 如何配置通用定時器外設產生PWM驅動舵機?
如何配置通用定時器外設產生PWM驅動舵機?
1. 準備工作
硬件準備
- 開發板
首先需要準備一個開發板,這里我準備的是STM32L4的開發板(BearPi): - 舵機
舵機是電機的一種,又叫伺服電機,舵機的優勢是 可以設定轉到指定的位置 ,本文中使用的SG90型號的舵機可以在0°-180°的范圍內轉動到指定角度,在實際項目中使用非常廣泛。
在硬件上,SG90 舵機有三根線,紅色的為電源線(5V),棕色的為 GND ,橙色的為控制線,用來傳輸 PWM 信號。
那么,應該產生怎樣的PMW波形來控制舵機的轉動角度呢?
SG90的舵機要求 控制舵機的 PWM 信號頻率在50Hz左右 ,即周期為 20ms 的 PWM 信號, 當該信號的高電平部分在0.5ms - 2.5ms之間時,對應舵機轉動的角度 ,具體對應情況如下表:

下面結合一個動圖來理解:

圖片來源八色木
知識小卡片結束啦!對舵機有了解了嗎?
軟件準備
Keil MDK和串口助手Serial Port Utility 的安裝包都可以
2.生成MDK工程
選擇芯片型號
打開STM32CubeMX,打開MCU選擇器:

打開MCU選擇器
搜索并選中芯片STM32L431RCT6:

選擇芯片
配置時鐘源
- 如果選擇使用外部高速時鐘(HSE),則需要在System Core中配置RCC;
- 如果使用默認內部時鐘(HSI),這一步可以略過;
這里我都使用外部時鐘:

打開外部時鐘
配置通用定時器TIM16
定時器TIM
STM32L431xx 系列有 1 個高級定時器(TIM1), 3 個通用定時器(TIM2、TIM15、TIM16),兩個基本定時器(TIM6、TIM7),還有兩個低功耗定時器(LPTIM1、LPTIM2)。
STM32L431 的通用 TIMx (TIM2、TIM15、TIM16)定時器功能包括:
- 16 位(TIM15,TIM16)/32 位(TIM2)向上、向下、向上/向下自動裝載計數器,注意:
TIM15、TIM16 只支持向上(遞增)計數方式; - 16 位可編程(可以實時修改)預分頻器,計數器時鐘頻率的分頻系數為 1~65535 之間的任
意數值; - 4 個獨立通道(TIMx_CH1~4, 其中 TIM15 最多 2 個通道, TIM16 最多 1 個
通道);
這些通道可以用來作為:
- 輸入捕獲
- 輸出比較
- PWM 生成(邊緣或中間對齊模式)
- 單脈沖模式輸出
如下事件發生時產生中斷/DMA:
- 更新:計數器向上溢出/向下溢出,計數器初始化(通過軟件或者內部/外部觸發)
- 觸發事件(計數器啟動、停止、初始化或者由內部/外部觸發計數)
- 輸入捕獲
- 輸出比較

接下來開始配置TIM16定時器的PWM功能:
首先選擇TIM,選擇通道1的功能,默認的CH1是PA6引腳,但是開發板上是與 PB8 連接的,所以在右邊將PB8配置為TIM16_CH1:

打開TIM16并選擇PWM輸出引腳
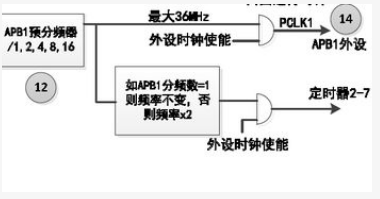
接下來是對TIM16的參數設置,參照數據手冊中的RCC時鐘樹,TIM16內部時鐘來源是PCLK2 = 80Mhz,我們的目的是產生20Hz的PWM,所以預分頻系數設置為80-1,自動重載值為20000-1,得到的計時器更新中斷頻率即為80000000/80/20000 = 50 Hz:

設置PWM輸出頻率
其余的一些設置保持默認即可,最后配置PWM占空比:

設置PWM占空比
配置時鐘樹
STM32L4的最高主頻到80M,所以配置PLL,最后使HCLK = 80Mhz即可:

設置時鐘樹
生成工程設置

工程設置
代碼生成設置
最后設置生成獨立的初始化文件:

代碼生成設置
生成代碼
點擊GENERATE CODE即可生成MDK-V5工程:

生成代碼
3. 在MDK中編寫、編譯、下載用戶代碼
啟動定時器并產生PWM
最后在main函數中開啟TIM2并使能其中斷(TIM2初始化代碼之后):
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM16_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim16,TIM_CHANNEL_1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
編譯下載之后,可以看到舵機旋轉到45°:

舵機轉動45°現象
動態改變舵機角度
上一個實驗中,我們配置了PWM波的高電平時長計數個數為1000,即時長為1ms,對應旋轉角度為45°,在本實驗中,我們來動態改變 PWM 占空比,使舵機在0°到180之間來回旋轉。
編寫如下代碼:
int main(void)
{
/* USER CODE BEGIN 1 */
uint16_t pluse = 500;
/* USER CODE END 1 */
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM16_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//產生PWM,舵機轉動
HAL_TIM_PWM_Start(&htim16,TIM_CHANNEL_1);
//1s后改變舵機角度,增加45°
HAL_Delay(1000);
pluse += 500;
if(pluse == 3000)
{
//如果舵機角度大于180°,回零
pluse = 500;
}
//設置PWM占空比
__HAL_TIM_SetCompare(&htim16, TIM_CHANNEL_1, (uint16_t)pluse);
}
/* USER CODE END 3 */
}
編譯下載后可以看到舵機在0°-180°之間來回旋轉。
至此,我們已經學會 如何使用通用定時器產生PWM驅動舵機 。
-
RCC
+關注
關注
0文章
93瀏覽量
27063 -
stm32cubemx
+關注
關注
5文章
284瀏覽量
15006 -
通用定時器
+關注
關注
1文章
17瀏覽量
3429 -
PWM驅動
+關注
關注
0文章
28瀏覽量
1245 -
MCU芯片
+關注
關注
3文章
253瀏覽量
11629
發布評論請先 登錄
相關推薦
如何使用STM32CubeMX配置STM32L431RCT6的通用定時器外設
如何利用stm32的高級定時器產生PWM
STM32—TIM3輸出PWM信號驅動MG996R舵機(按鍵控制)

STM32-通用定時器-PWM輸出
【STM32Cube_12】使用通用定時器產生PWM驅動蜂鳴器
STM32單片機基礎12——使用通用定時器產生PWM驅動蜂鳴器





 工商網監
工商網監
評論