ 控制功能/ PI控制器
中期結果的輸入和輸出可編程斬波
以積分電路結尾保護所有控制
可編程的電壓循環(huán)向導限制器
目標值的前饋補償和前饋摩擦補償
高級前饋控制結構,實現(xiàn)最佳軌跡跟蹤性能
擴展的中斷請求掩蔽選項和限制器狀態(tài)寄存器
具有霍爾傳感器或/和最小移動的高級編碼器初始化算法
○ 運動控制和坡形控制
控制結構的梯形速度斜坡
脈沖/方向接口,方便定位
○ 支持的電機種類
直流無刷電機
永磁同步電機
2相步進電機
直流有刷電機
音圈電機
○ 位置反饋
開環(huán)位置發(fā)生器(可編程的PRM,RPM/S)用于初始化配置
數(shù)字增量編碼器(ABN,ABZ 高達5MHz)
第二路數(shù)字量編碼器輸入(雙反饋)
數(shù)字霍爾輸入接口帶有臨時位置插補功能(H1, H2, H3 resp. HU, HV , HW)
模擬量編碼器/模擬量霍爾輸入接口(SinCos (0?°, 90?°) or 0?°, 120?°, 240?°)
多圈位置計數(shù)器(32位)
目標位置、速度和目標轉矩濾波(雙階)
○ PWM包括SVPWM
可編程的PWM頻率范圍從20KHz100KHzn
可編程的BBM(BrakeBeforeMake)時間(偏低,偏高)0 ns 。 。 。 2.5_s在10ns步驟內(nèi)和柵極驅動輸入信號
