") 四元數(shù)轉方向余弦矩陣介紹
四元數(shù)轉方向余弦矩陣介紹

2.1 歐拉定理
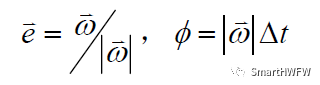
歐拉定理是剛體定點轉動理論中的一個重要定理,它表明剛體繞固定點的任何位移都可以通過繞通過此點的某一軸轉過一個角度來實現(xiàn)。在單位時間間隔Δt內,假設剛體的角速度為ω,則該轉動軸的方向e及繞該軸轉過的角度φ分別為:e = ω/|ω|,φ = |ω|Δt。
相應四元數(shù)表示式為:
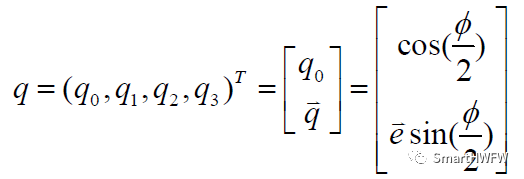
滿足約束條件
以超復數(shù)形式表示有:

滿足約束條件

利用三角公式:

可將四元數(shù)轉化成姿態(tài)矩陣 b系到R系

可將四元數(shù)轉化成姿態(tài)矩陣 R系到b系

Tips:R系是一種用于描述空間中點位置的導航坐標系,其中的坐標值表示相對于地球的位置。b系是一種用于描述載體(例如航空器、船舶等)位置的坐標系,其中的坐標值表示相對于載體的位置。
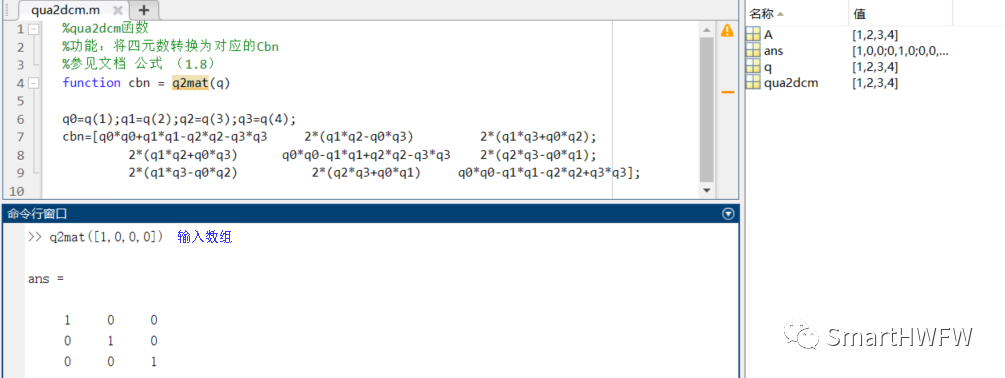
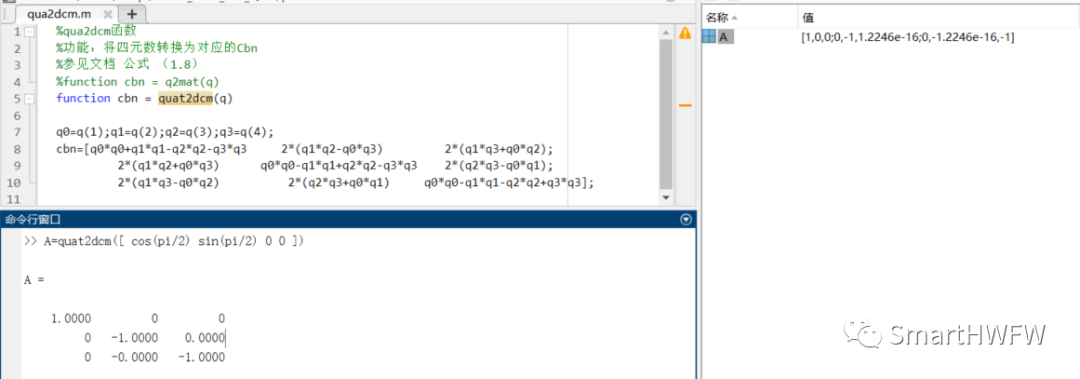
3. Matlabe四元數(shù)轉方向余弦矩陣
API
