 六軸機器人結構設計 傳統六軸機器人的基本構成
六軸機器人結構設計 傳統六軸機器人的基本構成

傳統關節機器人主要由本體結構件、減速器、伺服電機、控制器等構成。
本體結構件
工業機器人本體由旋轉機座,大臂,小臂等部位組成,是機器人外面最直接的機械結構。機器人本體結構件包含鑄鐵、鑄鋼、鑄鋁、結構鋼等多種材質。
減速器
減速器用于承載機器人各個關節的載荷,電機輸出的高轉速低扭矩通過減速器后形成低轉速高轉矩,從而提升機器人各軸的輸出力矩,使得機器人可以承受較大的負載。機器人對減速器的要求很高,需要減速器體積小、質量小、減速比大、精度高、抗沖擊等。
目前大量應用于多關節機器人的減速器主要有兩種:一種是RV減速器,另一種是諧波減速器。RV減速器因具有更高的剛度和回轉精度,一般被放置在大臂、肩部等重負載位置;諧波減速器則被放置在小臂及手腕部。
驅動控制系統
驅動控制系統主要用于控制機器人按照設定的運動參數進行運動。其主要包含伺服驅動器、伺服電機和控制器。
(1)伺服電機主要用于驅動機器人的關節,要求具備最大功率質量比和扭矩慣量比、高啟動轉矩、低慣量和較寬廣且平滑的調速范圍;
(2)伺服驅動器是驅動伺服電機進行運動的裝置,根據控制器的指令,伺服驅動器給予伺服電機相應的電流,從而保證伺服電機按照需求的運動速度、加速度、運轉位置等條件進行運動,從保證機械臂的運動達到設定要求。
(3)控制器可對其內部參數進行人工設定而實現對機器人的位置控制、速度控制和轉矩控制等多種功能。
六軸串聯機器人“軸”作用
傳統六軸工業機器人一般有6個自由度,常見的包含旋轉(S軸),下臂(L軸)、上臂(U軸)、手腕旋轉(R軸)、手腕擺動(B軸)和手腕回轉(T軸)。6個關節合成實現末端的6自由度動作。
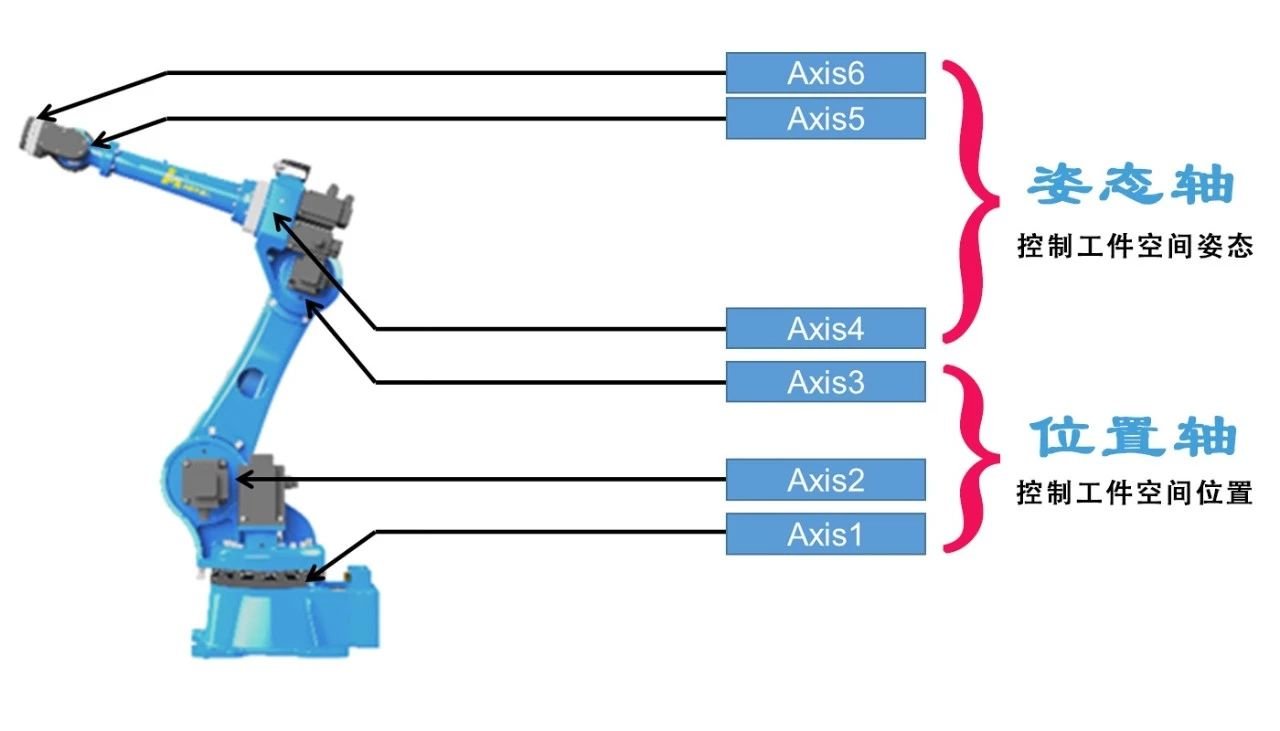
一軸:第一個軸是連接底座的部分,承載著整個機器人的重量和和底座的左右轉動;
二軸:控制機器人大臂的前后擺動;
三軸:控制機器人小臂的前后擺動;
四軸:控制機器人小臂旋轉;
五軸:控制和上下微調機械手手腕的轉動,通常是當產品抓取后可以進行產品翻轉的動作;
六軸:用于末端夾具部分的旋轉功能,可更精確定位到產品。
Tips
根據應用場景不同,手腕部分也有不同的結構設計方式。B(bend)表示彎曲結構,R(revolve)表示轉動結構。

六軸串聯機器人優劣勢
優勢
結構緊湊,安裝占地面積小;
靈活性好,手部到達位置范圍大,具有較好的避障性能;
沒有移動關節,關節密封性能好,摩擦小,慣量小;
關節驅動力小,能耗較低。
劣勢
運動過程中存在平衡問題,控制存在耦合;
當大臂和小臂舒展開時,機器人結構剛度較差;
控制運動過程中存在奇異點,使用及控制算法需規避。
責任編輯:彭菁
-
工業機器人
+關注
關注
91文章
3450瀏覽量
93924 -
減速器
+關注
關注
7文章
414瀏覽量
23787 -
六軸機器人
+關注
關注
0文章
42瀏覽量
4597
發布評論請先 登錄
LabVIEW的六軸工業機器人運動控制系統
stm32紅外六足機器人
六軸機器人是哪六個軸
焊接機器人六個軸分別是什么作用






 工商網監
工商網監
評論