PWM自動調(diào)整,用于運動期間改變PWM頻率
○ SPI通訊接口
40位數(shù)據(jù)長度(1個ReadWrite位+7個地址位+32個數(shù)據(jù)位)
立即SPI讀取響應(通過單個數(shù)據(jù)報進行寄存器讀取訪問)
SPI時鐘頻率高達1 MHz(未來版本為8 MHz)
○ TRINAMIC實時監(jiān)控接口(SPI Master)
通過TRINAMIC的實時監(jiān)控系統(tǒng)實現(xiàn)實時數(shù)據(jù)高頻采樣
高級控制器通過頻率響應識別和高級自動調(diào)諧支持使用TRINAMIC IDE調(diào)整選項
○ UART調(diào)試接口
3引腳(GND, RxD, TxD) 3.3V UART接口(1N8; 9600 (default), 115200, 921600, or 3M bps)
簡易寄存器訪問并行于嵌入式用戶應用程序接口(SPI)
○ 供電電壓:5V和3.3V;1.8V的VCC_CORE由內(nèi)部產(chǎn)生
○ IO電壓:3.3V用于所有的數(shù)字(可由VCCIO選擇提供);5V插分模擬量輸入范圍,3V為單端輸入范圍
○ 時鐘頻率:25MHz(需要外部振蕩器)
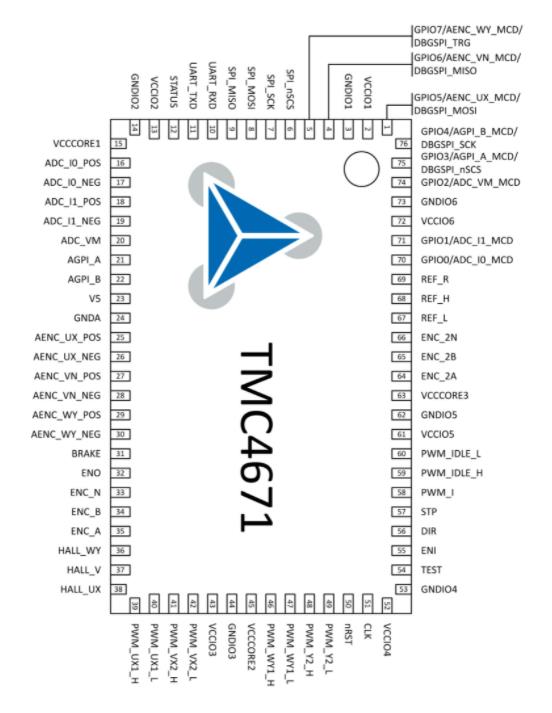
○ 封裝:QFN76