function[y1,...,yN]=myfun(x1,...,xM)聲明名為myfun的函數(shù),該函數(shù)接受輸入x1,...,xM并返回輸出y1,...,yN
q2mat(),qua2dcm(),quat2dcm()將四元數(shù)轉換矩陣
4.C語言實現(xiàn)四元數(shù)轉方向余弦矩陣
基于 QMI8658 姿態(tài)傳感器實現(xiàn)四元數(shù)轉換為方向余弦矩陣的過程如下:
STEP1: 根據(jù)傳感器獲取到的四元數(shù)數(shù)據(jù),我們可以得到四元數(shù)的四個分量:q0、q1、q2、q3。
STEP2: 我們可以根據(jù)四元數(shù)的定義,將其轉換為方向余弦矩陣。具體的轉換公式如下:
| C11 C12 C13 | | C21 C22 C23 | | C31 C32 C33 | 其中,C11、C12、C13、C21、C22、C23、C31、C32、C33 分別表示方向余弦矩陣的九個元素。
STEP3: 我們可以通過串口將獲取到的四元數(shù)和方向余弦矩陣輸出。
以下是基于 QMI8658 姿態(tài)傳感器獲取到的靜止放置在水平面,Z軸向上的四元數(shù)和方向余弦矩陣數(shù)據(jù):
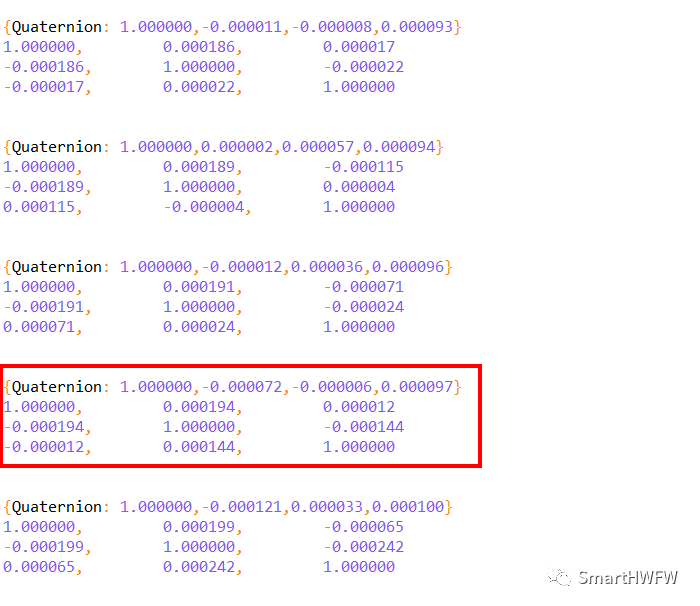
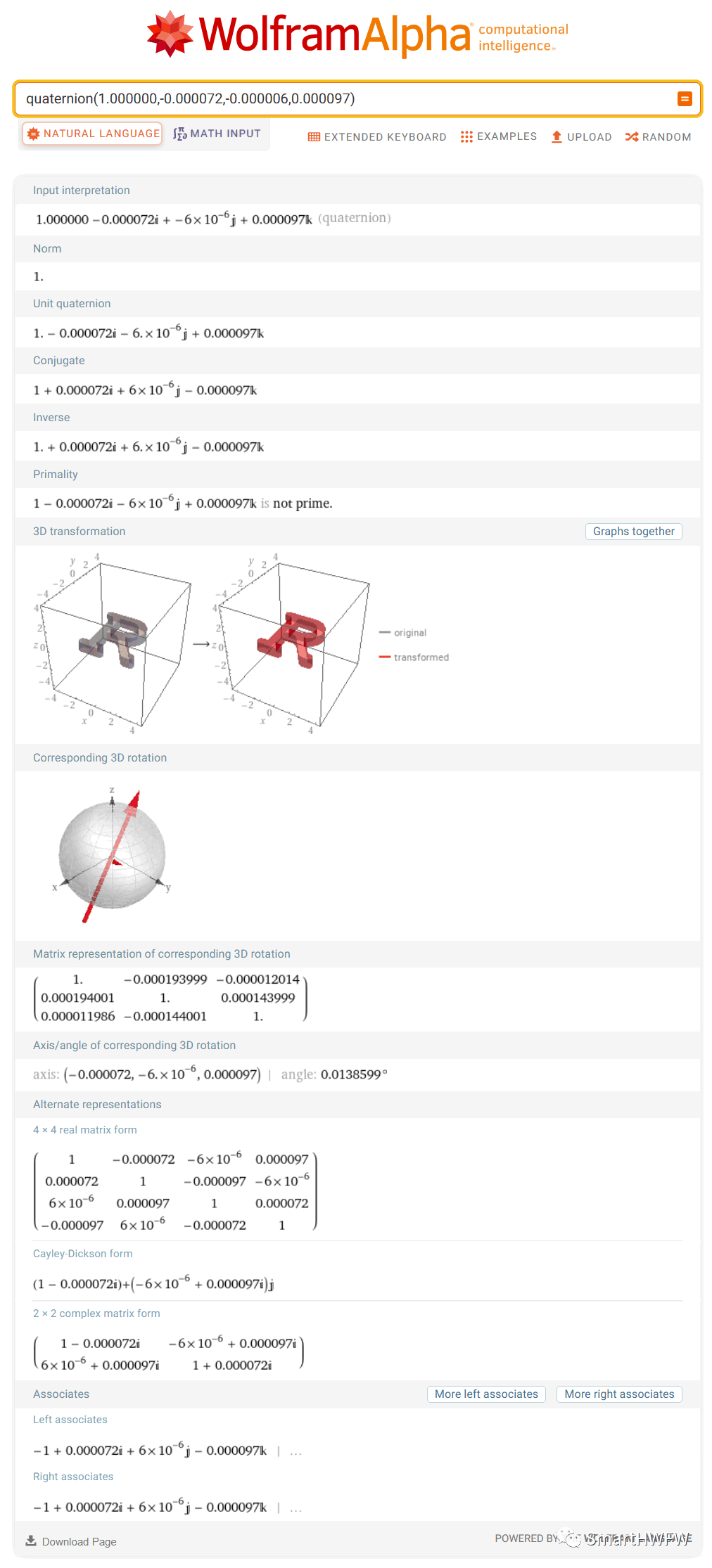
我可以使用Wolfram Alpha計算器進行計算和校驗,并給出結果。
審核編輯:劉清
-
傳感器
+關注
關注
2565文章
52930瀏覽量
766814 -
計算器
+關注
關注
16文章
439瀏覽量
38057
原文標題:MEMS_慣性傳感器程序集01-四元數(shù)轉方向余弦矩陣
文章出處:【微信號:SmartHWFW,微信公眾號:SmartHWFW】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
四元數(shù),卡爾曼資料
經(jīng)典干貨:無人機四元數(shù)解算姿態(tài)角解析
四元數(shù)更新算法問題
請問我用四元數(shù)轉歐拉角造成的這些問題該怎么解決?
【案例分享】四軸飛行器6050六軸傳感器軟件姿態(tài)解算
四元數(shù)飛控示意附圖
姿態(tài)解算需要頻繁組合旋轉和用旋轉變換向量
請問MotionFX庫中的四元數(shù)是如何排序的?
采用余弦相似度的習俗非負矩陣分解算法
MPU6050的四元數(shù)解算姿態(tài)方法

C語言實現(xiàn)歐拉角轉四元數(shù)

MSP430F5xx系列上使用方向余弦矩陣算法的九軸傳感器融合





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論