TMC4671驅動步進電機之tmc4671配置代碼與TMC4671模擬編碼器設置
下面我們分享一個Excelpoint世健邀請的21IC資深工程師TopGun評測ADI Trinamic的無刷電機控制開發(fā)板案例。
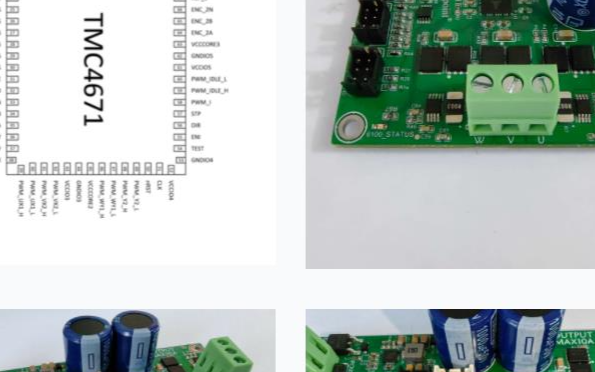
通過Motor Control連接板實現(xiàn)套件的級聯(lián):
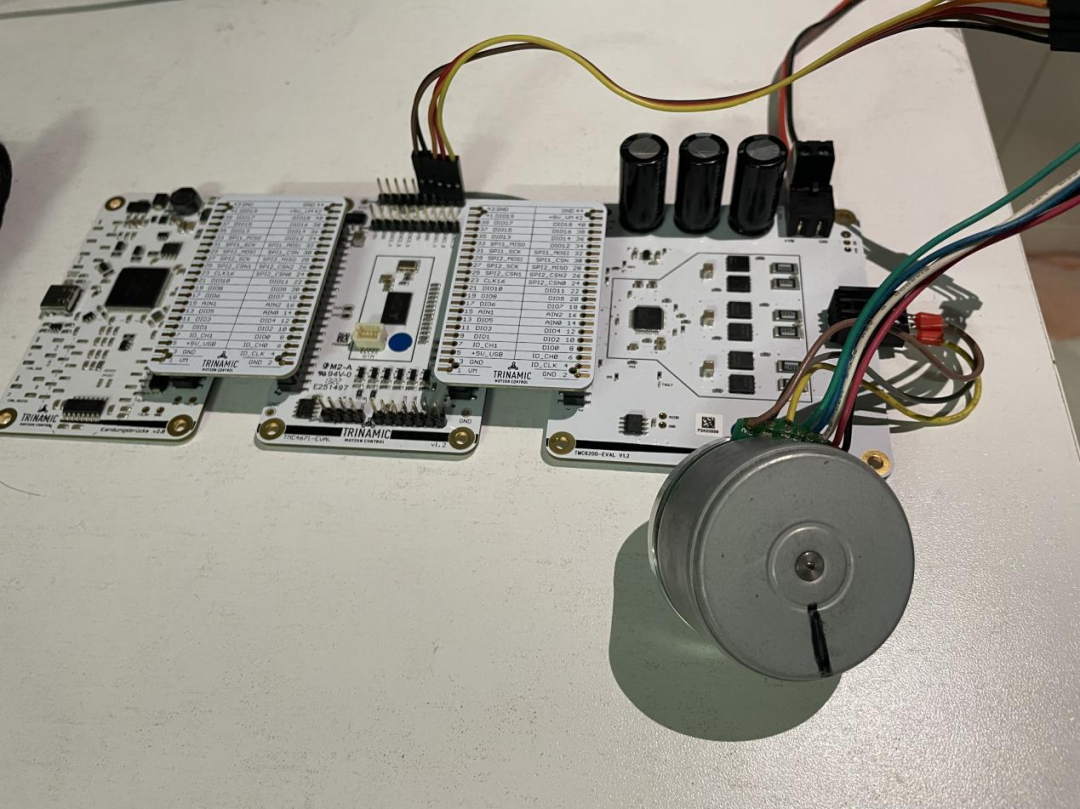
工程師本人手上有個帶霍爾傳感器的無刷電機,剛好可以用來測試這個TMC4671套件。接好電源、電機三相線及霍爾接線,再用type-c線連接套件和電腦。
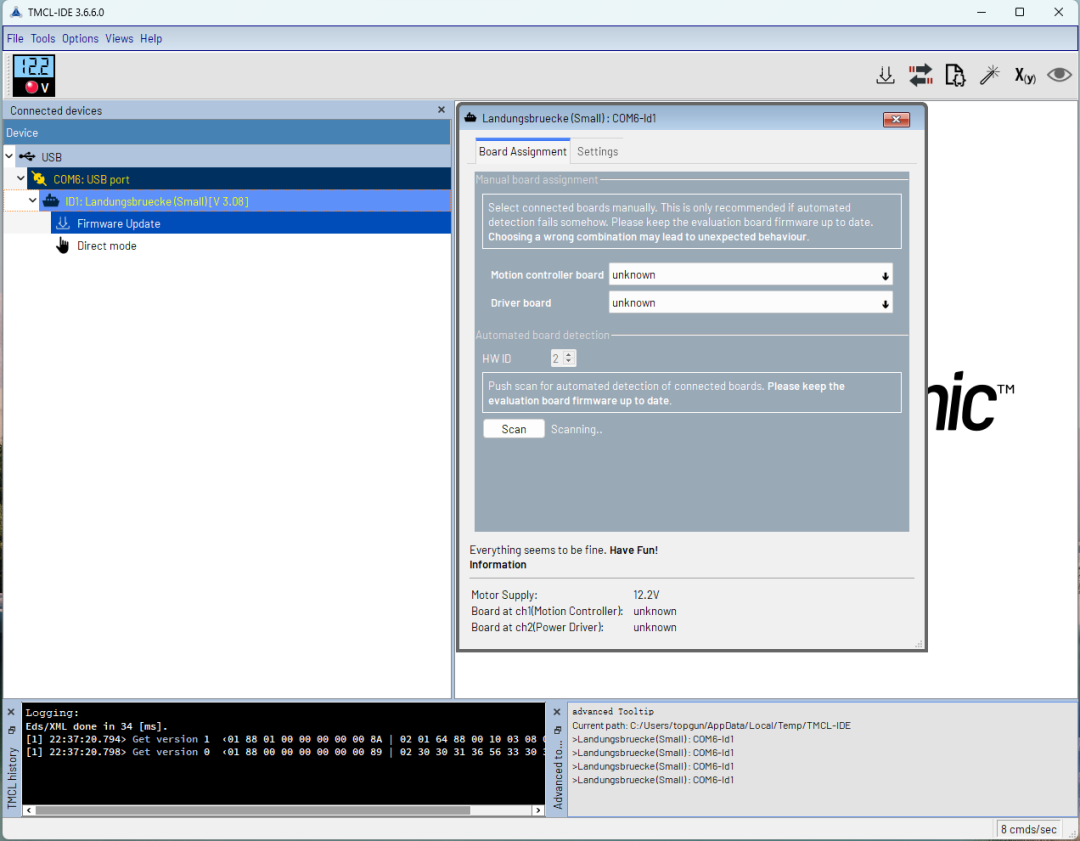
打開TMCL-IDE后,可以看到已經(jīng)可以識別到Landungsbruecke主板,固件版本也能正常獲取為V3.08。
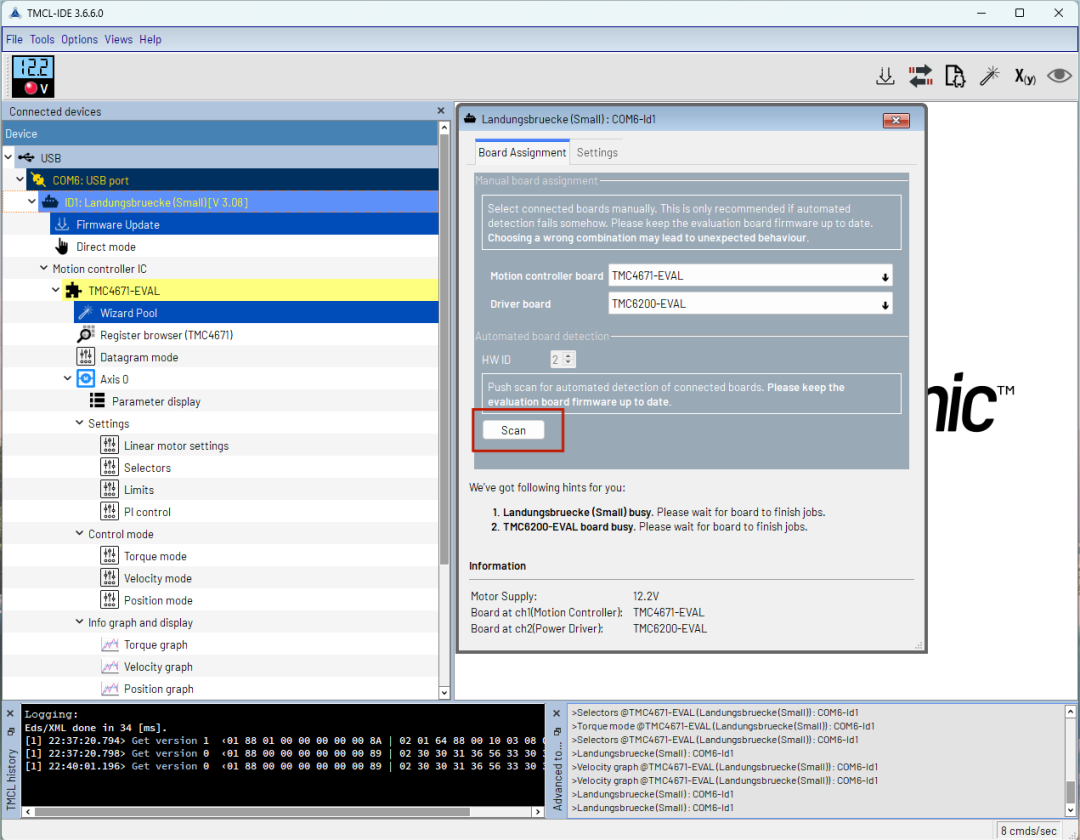
在右邊的配置面板可以自己選擇板子的型號,也可以點擊“Scan”自動掃描板子。
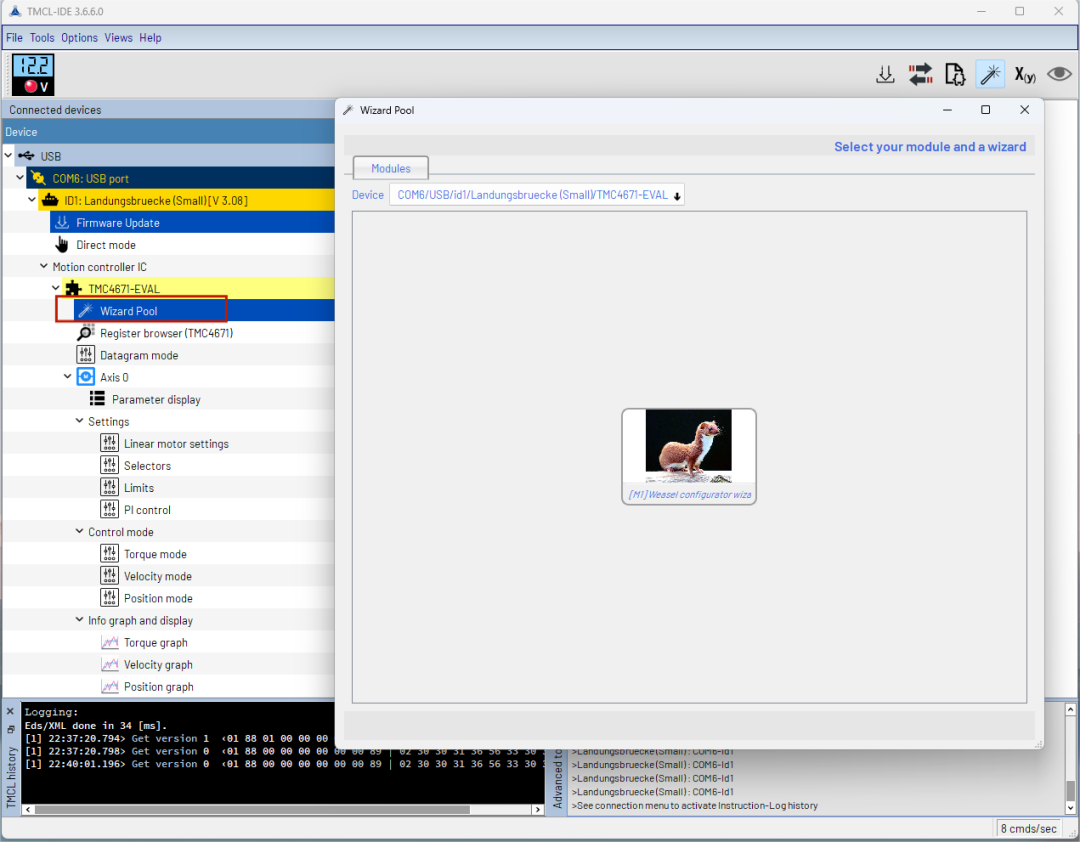
選擇TMC4671-EVAL板子配置,點擊“Wizard Pool”按鈕進行配置向導一步步對TMC4671進行配置。
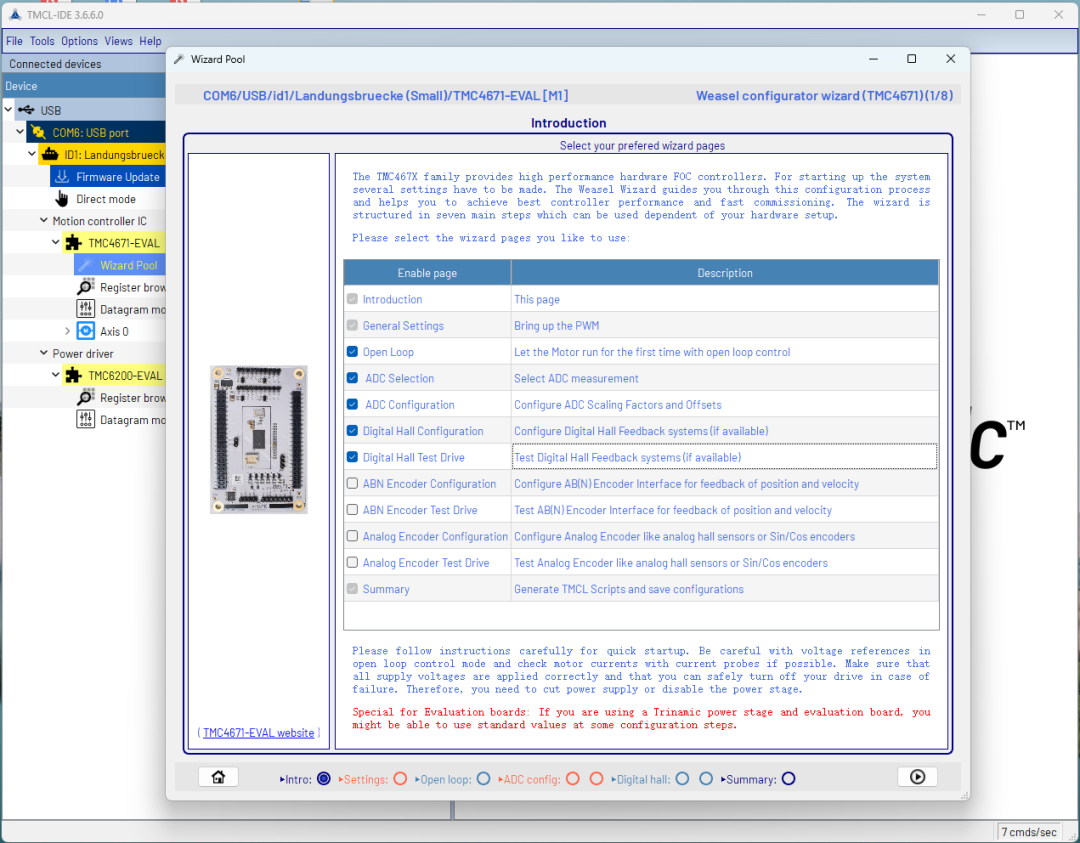
第一步,配置一下套件的功能,因為測試電機沒有ABZ編碼器,所以這幾項得取消了。
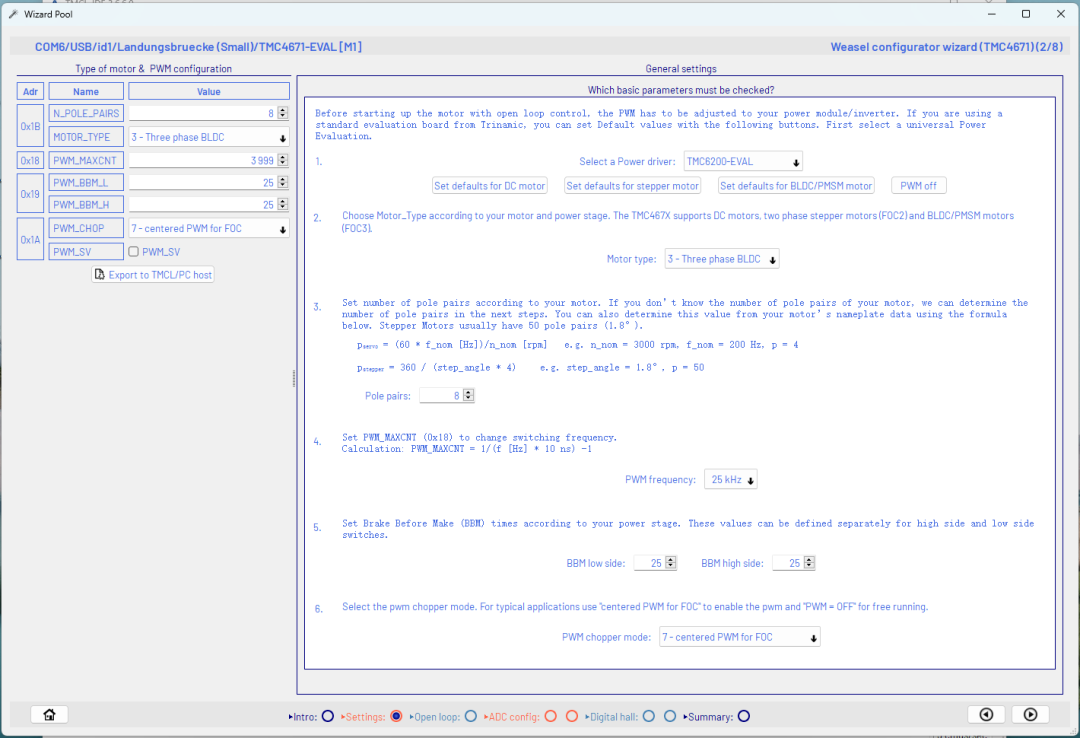
接下來需要進行通用配置,此套件功率板用的是TMC6200-EVAL,電機類型選擇3-Three phase BLDC,電機的極對數(shù)選擇8,其他配置默認即可。
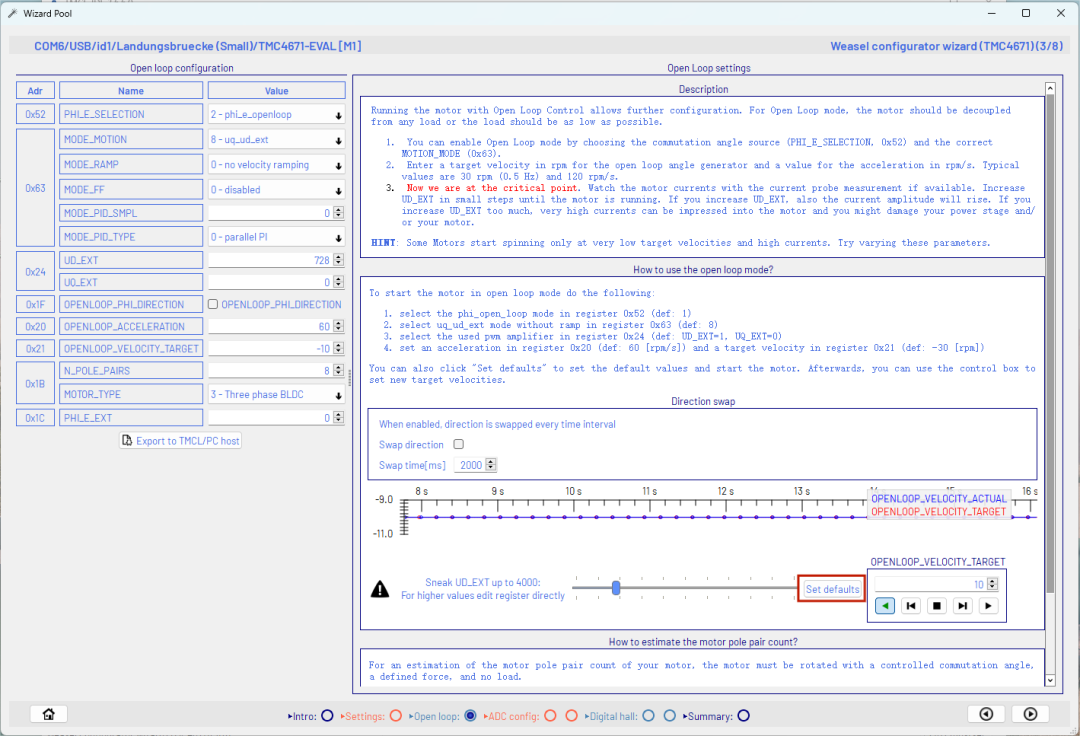
繼續(xù)配置開環(huán)參數(shù),點擊“Set defaults”按鈕,拖動UD_EXT的滑動條,然后點擊“運行”按鈕,電機就會開始慢速轉動起來,左右兩邊的箭頭為控制轉動的方向,快進鍵為電機點動。
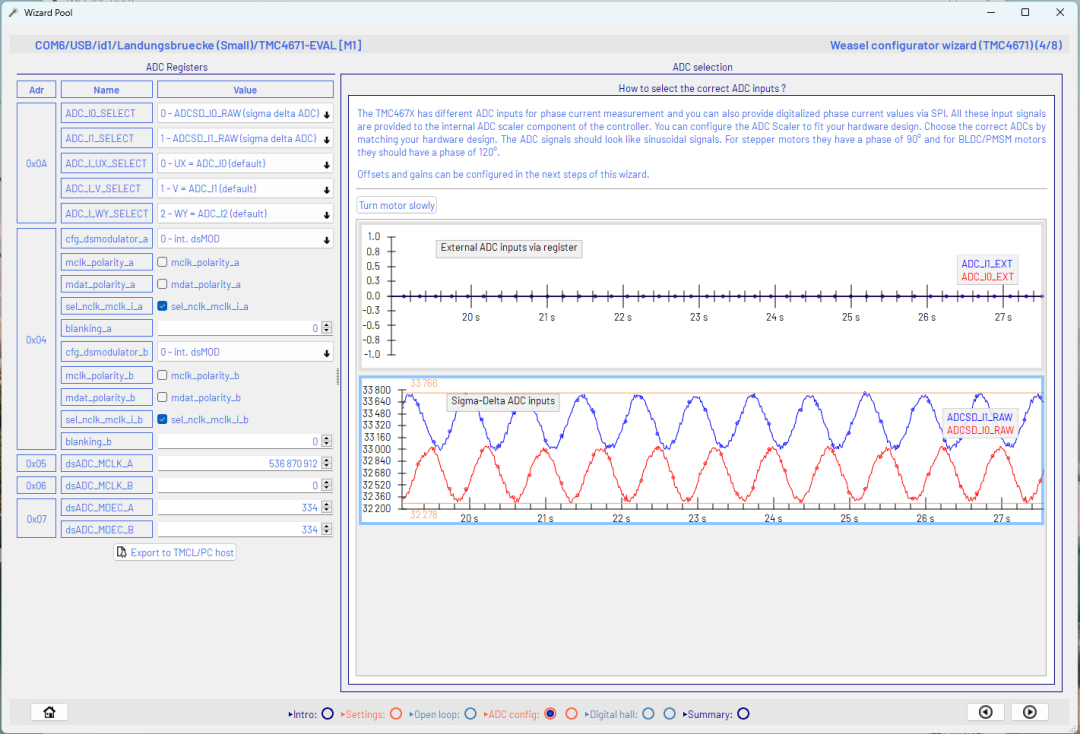
再下一個頁面是對ADC進行配置。此頁面只要能正常看到有ADC正弦波形即可,主要看ADC采集是否正常。
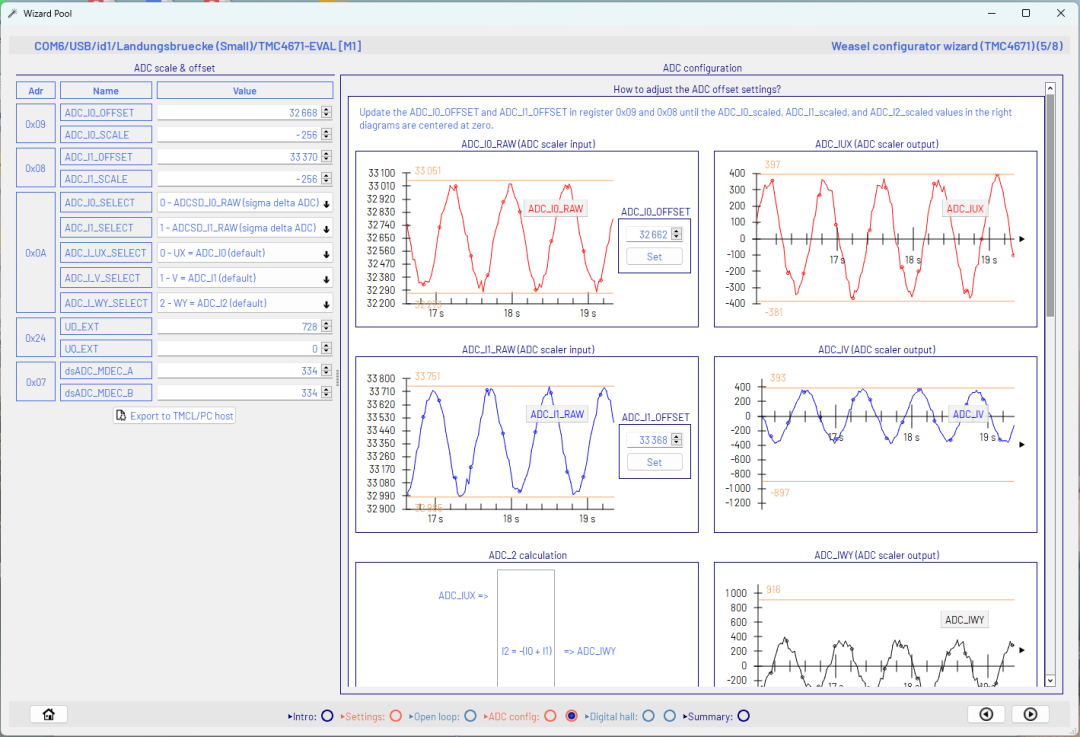
接下來對ADC進行偏移校準,兩路ADC軟件都通過實時采樣數(shù)據(jù)自動算好偏移值了,直接點一下“Set”按鈕就行了。
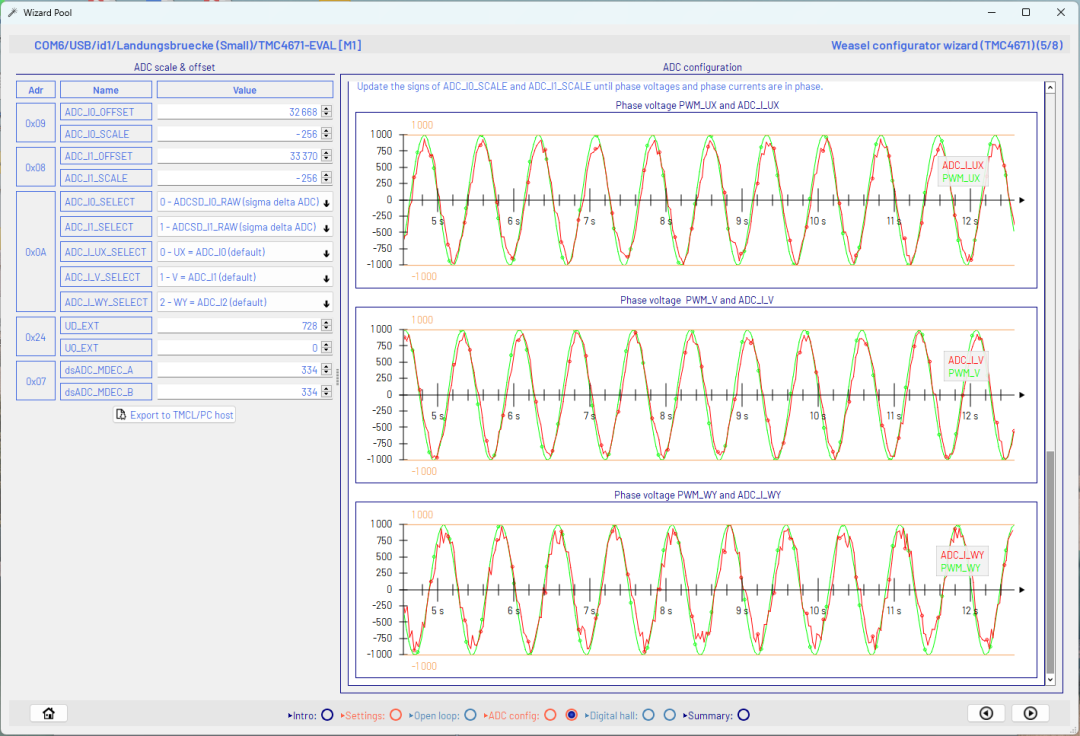
將頁面往下拉,需要確保三相的電壓和ADC采集的數(shù)據(jù)曲線重合,否則需要調(diào)整0x0A寄存器里面ADC的選擇配置,直到曲線基本重合。
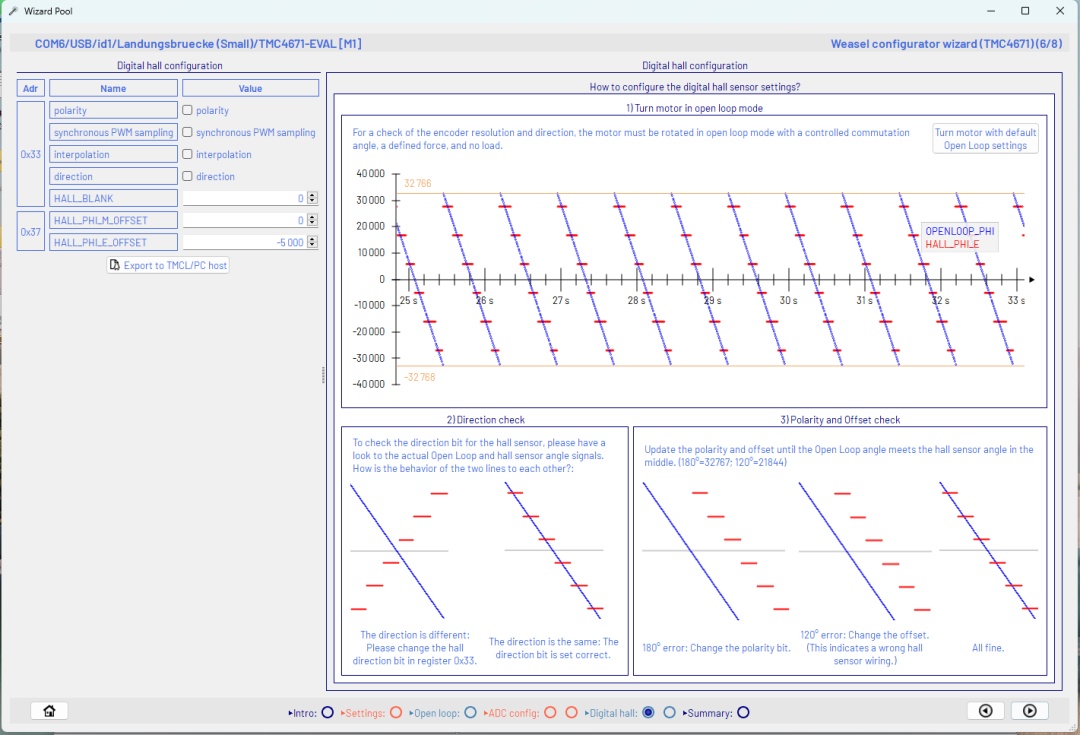
接下來對霍爾傳感器進行配置,根據(jù)向導要讓霍爾信號與電信號交叉,因為測試電子自帶霍爾,所以不需要進行額外的校準,已經(jīng)可以直接使用了。
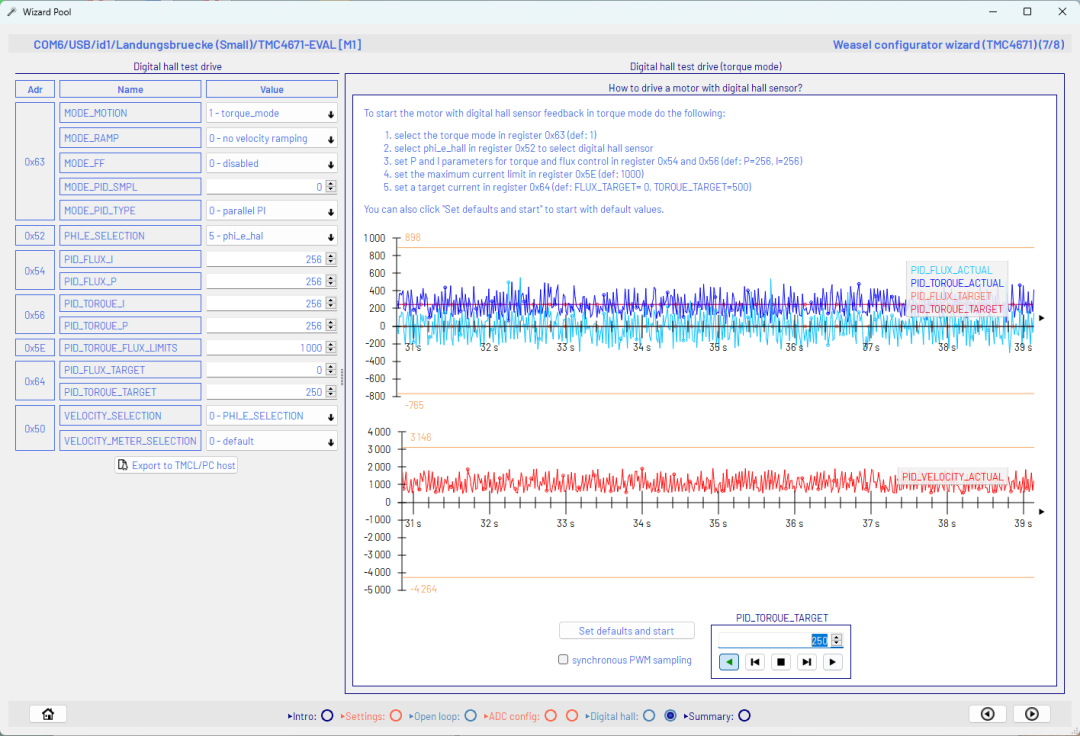
配置好霍爾傳感器進入測試步驟,首先點一下“Set defaults and start”按鈕,輸入目標電流點擊運行,觀測電機到電機能正常跑起來了,說明霍爾接口配置正常。到這里,配置向導基本完成,已經(jīng)對套件完成初始化配置了。
電機性能測試
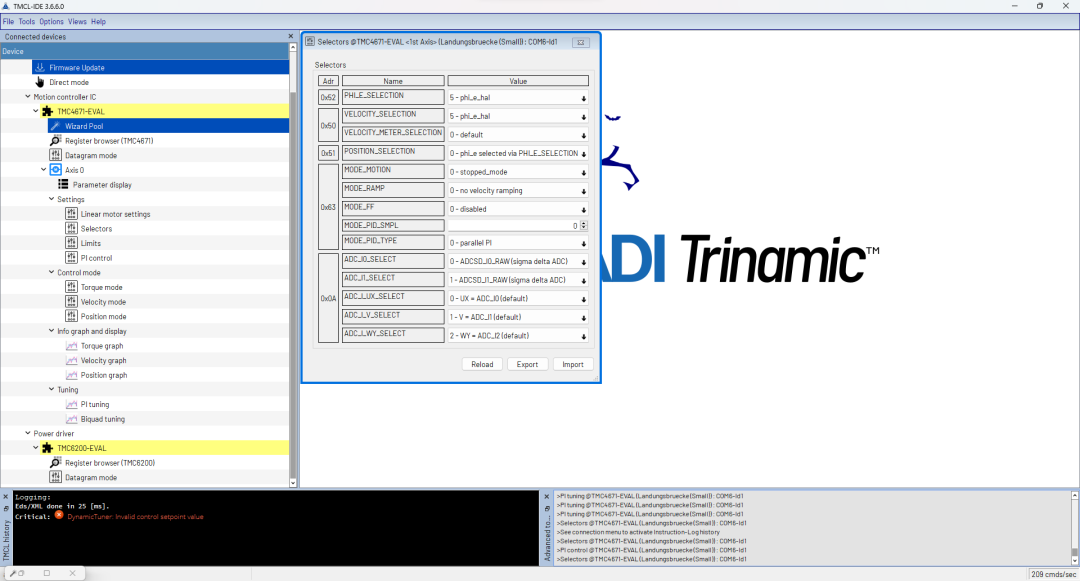
初始化向導后,就可以對套件進一步調(diào)試了。首先,打開“Selectors”對電角度輸入源,速度反饋源位置反饋源進行配置,這里都設為霍爾傳感器作為反饋。
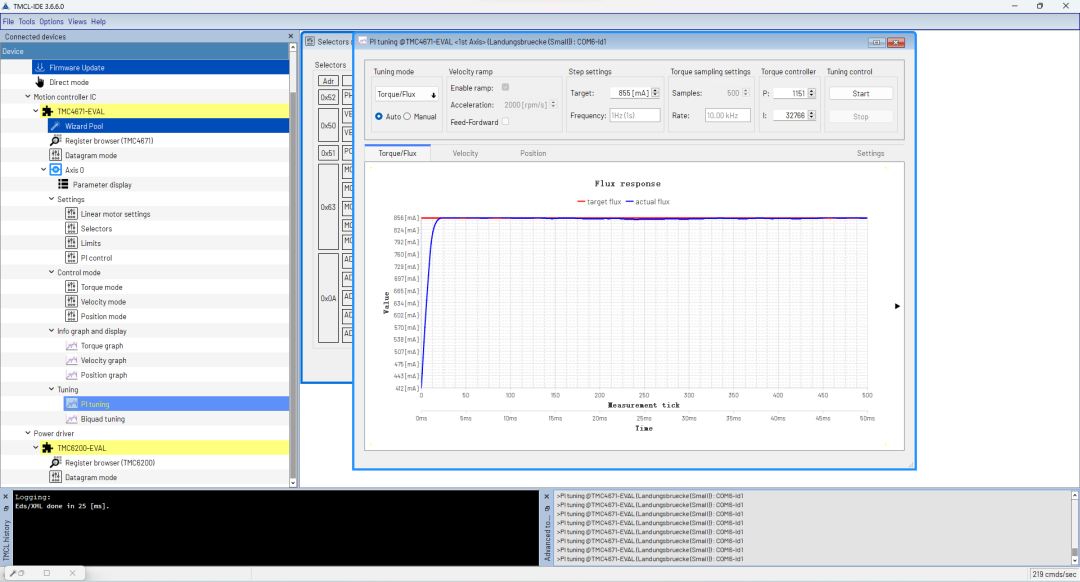
PID參數(shù)調(diào)節(jié)是電機控制的痛點,TMC上位機這邊提供了參數(shù)擬定的工具,選擇“Torque/Flux”,點擊“Start”開始后,就會自動對電機電流環(huán)進行參數(shù)擬定,擬定后的參數(shù)會自動同步到“PI control”中。
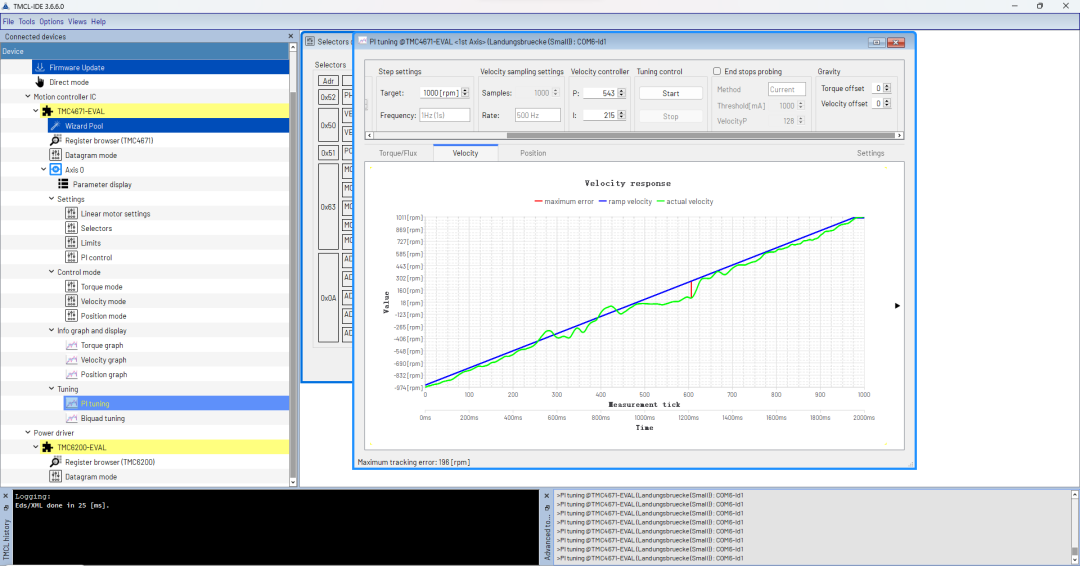
速度環(huán)的PI參數(shù)擬定也是同樣的邏輯。設定好目標速度后,選擇“Velecity”,點擊開始后,即可對速度環(huán)進行參數(shù)擬定。
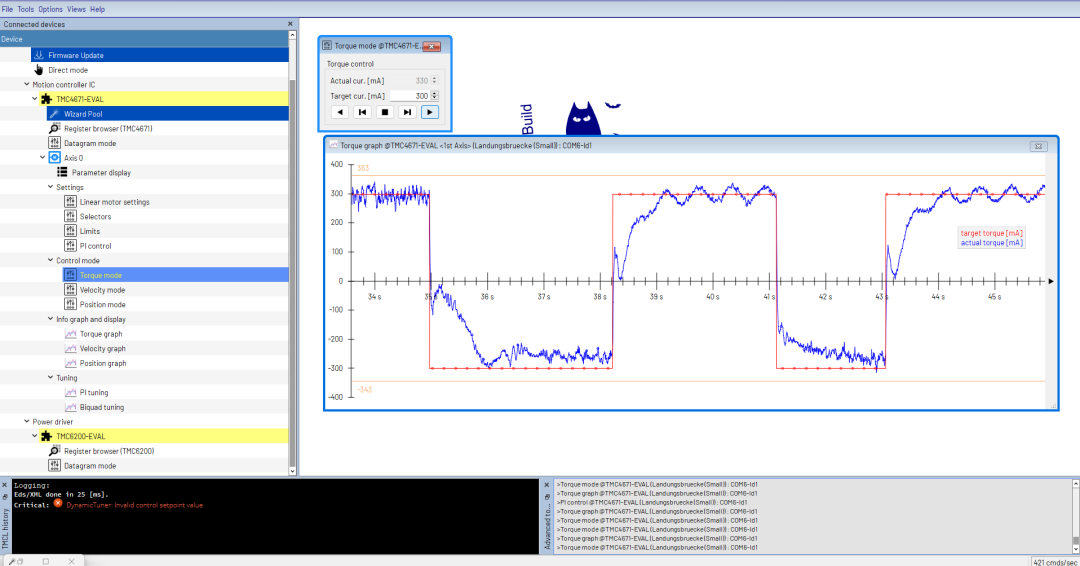
PID參數(shù)擬定完畢,我們就可以來測測實際的運行性能了。首先,對電流環(huán)進行測試,設定目標電流后,利用左右箭頭兩種按鈕切換電機運行方向,通過換向來驗證階躍響應,也可自行微調(diào)PI參數(shù)達到更理想的運行效果。
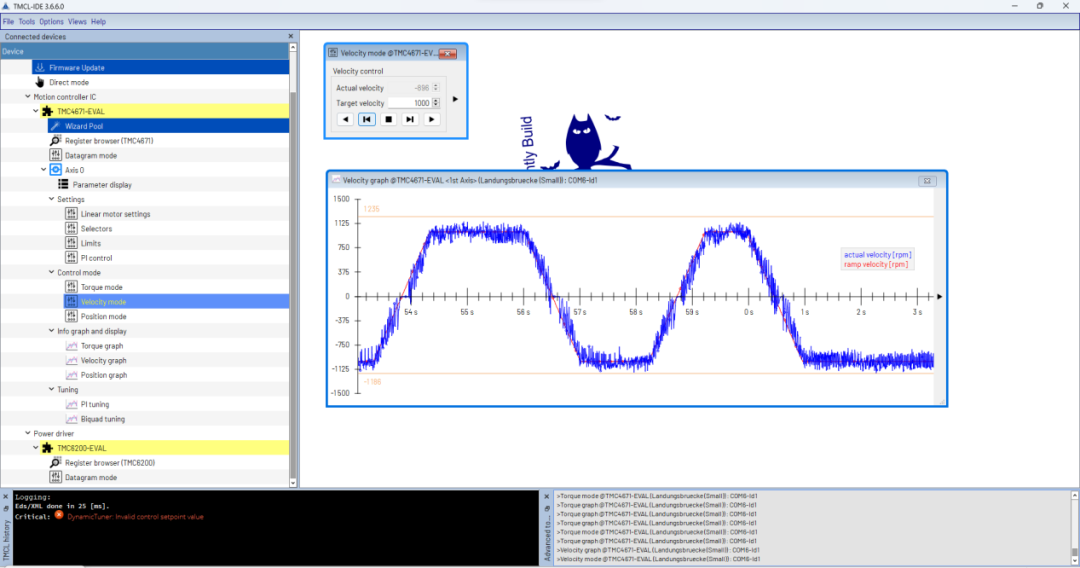
接著,來測試速度環(huán)的性能。切換到速度模式,跟測試電流環(huán)一樣,手動控制電機運動換向測試響應和跟隨性,可以看到目標速度和實際反饋速度基本重合,說明跟隨性很不錯。
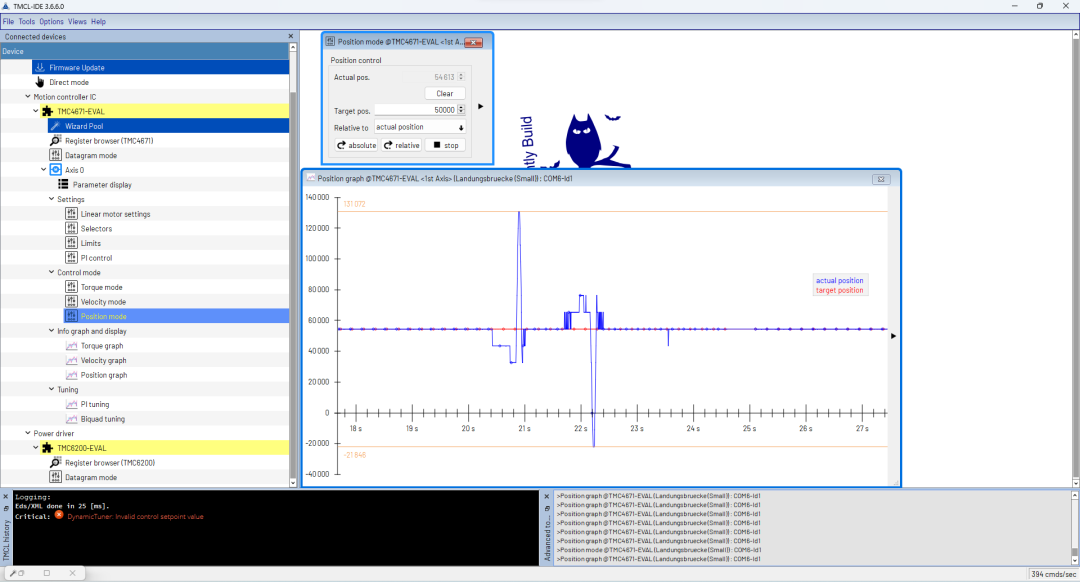
接著測試位置環(huán),切換到位置環(huán)模式,設置目標位置,電機能很快運動到目標位置并收斂在目標位置。測試電機位置環(huán),通過人為擰動電機,電機會很快就收斂到目標位置。不過,要想進一步提升位置環(huán)的性能,單純用霍爾傳感器是不夠的,一般位置環(huán)的應用一般需要增量編碼器或者絕對式編碼器。
如何使用 USB-2-RTMI(RTMI)去調(diào)試 TMC4671;以及TMC4671的三環(huán)配置方法詳細說明大家可以點擊參閱:http://m.xsypw.cn/soft/78/223/2020/202002061162162.html
本文也參考了很多Excelpoint世健 “電機開發(fā)利器——ADI TMC4671套件評測”該文的內(nèi)容,大家可以查看更詳細的tmc4671配置介紹:http://m.xsypw.cn/d/2142777.html
對電機驅動器及控制器 Trinamic TMC4671-ES 感興趣的可以前往華秋商城:https://item.hqchip.com/2500219060.html
TMC4671-Datasheet可以點擊查看 https://pdf.elecfans.com/Search?f=&q=tmc4671
http://m.xsypw.cn/soft/70/2021/202109281712396.html
-
編碼器
+關注
關注
45文章
3784瀏覽量
137454 -
步進電機
+關注
關注
152文章
3162瀏覽量
149315 -
伺服控制器
+關注
關注
2文章
93瀏覽量
19145 -
電機控制算法
+關注
關注
0文章
7瀏覽量
9281 -
tmc4671
+關注
關注
1文章
10瀏覽量
4004
發(fā)布評論請先 登錄
伺服控制芯片TMC4671性能概述
tmc4671控制方案分享 TMC4671+TMC6200設計正壓睡眠呼吸機

硬件FOC伺服控制芯片TMC4671編碼器相序整定代碼
TMC4671硬件FOC伺服控制芯片PID自動調(diào)整方法
TMC4671應用簡介功能描述
德國TRINAMIC硬件伺服FOC控制芯片TMC4671力矩環(huán)速度環(huán)位置環(huán)PI配置方法
TMC4671相關資料分享
TMC4671基于硬件FOC伺服電機控制芯片適應BLDC/PMSM等
硬件伺服控制芯片TMC4671的三環(huán)配置方法詳細說明
TMC4671基于硬件FOC伺服電機控制芯片適應BLDCPMSM、兩相步進、直流有刷、音圈電機

tmc4671控制方案
tmc4671中文手冊
【開獎】小白福音:電機開發(fā)利器——ADI TMC4671套件評測

TMC4671的優(yōu)缺點與tmc4671原理圖一文講解





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論